

Лабораторная работа № 1-5 (др
.).doc
М инистерство
образования РФ
инистерство
образования РФ
Рязанская государственная радиотехническая академия
Кафедра ОиЭФ
Лабораторная работа № 1-5
«ИССЛЕДОВАНИЕ ПРЕЦЕССИИ СВОБОДНОГО ГИРОСКОПА»
Выполнил ст. гр. 255
Ампилогов Н. В.
Проверил
Малютин А. Е.
Рязань 2002
Цель работы: изучение устройства и движения гироскопа под действием момента внешних сил; определение частоты оборотов ротора и момента сил трения в его подшипниках.
Приборы и принадлежности: гироскоп кардановый подвес, набор сменных грузов, секундомер, стробоскоп частотомер.
Элементы теории
Г ироскоп
это – симметричное быстро вращающееся
твёрдое тел, ось которого может изменять
своё положение в пространстве. Для того,
что бы гироскоп свободно мог изменять
положение своей оси в пространстве, его
закрепляют на кардановом подвесе.
Подобный способ крепления гироскопа
схематично изображен с помощью векторной
схемы на рис.1. Где аа
– вертикальная ось вращения; бб
– горизонтальная ось вращения; вв
– ось вращения самого гироскопа; O
– центр масс гироскопа. Из рисунка
видно, что при повороте вокруг любой
оси гироскоп сохраняет своё положение
в пространстве (т.к. в точке все три оси
вращения пересекаются в точке O).
Такой гироскоп называется свободным.
ироскоп
это – симметричное быстро вращающееся
твёрдое тел, ось которого может изменять
своё положение в пространстве. Для того,
что бы гироскоп свободно мог изменять
положение своей оси в пространстве, его
закрепляют на кардановом подвесе.
Подобный способ крепления гироскопа
схематично изображен с помощью векторной
схемы на рис.1. Где аа
– вертикальная ось вращения; бб
– горизонтальная ось вращения; вв
– ось вращения самого гироскопа; O
– центр масс гироскопа. Из рисунка
видно, что при повороте вокруг любой
оси гироскоп сохраняет своё положение
в пространстве (т.к. в точке все три оси
вращения пересекаются в точке O).
Такой гироскоп называется свободным.
Движение гироскопа описывается уравнением:
-
 ,
где
,
где
 - момент импульса гироскопа относительно
точки пересечения осей;
- момент импульса гироскопа относительно
точки пересечения осей;
 -
момент внешних сил относительно точки
O.
-
момент внешних сил относительно точки
O.
Дальнейшие выводы будут делаться непосредственно с использованием векторной схемы приведённой на рис.1.
Пусть
дано: M
= 0, а 0
- угловая скорость вращения гироскопа.
Тогда L
J00
= const, где
J0
– момент
инерции гироскопа относительно оси
вращения вв.
Теперь если к оси гироскопа приложить
внешнюю силу
![]() ,
то возникнет момент силы
,
то возникнет момент силы
![]() ,
лежащий в горизонтальной плоскости. Из
выражения (1) следует, что векторы
,
лежащий в горизонтальной плоскости. Из
выражения (1) следует, что векторы
![]() и
и
![]() ортогональны. За промежуток времени dt
вектор
ортогональны. За промежуток времени dt
вектор
![]() получает приращение
получает приращение
![]() ,
направленное так же, как и вектор
,
направленное так же, как и вектор
![]() ,
поэтому сила
,
поэтому сила
![]() заставляет описывать гироскоп окружность
в горизонтальной плоскости, не изменяя
при этом величину
заставляет описывать гироскоп окружность
в горизонтальной плоскости, не изменяя
при этом величину
![]() .
.
Проекция
вектора
![]() на горизонтальную плоскость за время
dt
повернётся на угол d,
причём:
на горизонтальную плоскость за время
dt
повернётся на угол d,
причём:
-
dL = Lsind,
учитывая (1), выражение (2) можно переписать так:
-
Lsind = Mdt, где - угол, который вектор
 составляет с вертикалью.
составляет с вертикалью.
Если
учесть, что угловую скорость вращения
вектора
![]() вокруг оси аа
находится по формуле
вокруг оси аа
находится по формуле
![]() ,
то из (3) можно выразить :
,
то из (3) можно выразить :
-
 .
.
В векторной форме выражение (4) записывается следующим образом:
-
 .
.
