

Способы, основанные на уменьшении напряжения питания статора u1
!!! Мвр
![]() ,
=> все методы, основанные на
U1 в приводят к резкому уменьшению
Мвр.
,
=> все методы, основанные на
U1 в приводят к резкому уменьшению
Мвр.
Изменение МХ при уменьшении напряжения питания U1
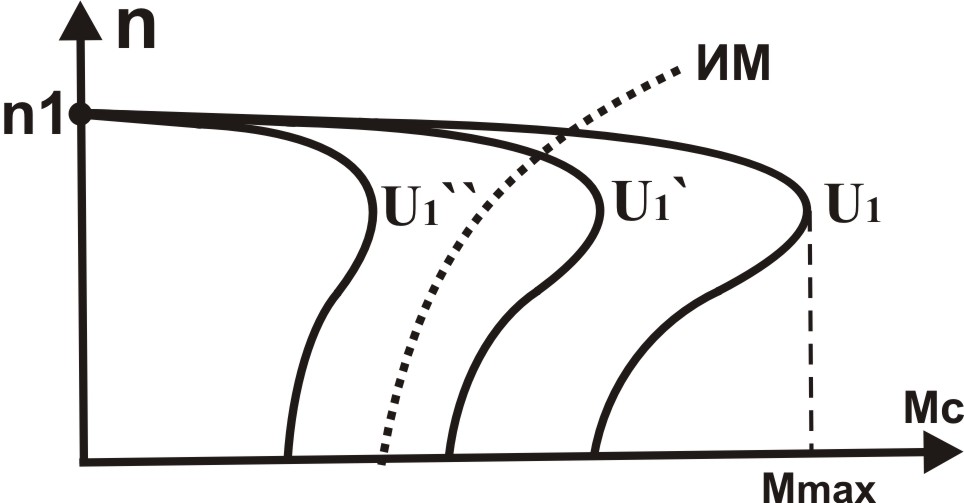
Достоинство – простота реализации
U1 можно уменьшить:
1. с помощью трансформатора
включить последовательно со статором 3 катушки индуктивности
при пуске включить обмотки статора звездой (U1=Uл/3), после разгона АД переключить обмотки на треугольник ((U1=Uл). При пуске напряжение в 3 раз, а Мвр в 3 раза.
2. Методы, основанные на сопротивления ротора r2
1. Короткозамкнутый ротор с улучшенными пусковыми характеристиками – имеет две клетки с разным сопротивлением. При пуске ток течет по клетке с большим сопротивлением, после разгона частота тока в роторе резко падает, и ток течет по клетке с малым сопротивлением.
2. В АД с фазным ротором при пуске в цепь ротора включают трехфазный пусковой реостат RП >> r2 Токи I2 и I1 резко уменьшаются.
Поскольку максимальный момент не зависит от активного сопротивления ротора, то можно обеспечить пусковых токов без момента, т.е. обеспечить плавный пуск нагруженного АД.
– нужен АД с фазным ротором
– большие потери энергии в пусковом реостате
Влияние активного сопротивления ротора на МХ
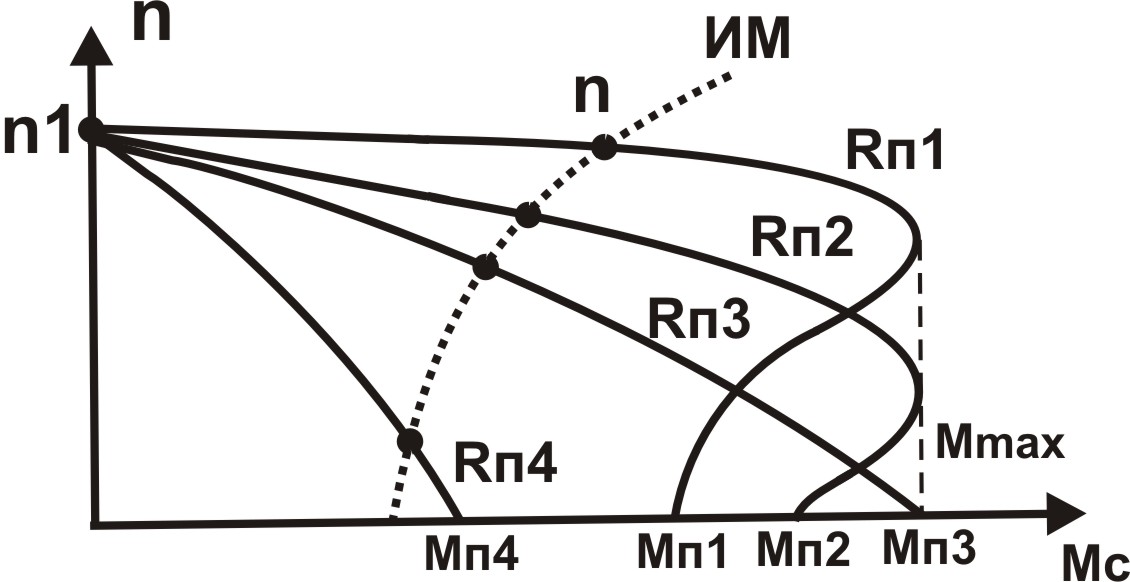
При увеличении RП МХ становится более мягкой.
