

Методы лазерного дистанционного зондирования.
В настоящее время методы лазерного зондирования основываются на таких процессах, как рэлеевское рассеяние, комбинационное рассеяние, рассеяние Ми, резонансное рассеяние, флюоресценция, поглощение, а также дифференциальное поглощение и рассеяние. Кратко рассмотрим эти процессы.
Рэлеевское рассеяние - лазерное излучение, упруго рассеянное атомами или молекулами, наблюдается на исходной частоте
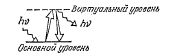
Рассеяние Ми – лазерное излучение, упруго рассеянное малыми частицами (размер которых сравним с длиной волны излучения), наблюдается на исходной частоте.

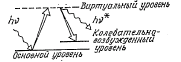
Комбинационное рассеяние – лазерное излучение, рассеянное молекулами, наблюдается с некоторым частотным сдвигом, характеризующим данные молекулы (hν- hν*= E)
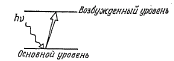
Резонансное рассеяние – лазерное излучение на частоте определенного перехода в атоме рассеивается с большим сечением и наблюдается на исходной частоте
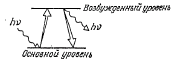
Флюоресценция – лазерное излучение на частоте определенного электронного перехода в атоме или молекуле претерпевает поглощение с последующим излучением на более низкой частоте; столкновительное тушение может уменьшить эффективное сечение этого процесса; в молекулах наблюдается широкополосное излучение