Таким
образом, на основании (5) можно утверждать,
что под действием момента внешних сил
![]() ось гироскопа вращается вокруг
вертикальной оси с угловой скоростью
,
описывая в пространстве конус. Так как,
вектор
ось гироскопа вращается вокруг
вертикальной оси с угловой скоростью
,
описывая в пространстве конус. Так как,
вектор
![]() не меняет своего положения относительно
вектора
не меняет своего положения относительно
вектора
![]() с течением времени, то вращение оси
гироскопа при постоянной силе
с течением времени, то вращение оси
гироскопа при постоянной силе
![]() является равномерным. Такое вращение
называется регулярной прецессией
гироскопа, а
- угловой скоростью прецессии.
является равномерным. Такое вращение
называется регулярной прецессией
гироскопа, а
- угловой скоростью прецессии.
Если ось гироскопа расположена горизонтально (рис. 2), то уравнение (2) примет вид:
-
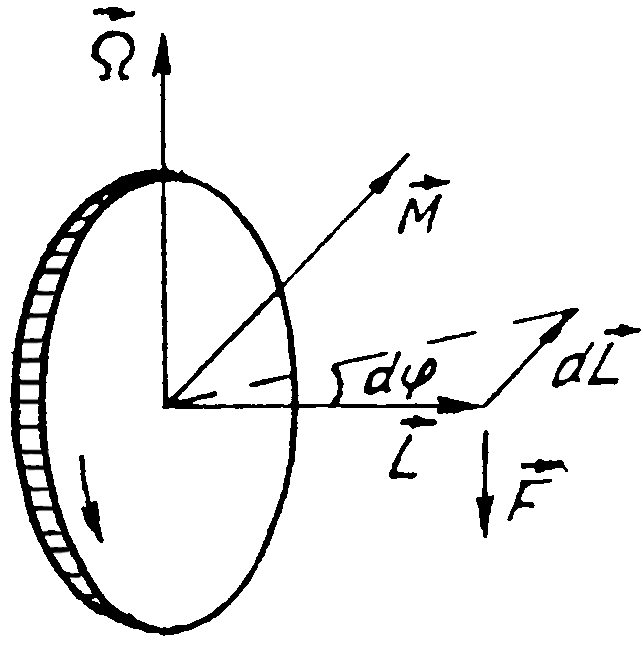
Рис. 2
.
Следует иметь в виду, что все приведённые рассуждения справедливы лишь для быстро вращающегося гироскопа, т.е. при
-
0 >> .
Тогда можно считать, что L J00, где J0 – момент инерции гироскопа относительно его собственной оси вращения; 0 – угловая скорость данного вращения. Тогда выражение (4) примет вид:
-
 .
.
При = /2, получаем
-
 .
.
При изучении прецессии гироскопов подобных конструкций следует учитывать силы возникающие в гироскопических подшипниках. Несмотря на то, что данные силы весьма молы, они приводят к усложнению прецессии. Именно из-за их действия ось ротора гироскопа при его вращении медленно наклоняется.
В данной работе требуется определить частоту оборотов ротора гироскопа по его регулярной прецессии и рассчитать момент сил трения в его подшипниках.
Из (9) следует, что:
-
 ,
где M
– момент
внешних сил, задаваемый неким грузом
P;
M
= pl
= mgl;
J0
- момент
инерции ротора;
- угловая скорость прецессии; l
– плечо
момента силы M;
p
– сила
тяжести груза P,
создающего
момент M.
,
где M
– момент
внешних сил, задаваемый неким грузом
P;
M
= pl
= mgl;
J0
- момент
инерции ротора;
- угловая скорость прецессии; l
– плечо
момента силы M;
p
– сила
тяжести груза P,
создающего
момент M.
При M =const, угловая скорость прецессии тоже будет постоянной и её можно найти измеряя время совершения ротором N-ого числа оборотов:
-
 .
.
Частота вращения ротора равна:
-
 .
.
Сняв груз P и измерив время с момента выключения питания мотора до его полной остановки, т.е. время выбега tв, можно, применив (1), найти момент сил трения в подшипниках ротора:
-
 .
.