При не слишком больших RП пусковой момент возрастает МП3> МП2> МП1 и может стать равным Мmax.
Регулирование скорости вращения ад
Скорость ротора n мало отличается от скорости МП n1 (всего на 2–6 %), поэтому чтобы изменить n нужно изменять n1
=> два пути:
Изменение частоты сети f1
+ можно плавно увеличивать и уменьшать n1 => n
– нужны сложные и дорогие преобразователи частоты.
Используется для маломощных АД.
Изменение числа пар полюсов р
+ простота и экономичность
– ступенчатое регулирование
– можно только уменьшить скорость р=1 n1=3000
р=2 n1=1500 и т.д.
– нужен АД со сложным статором (с большим числом обмоток).
3. В АД с фазным ротором можно плавно регулировать скорость от 0 до nном, изменяя сопротивление мощного пуско–регулировочного реостата (см. предыдущий рис.)
Применение АД – очень широкое
Достоинства и недостатки:
+ простота конструкции, высокая надежность, низкая стоимость, жесткая МХ, различные варианты исполнения (герметичные, взрывобезопасные, хим. защищенные и т.д.).
– сложность регулирования скорости
– при f=50 Гц nном < 3000 об/мин
Синхронные двигатели. Конструкция, принцип действия
В отличие от асинхронного двигателя частота вращения ротора синхронного двигателя постоянная при различных нагрузках и равна скорости магнитного поля. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компрессоры, вентиляторы). Так же как и асинхронном, в статоре синхронного электродвигателя размещается трехфазная обмотка, подключаемая к сети трехфазного тока и образующая вращающееся магнитное поле. Ротор двигателя состоит из постоянного магнита или сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор. Роторы синхронных машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). На рис. 1а изображен сердечник 1 явнополюсного ротора с выступающими полюсами. На полюсах размещена катушка возбуждения 2. На рисунке 1б изображен неявнополюсной ротор, представляющий собой ферромагнитный цилиндр 1. На поверхности ротора в осевом направлении фрезеруют пазы, в которые укладывают обмотку возбуждения 2.
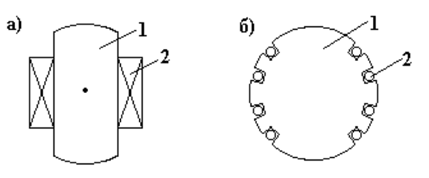 Рис.
1
Рис.
1
Рассмотрим принцип работы синхронного двигателя на модели (рис. 2).
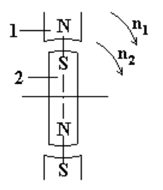
У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
Известны следующие способы пуска синхронного двигателя: с помощью вспомогательного двигателя, частотный и асинхронный. В первом случае С. э. с отключенной нагрузкой разгоняется до синхронной частоты вращения вспомогательным пусковым двигателем небольшой мощности. При частотном пуске плавно изменяется (увеличивается) частота напряжения в статорной обмотке.
Наибольшее распространение получил асинхронный пуск синхронного двигателя. В пазах полюсов ротора укладывается дополнительная короткозамкнутая обмотка. Вращающее магнитное поле статора индуктирует в короткозамкнутой пусковой обмотке вихревые токи. При взаимодействии этих токов с магнитным полем статора образуется асинхронный электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приближается к частоте вращения статорного поля, двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Важное достоинство синхронного двигателя состоит в том, что он позволяет регулировать коэффициент мощности изменением тока возбуждения. Таким путем можно установить коэффициент мощности, равный 1. В случае недовозбуждения (ток возбуждения меньше номинального) двигатель потребляет ток, отстающий по фазе от напряжения питания, и действует как индуктивная нагрузка; в случае же перевозбуждения он потребляет ток, опережающий по фазе напряжение, и действует как емкостная нагрузка. Благодаря этой особенности синхронный двигатель представляет большую ценность с точки зрения компенсации индуктивных реактивных токов, т.е. повышения коэффициента мощности.