

Группы характеристик микропроцессоров, определяющих её архитектуру:
характеристики и состав модулей базовой конфигурации МПС;
характеристики машинного языка и системы команд (количество и номенклатура команд, их форматы, системы адресации, наличие программно-доступных регистров в процессоре и т.п.), которые определяют алгоритмические возможности процессора МПС;
технические и эксплуатационные характеристики МПС;
состав программного обеспечения МПС и принципы его взаимодействия с техническими средствами МПС.
За счет исключения арифметических операций аппаратная сложность микроконтроллеров по сравнению с МП ниже, а функции логического управления более развиты. Микроконтроллеры применяются не только в составе микро ЭВМ как устройства управления, но и в системах передачи данных, системах управления технологическими процессами.
Микроконтроллеры являются сердцем многих современных устройств и приборов, в том числе и бытовых. Самой главной особенностью микроконтроллеров, с точки зрения конструктора-проектировщика, является то, что с их помощью легче и зачастую гораздо дешевле реализовать различные схемы.
Программируемые микроконтроллеры лишены недостатков схем управления с жесткой логикой, с жесткими электрическими связями и обеспечивают изменение программы функционирования с помощью встроенного или автономного устройства программирования, что предопределило их использование и для создания современных автоматизированных систем управления (АСУ) технологическими процессами. При этом отпадает необходимость в отключении технологического оборудования и исключаются трудоемкие и дорогостоящие процессы, связанные с перепроектированием систем управления.
Применение микроконтроллеров позволяет значительно снизить количество и стоимость используемых материалов и комплектующих изделий, что обеспечит снижение себестоимости конечной продукции. Использование микроконтроллеров может существенно увеличить привлекательность продукции для потребителя благодаря реализации «дружественного интерфейса» при относительно небольших дополнительных затратах. Обеспечивается также возможность расширения области применения выпускаемой продукции путем использования одних и тех же аппаратных средств, с разнообразным программным обеспечением, специализированным для реализации различных функций.
Микроконтроллер в общем виде - это самостоятельная компьютерная система, которая содержит процессор, вспомогательные схемы и устройства ввода-вывода данных, размешенные в общем корпусе. Общая структура микроконтроллера приведена на рисунке 1.10.
Применение микроконтроллеров позволяет значительно снизить количество и стоимость используемых материалов и комплектующих изделий, что обеспечит снижение себестоимости конечной продукции. Обеспечивается также возможность расширения области применения выпускаемой продукции путем использования одних и тех же аппаратных средств, с разнообразным программным обеспечением, специализированным для реализации различных функций.
Микроконтроллер легко сопрягается с другими устройствами. Различные датчики, сигналы которых используются для управления техническими устройствами (переключатели, потенциометры, термодатчики, датчики давления, фотодиоды и т. д.), подключаются к порту ввода (цифровому или аналоговому). Исполнительные приборы и механизмы (электродвигатели, обмотки реле и соленоидов, электролампы, светодиоды и т. п.) подключаются к порту вывода.
Подключение каждого из этих устройств к портам микрокомпьютера осуществляется через интерфейс. Интерфейс располагается между двумя и более устройствами и осуществляет согласование форматов сигналов.
Неотъемлемой частью управления промышленным оборудованием от микроконтроллеров является мониторинг состояния технологического процесса. Основными устройствами для мониторинга различных параметров или состояния процессов являются датчики. Они, преобразуют измерительный параметр в выходной сигнал, который можно измерить и оценить количественно. Таким образом, датчики являются своего рода органами чувств современной техники.
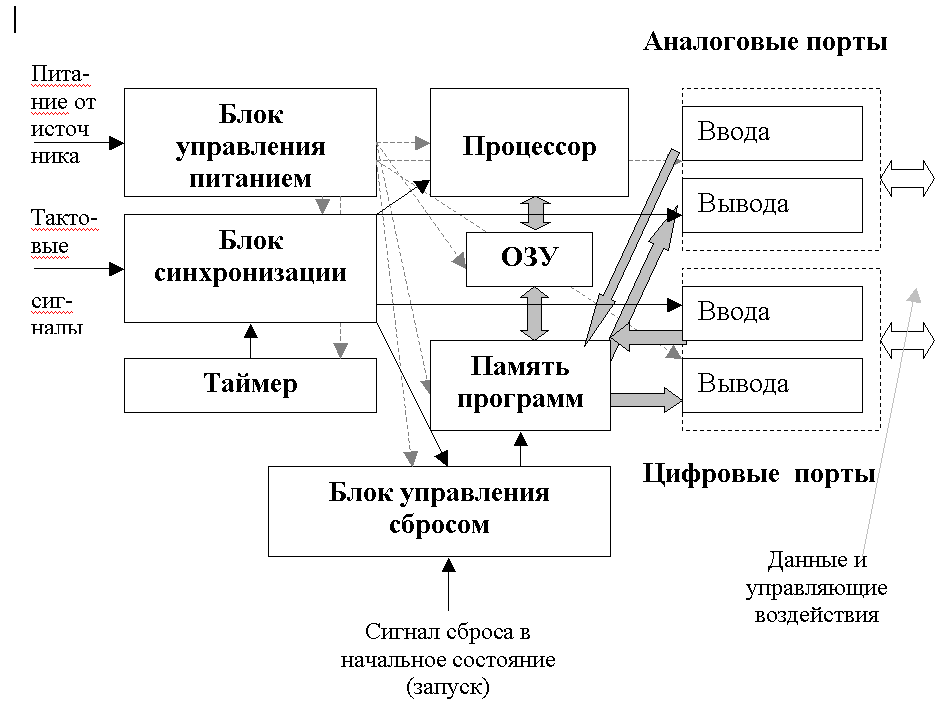
Рисунок 1.10 - Общая структура микроконтроллера