

ОБЩИЕ УКАЗАНИЯ
Ускорение научно - технического прогресса, интенсификация производства требуют опережающего развития средств автоматизации и роботизации, создания гибких технологических линий, участков и цехов.
Реализация программы роботизации в значительной степени определяется уровнем разработки информационного обеспечения /ИО/ робототехнических систем /PC/, ответственного в общем случае за выполнение таких важнейших функций, как ориентация во времени и пространстве, решение задач распознавания, выполнение заданных перемещений в изменяющейся среде, манипулирование с указанными объектами, отображение среды и поведения робота.
До настоящего времени задача роботизации производства решалась в основном в плоскости количественного наращивания роботов - манипуляторов, функционирующих в рамках жестких пространственно - временных ограничений. Ожидать существенного повышения производительности труда в таких условиях не приходилось.
Задача настоящего этапа развития роботизации - качественно изменить спектр выполняемых функций, расширить этот спектр на класс "интеллектуальных" задач.
Ключевыми моментами развития PС на данном этапе являются расширение спектра воспринимаемой входной информации, повышение мощности ее переработки, улучшение сервисных возможностей общения с оператором с целью повышения гибкости управления. Все это - главные составляющие информационного обеспечения робототехнических систем.
Цель настоящего лабораторного цикла - проанализировать структуру информационного обеспечения автономного робота, определить узловые моменты переработки информации, смоделировать отдельные подсистемы информационного обеспечения.
Анализ информационного обеспечения робототехнических систем выполняется на путях имитационного моделирования, реализованы модели на СМ - 4 /язык ФОРТРАН - IУ/, ОС-РВ.2.
Концепция имитационного моделирования применительно к сформулированным задачам означает построение моделей как собственно автономного робота /АР/, так и среды его функционирования. Модель робота, разрабатываемая на самом общем уровне и с учетом концепций антропоморфизма, должна отражать наиболее существенные формы поведения человека, такие как ориентация, перемещение, распознавание, общение. Информационная модель автономного робота показана на рис. I.
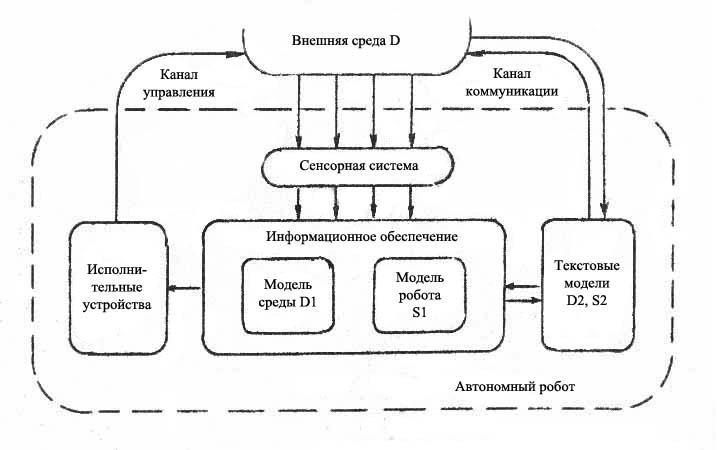
Рис. I. Общая структура автономного робота
Согласно формирующимся в настоящее время представлениям необходимыми компонентами АР должны быть цепи обратной связи, замыкающиеся через внешнюю среду. Для "интеллектуальных" структур помимо этого характерно наличие внутренних моделей, как внешней среды, так и собственно робота. Предложенная структура удовлетворяет современным концепциям.
Информация о внешней среде D воспринимается сенсорной системой, на выходе которой формируется модель среды D1. С учетом данной модели, а также модели собственно робота S1 ИО решает необходимые задачи, обеспечивая воздействие робота на внешнюю среду по двум направлениям. Канал управления /КУ/ определяется моторикой робота и реализуется через его манипуляторы или другие исполнительные устройства; коммуникативный канал - это канал информационный, обеспечивающий общение автономного робота или "интеллектуальной" структуры с разумными представителями внешней среды /оператором, настройщиком и т.п./ или с подобными себе структурами. Выходная информация канала коммуникации задается в языковой форме и представляет собой текст, отображающий в заданный момент времени состояние среды, поведения состояние робота. D2 - описание среды; S2 - описание АР; D2 и S2 в информационном плане тождественны D1 и S1 соответственно, однако формы представления существенно различны. Если D1 и S1 представлены в графическом виде, то D2 и S2 оказываются их текстовой интерпретацией. Принципиальным моментом представленной структуры является наличие моделей D1 и S1 , что позволяет процесс решения задач выполнять в рамках модели D1, не контактируя непосредственно с внешней средой. После решения задачи и оценки результатов разрешается выход в действительность через систему принятия решений. Модель действительности определяется следующими рамками.
Действительность, в которой функционирует АР, ограничивается плоской сценой прямоугольной формы размером m * n.
Данная сцена заполнена множеством плоских объектов различной геометрической формы /пример сцены показан на рис. 2/. Здесь S - собственно робот; F - направление восприятия среды роботом; I-7 – типы геометрических объектов, заполняющих сцену.
Робот S характеризуется следующими параметрами:
XS, YS - текущие параметры -/координаты/ робота на сцене;
Fi - текущее направление восприятия среды /этим имитируется наличие зрения АР/;
L - шаг перемещения робота по расстоянию /предполагается, что робот может перемещаться пошагово/;
ΔFS - шаг перемещения по направлению /допускается вторая степень свободы - вращение относительно положения АР/;
Р - габаритные размеры робота /предполагается, что АР - это мобильный робот, способный перемещаться/; в общем случае Р - варьируемый параметр.
ДАЛЕКО
ВПЕРЕДИ
СЛЕВА НЕДА
СПРАВА
ПОЗАДИ