Поглощение – ослабление лазерного пучка наблюдается, если частота излучения попадает в полосу поглощения данной молекулы
Дифференциальное поглощение и рассеяние – дифференциальное ослабление двух лазерных пучков определяется по их сигналам обратного рассеяния; при этом частота излучения в одном из пучков настраивается близко к частоте данного молекулярного перехода, в то время как частота второго – несколько в стороне от частоты перехода
На рис. 1.3. приведены наблюдаемые диапазоны сечения рассеяния каждого из процессов.
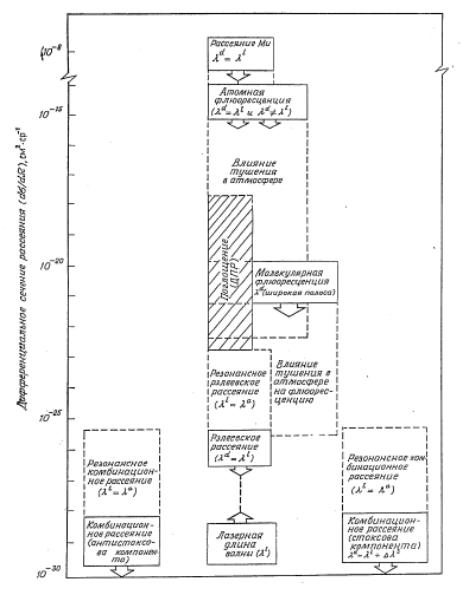
Как можно видеть из рисунка, сечения рассеяния Ми могут быть настолько большими, что даже незначительное количество рассеивающих частиц соответствующих размеров может дать сигнал рассеянного излучения, полностью перекрывающий сигналы, обусловленные рэлеевским или комбинационным рассеянием. Отсюда ясно, что с помощью лазера возможно зарегистрировать довольно малые концентрации (или изменения концентраций) частиц пыли или аэрозолей.
Хотя резонансное рассеяние, называемое иногда атомной или резонансной флюоресценцией, также имеет большое сечение, тушение при столкновениях с более распространенными составляющими атмосферы обычно приводит к тому, что сигнал оказывается слабым; вследствие этого наиболее эффективно метод может работать при исследовании малых составляющих верхней атмосферы. В случае молекулярной флюоресценции столкновительное тушение может также оказывать вредное действие, в частности тогда, когда имеются долгоживущие состояния. Широкополосная природа молекулярной флюоресценции является причиной низкого значения отношения сигнала к шуму; при этом основной вклад в шум дает фоновое излучение. С ростом продолжительности флюоресценции может падать пространственное разрешение.
К сожалению, из-за незначительной величины сечений комбинационного рассеяния чувствительность этого метода весьма ограниченна. Поэтому наиболее вероятным представляется применение комбинационного рассеяния для дистанционного контроля газодымовых шлейфов труб, концентрации составляющих в которых могут быть довольно высокими: 10—100 млн-1 по сравнению со значениями 0,1—5 млн-1, типичными для малых составляющих, рассеянных в атмосфере. Привлекательной особенностью комбинационного рассеяния является та легкость, с которой этот метод позволяет определить отношение концентрации любой составляющей к концентрации некоторой опорной компоненты (например, азота) по отношению комбинационных сигналов при условии того, что отношение сечений известно.
Для того чтобы выделить вклад поглощения интересующей нас молекулы в ослабление лазерного пучка, обычно применяется метод так называемого дифференциального поглощения. Данный метод предполагает использование двух частот: одной в центре линии из полосы поглощения интересующей нас молекулы, а другой — в крыле этой линии. За редким исключением, большинство полос поглощения, представляющих интерес для дистанционного зондирования, лежит в ИК- области спектра и соответствует колебательно-вращательным переходам. К основным недостаткам этого метода относятся низкое пространственное разрешение и малая чувствительность ИК- детекторов.
Высокие чувствительность и пространственное разрешение могут быть достигнуты при сочетании дифференциального поглощения с рассеянием (ДПР). Этот метод впервые был предложен для дистанционного определения содержания водяного пара в атмосфере. Он основан на сравнении обратно рассеянных лазерных сигналов: одного — на частоте линии поглощения (интересующей молекулы), а другого— в крыле линии. В этом случае пространственное разрешение и сильные сигналы на используемых частотах обусловливаются большим сечением рассеяния Ми, а отношение сигналов дает требуемую оценку дифференциального поглощения. Благодаря этому метод ДПР обладает наилучшей чувствительностью при зондировании определенных молекулярных составляющих с больших расстояний.
В последнее время широкое распространение получил лидар на дифференциальном поглощении, который используется для всех видов лазерной дистанционной техники, основанной на дифференциальном поглощении.
В конце первого десятилетия развития работ по лазерному дистанционному зондированию определенное внимание было уделено разработке систем для зондирования поверхности Земли с таких подвижных средств, как самолеты и вертолеты. Вначале эти лазерные системы использовались, в некоторой степени, подобно радарам; при этом основными типами взаимодействия излучения с поверхностью были рассеяние и отражение. Первыми вопросами, которым было уделено серьезное внимание, стали исследования поверхностных волн и батометрические измерения в прибрежных водах. Возможность лазерных исследований замутненности воды естественным образом проявилась в последующей серии экспериментов.
Важный шаг вперед был сделан после осознания того, что использование коротковолновых лазеров может расширить спектр приложений за счет возможности использования индуцированной лазерным излучением флюоресценции. Это привело к разработке новой лазерной системы дистанционного зондирования, получившей название лазерного флюорометра. Подробные спектроскопические исследования как сырой нефти, так и ее продуктов показали, что бортовой лазерный флюорометр, обладающий высоким разрешением, способен классифицировать нефтяные пятна с такой точностью, что его данные можно рассматривать как абсолютно достоверные.
Применение лазеров для зондирования окружающей среды является многосторонним: 1) лазеры используются для измерения концентраций основных и малых составляющих атмосферы и, следовательно, хорошо подходят для контроля загрязнение; 2) позволяют измерить термические, структурные и динамические характеристики как атмосферы, так и гидросферы; 3) дают возможность регистрировать пороговые концентрации определенных составляющих, что требуется в некоторых системах аварийного предупреждения о загрязнениях; 4) позволяют картографировать рассеивание сточных шлейфов и 5) делают возможным распознавание спектральных образов таких объектов зондирования, как нефтяные пятна.