

2.2.Последовательность выполнения работы
Для исследования трехосного блока микромеханических акселерометров используется бесплатформенная курсовертикаль фирмы Innalabs, показанная на фотографии рис.2.2. Там же показано направление осей курсовертикали, с которыми совпадают и оси трех акселерометров, установленных в курсовертикали.

Рис.2.2. Бесплатформенная курсовертикаль фирмы Innalabs
Проведение измерений для калибровки акселерометров.
Установить курсовертикаль (рис.2.2) на площадку ОДГ, сориентировав осью X вдоль оси вращения вала (в направлении от ОДГ).
Подключить кабель одним концом к разъему курсовертикали, другим концом – к COM порту компьютера (или к порту USB используя переходник COM-USB).
Включить питание курсовертикали. На ее корпусе в районе разъема должен загореться красный индикатор.
Запустить программу Pointer23.exe (см. рис.2.3).
Рис.2.3. Основное окно программы Pointer
Выбрать в меню “Calibration” пункт “On Optical Dividing Head” для перехода к калибровке. В результате откроется окно рис.2.4.
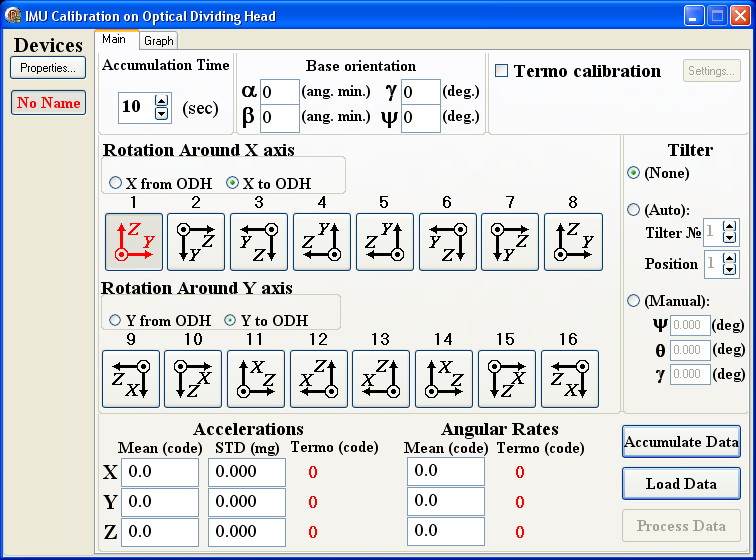
Рис.2.4. Окно программы Pointer для проведения калибровки на ОДГ
Выставить время набора данных 10 сек в поле “Accumulation Time” (см. рис.2.4).
Выставить нули по углам
 в группе полей “Base
orientation” как показано на
рис.2.4.
в группе полей “Base
orientation” как показано на
рис.2.4.Кликнуть кнопку “Properties” (см. рис.2.4). В результате откроется окно рис.2.5, в котором в поле “Port Name” надо в выпадающем списке выбрать номер COM-порта, к которому подключена курсовертикаль.
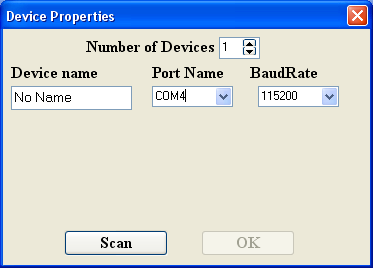
Рис.2.5. Окно“Device Properties” программы Pointer
Просканировать указанный порт, кликнув на кнопку “Scan”. В поле “Device name” вместо надписи “No Name”должно появиться название курсовертикали.
Кликнуть кнопку “OK” для завершения установок программы.
С помощью рукоятки ОДГ установить курсовертикаль в первое положение согласно табл.2.1.
В списке положений “Positions” (рис.2.4) выбрать положение 1.
Выполнить измерение сигналов акселерометров, нажав кнопку “Accumulate Data” в окне программы (рис.2.4).
Повторить п.1.11 – п.1.13 трижды, устанавливая курсовертикаль каждый раз в новое положение согласно табл.2.1, и выбирая в списке положений (рис.1.4) соответственно положения 2, 3, 4. Каждый раз для набора данных нажимать кнопку “Accumulate Data”.