Рис. 2. Модель сцены с нанесенной сеткой анализируемых отношений расстояния и направления.
4. Модель действительности /сцена/ в виде двумерного массива размером m*n введена в вычислительную среду, где моделируется поведение АР, Наличие объектов и собственно робота отображается путем соответствующего кодирования необходимых элементов массива.
Предложенная модель автономного робота обладает следующими функциональными возможностями: АР воспринимает информацию о внешней среде, анализирует ее /выполняя процедуры распознавания/, принимает и отрабатывает команды оператора, формирует отчет о состоянии среды и своем поведении.
В рамках предложенной структуры ИО моделируются четыре подсистемы, входящие в состав модели АР: ориентации, перемещения, распознавания и отображения. Перечисленные подсистемы позволяют проследить основные моменты переработки информации в робототехнических системах. Это минимальная конфигурация информационного обеспечения, которая гарантирует работу робота в автономном режиме. Общим связующим звеном всех подсистем является единая система представления знаний и общая модель внешней среды, в пределах которой выполняются все построения. Более детально структура информационного обеспечения автономного робота показана на рис. 3.

 Следует
различать в ИО два уровня представления
и обработки информации, соответствующие
закономерностям функционирования I и
II сигнальных систем. В рамках I сигнальной
системы отображение и обработка
осуществляются на образном уровне,
тогда как во II сигнальной системе
информация представлена в текстовом
виде и процессы реализуются на символьном
уровне.
Следует
различать в ИО два уровня представления
и обработки информации, соответствующие
закономерностям функционирования I и
II сигнальных систем. В рамках I сигнальной
системы отображение и обработка
осуществляются на образном уровне,
тогда как во II сигнальной системе
информация представлена в текстовом
виде и процессы реализуются на символьном
уровне.
Соотношение между I и II сигнальными системами является узловой проблемой человеческого интеллекта, и никакое моделирование не может быть выполнено убедительно без учета этого соотношения, В данном лабораторном цикле предпринята попытка моделирования указанного соотношения в рамках очень ограниченной модели внешнего мира.
На уровне обработки образной информации / в системе рассматривается лишь вход зрительного анализатора/ следует различать такие этапы:
формирование модели действительности и модели робота / D1, S1 /;
решение задачи фон (фигура, которая заключается в выделении из множества отдельных объектов);
формирование описаний отдельных объектов с учетом их информативных признаков;
идентификация описаний объектов действительности с описаниями объектов, хранящихся в системе представления знаний /СПЗ/ АР.
На уровне обработки символьной информации наиболее важными являются вопросы:
закономерности формирования текста как описания действительности в. целом;
закономерности формирования описания отдельной ситуации как отображения триединства времени, пространства и движения;
закономерности организации грамматики при формировании описания отдельной ситуации и текстов в целом;
закономерности формирования понятийного аппарата системы.
Здесь затронуты наиболее существенные вопросы формирования и взаимодействия I и II сигнальных систем, ответственных за функционирование АР в целом. Предложенная структура достаточно полно охватывает задачи, связанные с моделированием соотношения этих систем, и важна как для квалифицированной постановки задач, так и для объективной оценки того, что сделано на этом пути. Анализируемые отдельные фрагменты ИО должны оцениваться с позиций их вклада в решение общей задачи моделирования поведения человека.


