

Глава vjj

СИЛЫ ИНЕРЦИИ, РАЗВИВАЮЩИЕСЯ В МЕХАНИЗМАХ МАШИН ВО ВРЕМЯ ХОДА, И ВОЗДЕЙСТВИЕ МАШИНЫ НА
РАМУ И ФУНДАМЕНТ
1. Силы инерции кривошипного механизма одноцилиндрового
поршневого двигателя
Аналитическое исследование движения кривошипного механизма. Вопрос об учете сил инерции в кривошипном механизме обычно решается аналитическим путем, так как для этого типа механизмов аналитические выражения для ускорений звеньев,
необходимые в подсчетах сил инерции, при встречающихся соотношениях между длинами звеньев, получаются достаточно простыми. Нам прежде всего понадобятся аналитические выра-Фиг. 75 жения для ускорения 3-го звена
(ползуна, штока и поршня) и для ускорения центра тяжести шатуна. Обратимся к их выводу. Составим выражение для расстояния ползуна от главного вала О, пользуясь схемой механизма (фиг. 75) и введя в качестве основного параметра угол поворота кривошипа ?. Из чертежа имеем
хь = OA' + A'B = r cos ф-Н cos & (126)
Так как АА\ с одной стороны, равно
A4' = rsin<?,
а, с другой стороны,
ЛЛ' =/sin
то
rsin<p = /sin р,
или
Ho для выражения (126) нам нужен cosf), поэтому
cosjBeBJ/l—sin*[*«= 1 1 — ^ siir 9, (127>
Так как величина X кривошипных механизмов небольшая:
в среднем v -5 . -*« ' .... то значение корня может быть взято приближенно, воспользовавшись разложением корня по строке Ньютона н ограничиваясь в разложении ряда третьими степе-нами X (с точностью до Xе). Произведя это разложение, получим
cos р =^ (1— X» sins ф)''* — I—Vt *e sin1 ф —
— Sin4 Ф — «ГГл * s1h1'Ф — J. %
Ограничиваясь членами с точностью до х?, будем иметь
cos р Si 1— /tj^ sin5 ф = 1---4- cos* ф%
Поэтому с этой точностью получим
xh = г cos*© + м 1--— ~4—— cos 2ф I.
\ 4 4 * /
Для разыскания скорости поршня диференцируем это выражение но времени, придерживаясь порядка
хж _dxe_ dxp _ <1хъ
v*~ dt — df \ dt" d? 0)1'
найдем
\\ = —гсо/ sin© + тгsin2©V (128)
Знак минус указывает, что, при положительном значении выражения в скобках, направление скорости будет обратным направлению возрастающих л\ т. е. по направлению к главному валу.
Для разыскания ускорения \\"ь диференцируем уравнение (128) по времени, предполагая угловую скорость вращения постоянной, т. е. по схеме
117 rf? _ dV6
wb — dt df dt dt ,#
найдем
Wb = — r»? (cos ф -f /. cos 2ф> (129)
Звак минус указывает, что ускорение будет направлено против возрастающих х, т. е. к главному валу при значении выражения
в скобках >0.
Как ускорение так и скорость Vt по ф-лам (128) и (129> получаются с точностью до членов с
Более точные значения cos з, х#, к, и Wb, разложенные по косинусам кратных дуг, будут
cos £г= (1— V. >>" - Ve. — 'Ли —. •.) + + 0/« X2 + Vieх< 4- 15Аи х6 + • • •) cos 6а>; = л cos <р + / [(1 — V4 X» — 3; 64 X" — */1И х° +...) -4-+ О/. ^ + Vie ^' +1V»» х6 + • • •) cos 2? — - 07м v + %т х° + ■ ■ •) cos 4с? + (Тем х° + • • •) cos б
V, = — г со, [sin ? + ('/2 X + у, X' + "/ив X5 +...) sin 2f-
- (Vie ^ + Ve.Х5 + • • •) sin 4 ? + (»/„. Xs +...) sin 6?];
jf* = — ''<"? [cos с? +.(Х +1/.хз + 15/i2s >5 +...) cos 2?-— ОД хз + Ve X» +...) cos 4 с? + (»/lt8 X5 +...) cos 4<р].
