

1.5 Технологии формирования управляющего сигнала. Шим модуляция и пид регулирование
На сегодняшний день большинство двигателей управляются микроконтроллерами. На выходе микроконтроллера может быть два вида сигнала для управления двигателем:
аналоговый выход : силовые ключи нужны для усиления и преобразования сигнала (тратят мощность, громоздки, ненадежны);
выход с широтно-импульсной модуляцией (ШИМ) – выдается цифровой сигнал специальной формы (частота одна, а вот длина сигнала внутри периода разная – чем длиннее сигнал в периоде, тем выше скважность, тем выше средняя мощность – значит можно регулировать!)
Все микропроцессоры работают с цифровыми сигналами, т.е. с логическим нулем (0 В), или логической единицей (5 В или 3.3 В). Поэтому микропроцессор не может сформировать на выходе промежуточное напряжение. Использование для этих целей внешних ЦАП сложно и задействует сразу много ножек микропроцессора. Поэтому формирование аналогового напряжения при применении цифровой техники очень не удобно. ШИМ может быть встроенным выходом микропроцессора, может быть организована отдельно на выходе микропроцессора с обычным цифровым выходом.
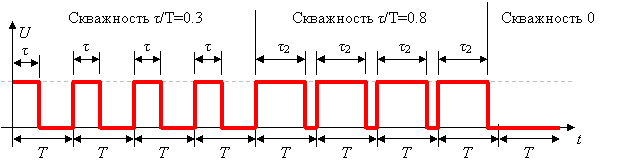
Широтно-импульсная модуляция представляет собой периодический импульсный сигнал. Соотношение длины импульса (τ) к периоду импульсов (T) называется скважностью и пропорционально модулирующей величине (рисунок 1.11). Если сформированный таким образом сигнал подать на объект, обладающий фильтрующими свойствами, например, на двигатель постоянного тока или лампу накаливания, то объект будет использовать среднюю мощность сигнала.
Т.е. мощность, потребляемая объектом управления, пропорциональна скважности сигнала ШИМ, при условии, что период импульсов ШИМ на порядок меньше минимальной постоянной времени объекта. Для двигателей постоянного тока достаточно сформировать ШИМ с периодом 2-4 кГц.
 Рисунок
1.11 - Форма сигналов ШИМ
Рисунок
1.11 - Форма сигналов ШИМ
Широтно-импульсная модуляция применяется во многих областях электроники. В частности она применяется для управления мощностью исполнительных механизмов вместо управления аналоговым напряжением.
Сигнал ШИМ формируется микропроцессорами, в которые встроен ШИМ, автоматически. Один микропроцессор способен формировать до 3 аппаратных сигналов ШИМ. Кроме того, сигнал ШИМ можно формировать программно по таймеру.
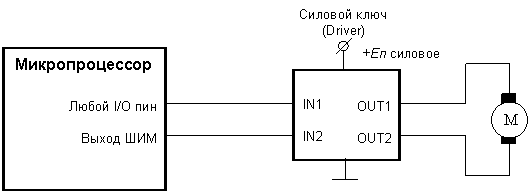
Удобно формировать 7-битный ШИМ. В этом случае управляющий силовой ключ можно подключить по схеме, изображенной на рисунке 1.12.
 Рисунок
1.12 - Способ подключения силового ключа
к выходу ШИМ.
Рисунок
1.12 - Способ подключения силового ключа
к выходу ШИМ.
Старший (знаковый) бит результата y выводится через любой I/O пин на один из входов силового ключа, а оставшиеся 7 бит (последний бит зануляется) безо всякого преобразования можно загружать в регистр формирования отсечки для ШИМ.
Для управления двигателями, у которых скорость должны оставаться, а на двигатель действуют разные силы (разное сопротивление воздуха (вентиляторы), разные нагрузки на шпинделе, салазках и т.д.) часто (но не всегда) используется ПИД регулирование – всегда с использованием датчика:
П- пропорциональный;
И-интегральный;
Д-дифференциальный.