 Внешняя
среда
Входной
текст
Внешняя
среда
Входной
текст





Анализаторы входной
инф-и
Обработка информации
Анализатор-синтезатор
текстовой информации
Модели
действительны






Выделение
объктов

Образы
П-отношений
п/с
отношений
Имена отношений



Формир. описания
объктов
Образы объектов
п/с
объектов
Имена объектов


Динамич. состояние
п/с
состояний
Имена состояний
Система
распознавания




Сис-ма принятия
решений


В канал управления В канал коммуникации
Менее разработана в общей схеме ИО центральная часть, связующая воедино образную и символьную информации. Функционально эта часть ответственна за процесс переработки информации в общем виде и обеспечивает организацию поведения индивидуума в целом. Используя современную терминологию, ее можно считать "центральным процессором" живого организма. В настоящей работе опускаются из рассмотрения такие функции, как построение плана действий, принятие решений и т.п.
Центральная часть ИО устанавливает соответствие между элементами I и II сигнальных систем; при этом определенным образным элементам I сигнальной системы должны сопоставляться отдельные лексические составляющие II сигнальной системы.
Фрагмент ИО, содержащий уровни графического /образного/ и символьного представлений совместно с заданными процедурами соответствия имеет вид модели системы представления знаний человека. В отличие от традиционного подхода, где наполнением СПЗ служит языковое отображение тех или иных закономерностей внешней действительности, предлагаемая структура одновременно охватывает и образную форму представления знаний. На схеме ИО /рис.3, пунктирная линия/ СПЗ включает в себя представление информации, как на графическом, так и на языковом /символьном/ уровне. Элементами связи между различными формами представления информации являются процедуры соответствия /ПС/.
К особенностям предложенной схемы следует отнести возможность переработки информации в двух направлениях: СИЗ может функционировать либо в режиме отображения действительности, когда по D1 генерируется текстовая информация D2, либо в режиме восприятия /понимания/ текста, когда по тексту синтезируется некоторый фрагмент на D1, в котором АР должен выполнять определенные действия и построения.
В лабораторной работе №5 анализируется процесс переработки информации в направлении "Действительность - Текст", а лабораторная работа №2 посвящена анализу переработки в направлении "Текст - Действительность", где по заданному входному тексту генерируется некоторый фрагмент сцены. В лабораторной работе №3 отражены вопросы синтеза алгоритмов перемещения робота в различных условиях /будь то лабиринтные задачи или перемещение на сцене, заполненной препятствиями/. Лабораторная работа №4 связана с исследованием распознающих систем, обеспечивающих функционирование робота в автономном режиме. Работа №I посвящена вопросам анализа отдельных фрагментов СПЗ, ответственных за функцию ориентации АР.
Рассмотренные общие положения, касающиеся данного цикла лабораторных работ в целом, необходимы для выполнения каждой работы. Более детальное описание отдельных этапов обработки информации приведено в конкретных лабораторных работах. При разработке и подготовке настоящего лабораторного цикла активное участие принимали студенты факультета систем управления В. Цокол, Б. Груцельска, М. Глядко.
Лабораторная работа № I
ИССЛЕДОВАНИЕ СИСТЕМЫ ПРЕДСТАВЛЕНИЯ ЗНАНИЙ
Цель работы - исследовать общую структуру СПЗ АР, проанализировать фрагмент СПЗ, ответственный за отображение пространственных отношений,
I.I. Общие положения
АР, точнее его модель, обладает возможностью воспринимать информацию о внешней среде, анализировать ее, принимать решения, формировать отчет о своем поведении. .
Выполнение подобных операций поддерживается СПЗ, состоящей из трех фрагментов /деление по вертикали/: СПЗ - отношений, СПЗ - объектов, СПЗ - состояний. Структурно каждый из этих фрагментов /деление по горизонтали/ содержит единицы трех типов: элементы графические /образные/, лексические и процедуры соответствия. Необходимо последовательно проанализировать каждый фрагмент СПЗ.
СПЗ - отношений ответственна за восприятие и отображение пространственных отношений и в общем случае управляет процедурами ориентации и перемещения АР. Фрагмент СПЗ, задающий пространственные отношения, представлен на рис. 1.1 /там же приведена их графическая и лексическая интерпретация/.
Образные элементы СПЗ связаны со средой функционирования робота /в данном случае сценой/ и представляют собой набор базовых пространственных отношений /П - отношений/, в некотором смысле эквивалентных понятиям, используемым человеком при решении задач ориентации и перемещения в адекватных условиях. Все образные элементы СПЗ формируются относительно модели робота и составляют два класса. Элементы первого класса выполняют разбиение пространства относительно направления восприятия сцены роботом /направление F/, тогда как элементы второго класса выполняют разбиение пространства, сцены по признаку удаления от положения робота Si. Графическим элементам первого класса /типа НАПРАВЛЕНИЕ/ соответствуют лексические элементы ВПЕРЕДИ, СЛЕВА, СПРАВА и т.п., а образным элементам второго класса /типа РАССТОЯНИЕ/ можно соотнести имена ВБЛИЗИ, НЕДАЛЕКО и пр. Комбинация элементов названных типов на образном уровне позволяет сформировать произвольное П - отношение, покрывающее весь спектр отношений, используемых человеком в задачах ориентации и перемещения /на лексическом уровне/. В предлагаемой системе представления знаний значение термина /в отличие от традиционной семантики/ определяется не через другие термины, а задается его графическим образом, т.е. "изобразительными средствами" семантики [1]



