

6.3. Планетарные передачи.
Различают 4 основных типа планетарных ступеней (так называемых механизмов Давида) (рис.6.3, схемы І - ІV):
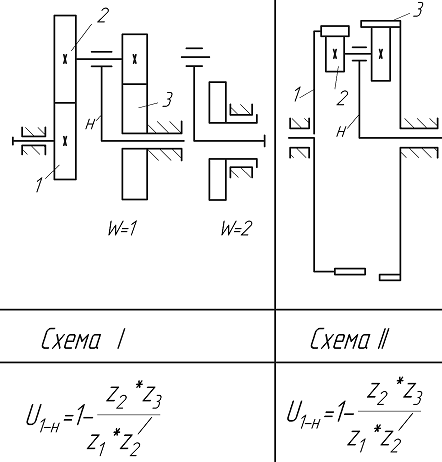
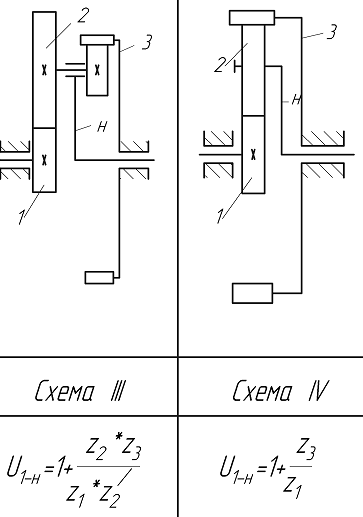
Рис.6.3. Кинематические схемы планетарных передач
Условные обозначения звеньев планетарных механизмов на рис. 6.3: 1 – центральное колесо, 2 – сателлиты, 3 – опорное (неподвижное) колесо; H – водило (от заглавной буквы слова Hedel – рычаг).
Преимущества планетарных передач:
- компактность при больших передаточных отношениях U;
- возможность передачи больших крутящих моментов (т.к. при их передаче используется несколько сателлитов);
Недостатки планетарных передач:
- сложность изготовления;
- требуются высокая точность изготовления и сборки.
6.3.1. Вычисление передаточного отношения планетарной передачи
Аналитический
метод.
Используем метод обращения движения –
т.е. всему механизму, в том числе
неподвижному колесу, условно придается
(сообщается) угловая скорость -![]() (то есть все звенья в таком механизме
уменьшают скорость на величину угловой
скорости водила
).
Тогда в этом так называемом обращенном
механизме
водило H
станет неподвижным, и мы получим простой
ступенчатый механизм с неподвижными
осями. Угловые скорости исходного
планетарного и обращенного механизма
сведем в таблицу:
(то есть все звенья в таком механизме
уменьшают скорость на величину угловой
скорости водила
).
Тогда в этом так называемом обращенном
механизме
водило H
станет неподвижным, и мы получим простой
ступенчатый механизм с неподвижными
осями. Угловые скорости исходного
планетарного и обращенного механизма
сведем в таблицу:
№№ звеньев |
Угловые скорости |
|
В планетарном механизме |
В обращенном механизме |
|
1 2 3 H |
|
|
Вычисляем передаточные отношения обращенного механизма (на примере схемы I):
через угловые
скорости
![]() (6.2)
(6.2)
через числа зубьев
колес
![]() (6.3)
(6.3)
Из уравнений (6.2)
и (6.3) получим:
![]()
Для других схем планетарных механизмов (рис. 6.3) выводы формул расчета передаточных отношений аналогично предыдущему.
Общая формула имеет вид
![]() ,
,
где
![]() - передаточное отношение обращенного
механизма.
- передаточное отношение обращенного
механизма.
Графический метод расчета передаточного отношения планетарной передачи заключается в том, что сначала строят кинематическую схему механизма в масштабе, затем картину (план) линейных скоростей и картину угловых скоростей. Используя геометрические размеры построений, вычисляют передаточное отношение. Рассмотрим последовательность решения на примере механизма, изображенного на рис. 6.4.

Рис. 6.4. План механизма (а), картина линейных скоростей (б) и план угловых скоростей (в)
Последовательность решения
Строится кинематическая схема планетарного механизма в двух проекциях в выбранном масштабе (рис.6.4а). Для этого рекомендуется радиусы зубчатых колес (в мм) на схеме принимать равными числам зубьев (т.е. условно принимать модуль m = 2).
Строится план окружных линейных скоростей механизма в следующей последовательности. Из полюса зацепления 1 и 2 колес (точки Р12 на правой проекции механизма) проводят вектор VP12 произвольной длины. Он изображает линейную скорость точки P12. Соединив конец этого вектора с точкой O1, получают треугольник скоростей колеса 1. Здесь гипотенуза изображает изменение линейных скоростей колеса 1 от оси вращения до делительной окружности.
Строится треугольник скоростей звена 2. Для этого конец вектора VP12 соединяют с неподвижным полюсом P23 зацепления колес 2 и 3.
Строится треугольник скоростей водила Н. Для этого из точки O2 проводят вектор линейной скорости V02 до гипотенузы (прямой между точками P23 и VP12 ) треугольника скоростей сателлита 2. Соединив конец вектора VO2 с точкой ОH гипотенузой, получают треугольник скоростей водила Н.
Как известно, величина передаточного отношения механизма равна отношению угловых скоростей (U1-H = 1/Н). Величины угловых скоростей 1-го колеса 1 и водила Н пропорциональны тангенсам углов 1и Н на плане окружных линейных скоростей. Но так как углами при расчетах пользоваться не совсем удобно, то строится план частот вращения. Для этого проводят вертикальный отрезок ОР произвольной длины. Через точку О проводят горизонтальную линию. Из точки Р проводят под углами 1, 2, Н к отрезку ОР линии Р1, Р2 и РН, параллельные гипотенузам треугольников окружных скоростей. Отрезки Р1, Р2 и РН пропорциональны частотам вращения звеньев I, 2 и Н. Для вычисления передаточных отношений достаточно измерить длины этих отрезков и подставить в нижеприведенные формулы. Причем, если соотносимые отрезки лежат по одну сторону от точки О, то передаточное отношение берется со знаком плюс, если по разные – со знаком минус:
Uгр1-Н = О1/ОН, Uгр12 = - О1/О2 .
При этих построениях принимается, что окружная линейная скорость точки А, принадлежащей колесу 1, равна
![]() ,
,
скорость точки О2, принадлежащей сателлиту, равна
![]() ,
,
угловая скорость центрального колеса 1, равна
![]() ,
,
угловая скорость водила Н
![]() ,
,
а величина передаточного отношения от колеса 1 к водилу Н будет равна
![]()