

3.3. Силовой анализ характерных структурных групп
3.3.1. Структурная группа 2-го класса 1-го вида
Известны:
внешние силы
![]() и
и
![]() ,
а также точки их приложения К2
и К3.
,
а также точки их приложения К2
и К3.
Найти: реакции в кинематических парах А, В и С (рис.3.4.).
Последовательность решения:
Строим структурную группу в масштабе длин L (рис.3.4).
Наносим на неё все внешние силы и .
В кинематических парах А и С действие отброшенных звеньев (например, кривошипа 1 и стойки 0) заменяем силами реакций
 и
и
 ,
разложив каждую из них на нормальную
и тангенциальную составляющие:
,
разложив каждую из них на нормальную
и тангенциальную составляющие:
 =
= +
+ и
и
 =
= +
+ .
.Составляем уравнение равновесия структурной группы:
![]() ;
или
;
или
![]() (3.1)
(3.1)
Вычисляем величины тангециальных сил; для этого используем условие, что моменты сил относительно точки В, приложенных к звеньям 2 и 3, равны нулю:
![]() ;
;
![]() ,
откуда
,
откуда
![]() ;
;
![]() ;
;
![]() ,
откуда
,
откуда
![]() .
.
Следует учитывать, что если в процессе решения эти тангенциальные силы получись с отрицательным знаком, то на плане структурной группы их предварительно выбранное направление следует поменять на противоположное.
Неизвестные
 и
и
 находим путём графического изображения
векторного уравнения (3.1) в масштабе,
то есть, строим
план сил структурной группы.
находим путём графического изображения
векторного уравнения (3.1) в масштабе,
то есть, строим
план сил структурной группы.
Для
построения плана сил
выбираем масштаб плана сил:
 ,
Н/м, где
,
Н/м, где
![]() – длина вектора в мм, изображающего
силу
– длина вектора в мм, изображающего
силу
![]() на плане сил, выбирается произвольно.
При выборе учитываются два условия:
чтобы план сил разместился на отведённом
месте чертежа, а масштаб был удобен для
расчётов (был «круглым» числом).
на плане сил, выбирается произвольно.
При выборе учитываются два условия:
чтобы план сил разместился на отведённом
месте чертежа, а масштаб был удобен для
расчётов (был «круглым» числом).
Переводим
(пересчитываем) силы уравнения (3.1) в
векторные отрезки с длинами:
![]() ,
мм;
,
мм;
![]() ,
мм;
,
мм;
![]() ,
мм.
,
мм.
Тогда уравнение (3.1) запишется в виде
![]() (3.2).
(3.2).
Построение плана сил ведём в последовательности написания уравнения (3.2) (рис. 3.5).
Вычисляем реакции:

![]() ,
,
где
длины отрезков
![]() и
и
![]() берем в мм из плана сил.
берем в мм из плана сил.
Определяем реакцию в кинематической паре В. Для этого составляем векторное уравнение равновесия звена 2 или звена 3; например, условие равновесия звена 2 можно записать в виде:
![]() , (3.3).
, (3.3).
где R3-2 – сила реакции в кинематической паре В.
Так
как
и
известны, то, построив план сил звена 2
(рис. 3.6), то есть графически изобразив
уравнение (3.3), получим силу
![]() :
:
![]() .
.
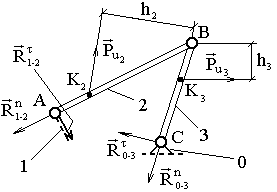
Рис. 3.4. План структурной группы 2 класса 1 вида
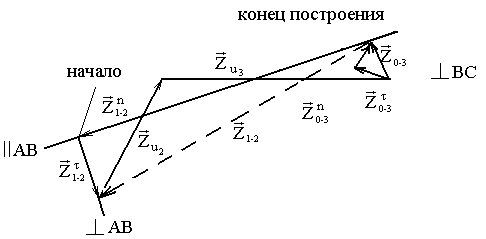
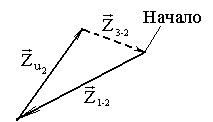
Рис. 3.5. План сил структурной группы Рис. 3.6. План сил звена 2
3.3.2. Структурная группа 2-го класса 2-го вида
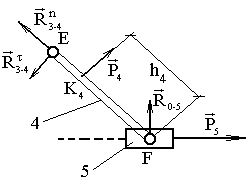
Рис. 3.7. План структурной группы 2 класса 2 вида
Условие равновесия структурной группы (рис. 3.7):
![]() .
(3.4)
.
(3.4)
Величина тангенциальной составляющей силы реакции в шарнире вычисляется по формуле, полученной из условия равенства нулю моментов всех сил, приложенных к шатуну 4, относительно точки F:
![]() ;
;
![]() ,
,
откуда
находим
![]() ,
,
где h4 – плечо силы Р4 относительно точки F, берется из плана структурной группы (рис.3.5.), построенной в масштабе длин L.
Силы
![]() и
и
![]() берут из плана сил, построенного с
использованием уравнения (3.4) в выбранном
масштабе
берут из плана сил, построенного с
использованием уравнения (3.4) в выбранном
масштабе
![]() ,
а силу
,
а силу
![]() находят из уравнения равновесия ползуна
находят из уравнения равновесия ползуна
![]() ,
построив план сил ползуна.
,
построив план сил ползуна.