Расчётная часть
|
Физ. Величины |
Опыты |
||
|
1 |
2 |
3 |
|
|
Исходные данные |
|
||
|
m (масса груза P), кг |
0,32 |
||
|
L (плечо силы), м |
5,510-2 |
||
|
J0 (момент инерции ротора гироскопа), кгм2 |
3810-3 |
||
|
Опытные данные |
|
||
|
N (число оборотов оси гироскопа) |
2 |
||
|
t (время прецессии), с |
270 |
250 |
265 |
|
tв(время выбега), с |
450 |
451 |
455 |
|
ni (число оборотов ротора в минуту), об/мин |
932,4 |
863,4 |
915 |
|
Mтрi (момент сил трения в подшипниках), Нм 10-3 |
8,24 |
7,61 |
8 |
Последовательно найдём искомые величины, рассматривая экспериментальные данные 1-ого опыта.
Найдём число оборотов ротора гироскопа в минуту (n). Для этого по формуле (12) рассчитаем частоту оборотов ротора (n0).
![]() Гц.
Гц.
При n01 = 15,54 Гц., n1 = 932,4 об/мин.
По формуле (13) найдём момент сил трения в подшипниках карданового подвеса гироскопа.
![]() Нм.
Нм.
Аналогично найдём значения ni и Mтрi для опытов 2 и 3.
К опыту 2:
![]() Гц.
n2
= 863,4 об/мин.
Гц.
n2
= 863,4 об/мин.
![]() Нм.
Нм.
К опыту 3:
![]() Гц.
n13
= 915 об/мин.
Гц.
n13
= 915 об/мин.
![]() Нм.
Нм.
Найдём
действительные значения величин
![]() и
и
![]() ,
как средние арифметические значения
соответствующих величин (ni
и Mi).
,
как средние арифметические значения
соответствующих величин (ni
и Mi).
![]() ;
;
![]() об/мин.
об/мин.
![]() ;
;
![]() Нм.
Нм.
Найдём
абсолютные погрешности вычисления
данных величин (![]() и
и
![]() ).
).
Так
как, данные действительные значения
величин найдены от i-ого
значения аналогичных косвенных величин,
то абсолютные погрешности данных величин
целесообразно искать по соответствующим
формулам ((12) для ni
и
(13) для
Mтрi),
подставляя в них вместо i-тых
значений измеряемых величин (t
и tв),
действительные значения величин (![]() и
и
![]() ),
найденных прямыми измерениями.
),
найденных прямыми измерениями.
![]() ;
;
Погрешность
![]() найдем через дифференциал изображённой
выше формулы по dt:
найдем через дифференциал изображённой
выше формулы по dt:
![]() ;
при tс
= 4,30 (для n
= 3).
;
при tс
= 4,30 (для n
= 3).
Для
нахождения значения
![]() найдём среднеквадратичную погрешность
величины t
(t):
найдём среднеквадратичную погрешность
величины t
(t):
![]()
![]()
 ,
при (число
измерений
(опытов))
n
= 3; k = 1,1 (для
P =
0,95), c
= 1 с.
,
при (число
измерений
(опытов))
n
= 3; k = 1,1 (для
P =
0,95), c
= 1 с.
Действительное
значение
![]() найдём,
как среднее арифметическое значение
от ti.
найдём,
как среднее арифметическое значение
от ti.
![]() ;
;
![]() c.
c.
![]() c.
c.
При
данном значении t
можно найти
![]() .
.
![]() ;
;
![]() ;
;
![]() об/мин.
об/мин.
![]() об/мин.
об/мин.
Аналогичным
способом найдём абсолютную погрешность
измерения момента сил трения в подшипниках
(![]() ).
).
![]() ;
;
Погрешность
![]() найдем через дифференциал изображённой
выше формулы по dt
и по dtв:
найдем через дифференциал изображённой
выше формулы по dt
и по dtв:
 ;
при tс
= 4,30 (для n
= 3).
;
при tс
= 4,30 (для n
= 3).
Для
нахождения значения
![]() (при известной t)
найдём среднеквадратичную погрешность
величины tв
(tв):
(при известной t)
найдём среднеквадратичную погрешность
величины tв
(tв):
 ,
при (число
измерений
(опытов))
n
= 3; k = 1,1 (для
P =
0,95), c
= 1 с.
,
при (число
измерений
(опытов))
n
= 3; k = 1,1 (для
P =
0,95), c
= 1 с.
Действительное
значение
![]() найдём,
как среднее арифметическое значение
от ti.
найдём,
как среднее арифметическое значение
от ti.
![]() ;
;
![]() c.
c.
![]() c.
c.
![]()
При
данном значении tв
можно найти
![]() .
.
![]() ;
;
![]() ;
;
 ;
;
 Нм.
Нм.
Итого:
![]() об/мин.
об/мин.
![]() Нм.
Нм.
-