|
|
|
|
|
|
ВПЕРЕДИ |
СЛЕВА |
ПОЗАДИ |
СПРАВА |
СБОКУ |
ПРЯМО |
|
|
|
|
|
|
ВОЗЛЕ |
ОКОЛО |
ВБЛИЗИ |
НЕДАЛЕКО |
ДАЛЕКО |
ЗА ПЕРЕД |













Рис. I.I. Базовые отношения категории пространства:
а - базовые элементы пространственных отношений типа НАПРАВЛЕНИЕ,
б - базовые элементы категории РАССТОЯНИЕ;
S - положение робота; F - направление восприятия среды
Приведенная интерпретация пространственных отношений на графическом уровне - лишь одна из возможных и в общем случае зависит от ряда субъективных факторов, следствием чего является принадлежность графических элементов СПЗ к классу "нечетких" множеств /терминология Л.Заде [2]/ Отсюда вытекает, что границы образных элементов, зафиксированных на рис. I.I,- подвижны и изменчивы. Принятая в настоящей работе интерпретация базовых элементов удовлетворяет двум условиям: условию полноты покрытия отображаемого пространства /сцены/ и условию минимального перекрытия отдельных графических представлений /принят случай нулевого перекрытия/. Кроме того, при формировании СПЗ обеспечена инвариантность графических коррелятов пространственных отношений относительно размеров сцены и произвольного перемещения робота.
Система предоставления знаний включает в себя /см. рис.3/ и ПС, связывающие графический уровень с лексическим. Эти процедуры по лексическим элементам формируют соответствующие графические /образные/ представления в рамках принятой модели действительности. Для фрагмента СПЗ, ответственного за отображение пространственных отношений, сгенерированы процедуры соответствия для всех 13 элементов П - отношений /см. рис. I.I/. При формировании процедур обеспечена инвариантность их к произвольному перемещению АР.
№ |
Объект |
Тип отношений |
||||||
Рядом |
Недалеко |
Далеко |
Впереди |
Слева |
Позади |
Справа |
||
1 |
Треугольник |
|
|
100 |
|
100 |
|
|
2 |
Ромб |
|
70 |
30 |
85 |
15 |
|
|
3 |
Квадрат |
|
22 |
78 |
45 |
|
|
55 |
4 |
Круг |
25 |
75 |
|
|
100 |
|
|
5 |
Круг |
|
20 |
80 |
|
60 |
40 |
|
6 |
Квадрат |
|
|
100 |
|
|
100 |
|
7
|
Ниша |
|
50 |
50 |
|
|
40 |
60 |
Таблица I.I
Третий фрагмент СПЗ связан с отображением состояний. Если первые два фрагмента ответственны за отображение статической информации /статической картины мира/, последний определяет динамические процессы действительности. В настоящей работе лексический состав элементов подобного рода пока весьма ограничен и содержит такие понятия, как ПЕРЕМЕСТИТЬСЯ, ПЕРЕМЕСТИТЬ, ОБОЙТИ, РАСПОЗНАТЬ. Данные имена сопоставлены с процедурами соответствия, реализованными программно; образная часть представляет собой отображение некоторого процесса, развернутого во времени, т.е. динамику состояния cреды.