Переустановить курсовертикаль на площадке ОДГ, сориентировав осью Y вдоль оси вращения вала (в направлении от ОДГ).
Повторить п.1.11 – п.1.14, устанавливая с курсовертикаль в положения согласно второй части табл.2.1, и выбирая в списке положений (рис.2.4) соответственно 13, 14, 15, 16. Каждый раз для набора данных нажимать кнопку “Accumulate Data”.
Закончить калибровку в программе Pointer, закрыв окно рис.2.4.
Осредненные сигналы акселерометров в каждом из положений автоматически записываются в текстовый файл вида
OpticalDividingHead_ггггммддччмм.Txt,
где ГГГГ, ММ, ДД – год, месяц, день проведения теста; ЧЧ, ММ – время в часах и минутах. Структура этого файла представлена в табл.2.2.
Таблица 2.2. Структура текстового файла OpticalDividingHead_ГГГГММДДЧЧММ.txt, создаваемого программой Pointer
Серийный № курсовертикали |
(№-1) положения в программе Pointer |
|
|
Выходные сигналы 3-х ДУС, Ui |
Выходные сигналы 3-х акселерометров |
Температуры 3-х ДУС |
Температуры 3-х акселерометров |
Температуры 3-х магнитометров |
||
Акселерометр X, Uaxi |
Акселерометр Y, Uayi |
Акселерометр Z, Uazi |
||||||||
1 |
2 |
3 |
4 |
5 - 7 |
8 |
9 |
10 |
11 - 13 |
14 - 16 |
17 - 19 |
PW09 |
0 |
0 |
0 |
-517.00 |
-1092.89 |
-77.13 |
12866.30 |
25365 |
7963 |
7872 |
PW09 |
1 |
0 |
0 |
-523.06 |
-252.76 |
12942.89 |
-370.99 |
25365 |
7963 |
7868 |
PW09 |
2 |
0 |
0 |
-544.62 |
334.90 |
-308.34 |
-13329.13 |
25366 |
7966 |
7869 |
PW09 |
3 |
0 |
0 |
-537.22 |
-504.34 |
-13326.64 |
-88.55 |
25366 |
7967 |
7867 |
PW09 |
12 |
0 |
0 |
-516.09 |
-1086.04 |
-82.90 |
12867.33 |
25380 |
7986 |
7875 |
PW09 |
13 |
0 |
0 |
-529.90 |
-13478.39 |
152.03 |
-214.92 |
25383 |
7986 |
7880 |
PW09 |
14 |
0 |
0 |
-543.97 |
333.63 |
-311.28 |
-13324.92 |
25383 |
7987 |
7880 |
PW09 |
15 |
0 |
0 |
-529.13 |
12715.78 |
-548.21 |
-243.23 |
25385 |
7989 |
7879 |
Примечания:
Колонка 2 показывает положение курсовертикали в соответствии с окном программы Pointer (рис.2.4). При этом нумерация начинается с нуля, т.е. номера положений в файле (табл.2.2) на единицу меньше чем на рис.2.4.
Выходные сигналы ДУС (колонки 5 – 7), акселерометров (колонки 8 – 10), термодатчиков (колонки 11 – 19) записываются в файл в кодах АЦП, получаемых после преобразования аналоговых сигналов в цифровые.
В колонках 5 – 19 табл.2.2 приведены типичные значения выходных сигналов и температур.
В данной работе для калибровки блока 3-х акселерометров нужны данные только колонок 8 – 10 (выделены в табл.2.2 желтым цветом).
Записать в табл.2.3 результаты измерения выходных сигналов акселерометров Uax , Uay , Uaz для каждого i-го положения блока акселерометров в соответствии с табл.2.1. Данные взять из файла, созданного программой Pointer (см. табл.2.2) .
Таблица 2.3. Результаты измерения выходных сигналов акселерометров
-
Номер положения акселерометра, i
Угол по ОДГ
Выходной сигнал акселерометра
Uaxi
Uayi
Uazi
Поворот вокруг оси X
1
0
2
90
3
180
4
270
Поворот вокруг оси Y
5
0
6
90
7
180
8
270