Или при
52 = ^+1/^3+16/i,b^ + ...
°е 128 5
(130) (131)
(132)
= — г ад2 (cos <р + Б2 cos 2? 4-£4 cos 4<р-f- Б6 cos 6<р). (131а)
Численные значения коэфициентов В2> Б4, BQ:
К 1/3.5 1/4 1/4,5 1/5 1/6 1/7
в2 0,2918 0,2540 0,2250 0,2020 0,1678 0,1436
в\ —0,0062 -0,0041 —0,0028 —0,0020 —0,0012 —0.0007
вб 0,000126 0,000069 0,000038 0,000022 0,000009 0,000004
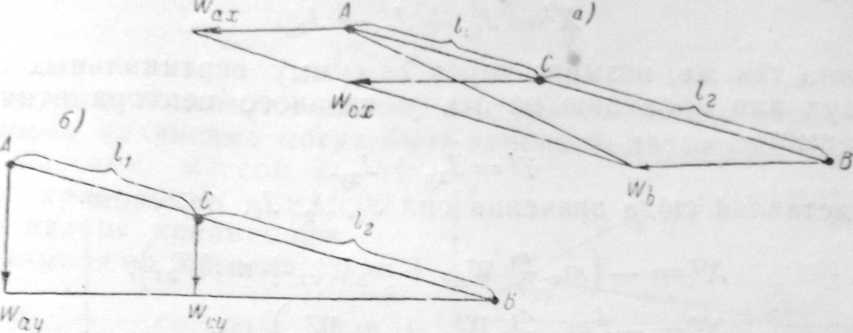
Составим еще выражение для ускорения W —центра тяжести шатуна.
Из теоремы подобия для группы точек, жестко между собою связанных, как Л, 5, С, известно из кинематики, что на плане ускорений конец вектора а) бJ ускорения \VC дол-
а i w жен находиться на
Wqs^ _____в (Х<^ отрезке, проведен-
ном (фиг. 76, б) между концами векто-Фиг. 76. ров Wa и Wb> и де-
лить этот отрезок в
отношении АС: СВ. То же самое получается и при построении ускорений в самих точках Л, В, С шатуна (фиг. 76, а). Применяя эту теорему подобия для проекций ускорения на оси х и у, получим: 1) вектор Wex будет оканчиваться на прямой, соединяющей концы векторов wax и Wb (фиг. 77, а), откуда
Wer « Wb ^ + Wrs if ; (133)
2) вектор U' .v, будет оканчиваться на прямой, соединяющей ieu вектопа \\
л м i
% 07
(134)
Фиг
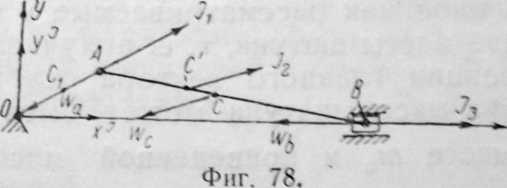
Выражение для суммарной горизонтальной и суммарной вертикальной сил инерции кривошипного механизма. В дальнейшем нам понадобится выражение для суммарной составляющей сил инерции как в горизонтальном, так и в вертикальном направлении; обратимся к их выводу. На фиг. 78 изображены силы инерции, возникающие в частях кривошипного механизма при равномерном вращении кривошипа:
Vj — центробежная сила кривошипа,
Л — сила инерции шатуна,
J,— сила инерции поступательно движущихся масс поршня,
штока и крейцкопфа. Обозначим через ех — эксцентриситет положения центра
тяжести Тогда на гл. V.
i кривошипа, основании § 1,
Л = mKet ш2,
где шк — масса кривошипа.
Так как г ш| == Wn— ускорение пальца кривошипа (предполагая вращение кривошипа равномерным), то
У, т
в»
здесь масса тк — носит название массы кривошипа» отнесенной
к его пальцу Л.
Выражение для Л по § 3 той же гл. V будет
где /я, — масса шатуна, a Wc—ускорение центра тяжести шатуна.