Важно отметить одну особенность предложенной структуры СПЗ: процедуры соответствия в общем случае выполняют преобразование "Действительность - Текст" /в том или ином направлении/ и, естественно, являются недостающим звеном преобразования "Действительность - Смысл - Текст", т.е. служат смысловой интерпретацией отдельных фрагментов действительности и их составляющих - объектов, отношений и состояний. Это касается лишь аспектов образного мышления. В случае пространственных отношений процедуры соответствия являются толкованием соответствующих лексических - единиц и позволяют реконструировать на сцене отношения, заданные текстовой информацией; в случае отображения состояний на сцене реконструируются /отображаются/ соответствующие динамические ситуации. Вероятно, такая семантическая интерпретация соответствующих лексических единиц предельно "глубока", ибо не может быть толкования глубже самой действительности.
Отдельные процедуры соответствия СПЗ взаимосвязаны и более простые из них могут входить в состав сложных. Например, процедура, ответственная за реализацию программы перемещения, включает в себя многократное обращение к отдельным процедурам соответствия системы пространственных отношений.
Наполнение СПЗ модели АР /на лексическом уровне/ показано в табл.1.2. Необходимо еще раз подчеркнуть, что за каждым именем стоит образная интерпретация и в системе имеются процедуры соответствия, реализующие переход от одного уровня к другому. Примеры процедур соответствия даны в приложении. Перечень подобных процедур определяется списком: ВПЕРЕДИ, СЛЕВА, СПРАВА, СЗАДИ, ВОЗЛЕ, ОКОЛО, НЕДАЛЕКО, ДАЛЕКО.
п/п |
Имена отношений |
Имена объектов |
Имена состояний среды |
I |
Впереди |
Треугольник |
Пусто |
2 |
Сзади /позади/ |
Ромб |
Непусто |
3 |
Слева |
Квадрат |
|
4 |
Справа |
Круг |
Имена состояний АР |
5 |
Сбоку |
Ниша |
Переместиться |
6 |
Прямо |
Объект |
Переместить |
7 |
Возле |
|
Находиться |
8 |
Около |
Имена признаков |
Распознать |
9 |
Вблизи |
Угол |
Описать |
10 |
Недалеко |
Длина |
|
11 |
Далеко |
Кривизна |
|
12 |
За |
|
|
13 |
Перед |
|
|
14 |
Впереди /на I шаг/ |
|
|
15 |
Впереди /на N шагов/ |
|
|
1.2.Программа работы
В лабораторной работе №I освещены вопросы анализа фрагмента СПЗ, ответственного за представление П - отношений. Состоит она из двух частей.