Это три разных преобразования сигнала, которые в сумме дают единое преобразование-усиление. Имеется два варианта реализации:
управляющий контроллер со встроенным ПИД и ШИМ (чаще) (когда до 3 привода);
управляющий контроллер плюс микроконтроллер в режиме драйвера (только ПИД и ШИМ) (когда много приводов – для каждого делается драйвер)
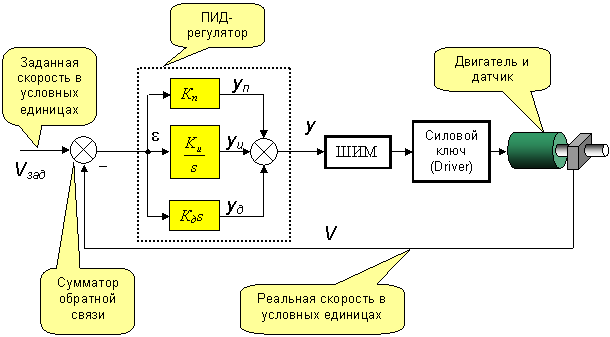
Рисунок 1.13 – Схема мехатронного модуля с широтно-импульсной модуляцией
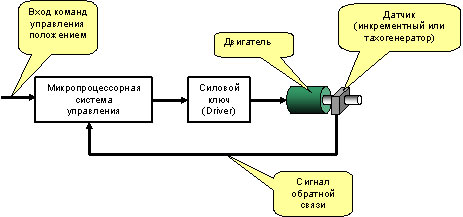
Рисунок 1.14 – Схема мехатронного модуля с широтно-импульсной модуляцией от микропроцессорной системы
Силовой ключ – два моста, которые соответственно задают направление вращения двигателя, включают и останавливают его (01 вперед, 10 – назад, 11 и 00 – останов)
На рисунке 1.15 показана схема ПИД-регулятора на базе микропроцессора AVR для управления приводом подачи резца.
В системе с ПИД-регулятором реальная скорость V(t) двигателя измеряется с помощью датчика.
На вход системы поступает заданное значение скорости Vзад(t) в тех же единицах, что и реальная скорость.
Сумматор обратной связи вычитает из сигнала задания на скорость Vзад(t) сигнал реальной скорости V(t) и формирует на выходе сигнал ошибки :
![]() (1.1)
(1.1)
Сигнал ошибки поступает на пропорциональное, интегральное и дифференциальное звенья ПИД-регулятора.
Системы с ПИД-регуляторами в настоящее время реализуются только цифровыми, а расчет законов управления выполняется дешевыми микропроцессорами серии AVR или MCS-51. Заметим, что микропроцессоры целочисленные и не поддерживают операций с плавающей запятой. Это требует от программиста соответствующей адаптации алгоритмов.
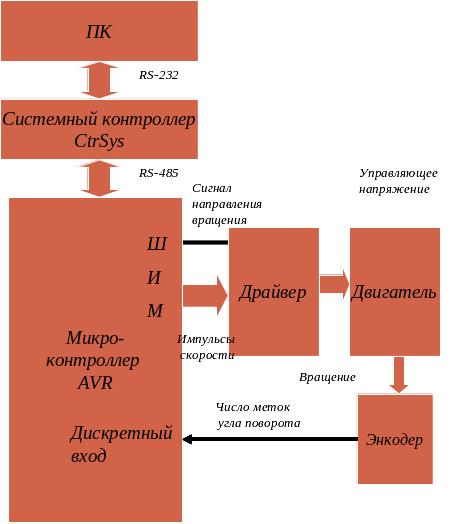
Рисунок 1.15 - Схема ПИД-регулятора на базе микропроцессора AVR для управления приводом подачи резца
В системе с ПИД-регулятором скорость двигателя измеряется с помощью датчика ( в примере – энкодер). Реальная скорость измеряется в целочисленных условных единицах скорости. Обычно условные единицы скорости подбирают таким образом, чтобы скорость в у.е. изменялась в диапазоне от -127 до 127 (один байт), в крайнем случае от -15 до 15 (скорость берут с запасом). Но в любом случае, количество дискрет скорости не должно быть меньше требуемого числа скоростей.