

Добавил:
Studfiles2
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:Лекция по прикладной механике 9.ppt
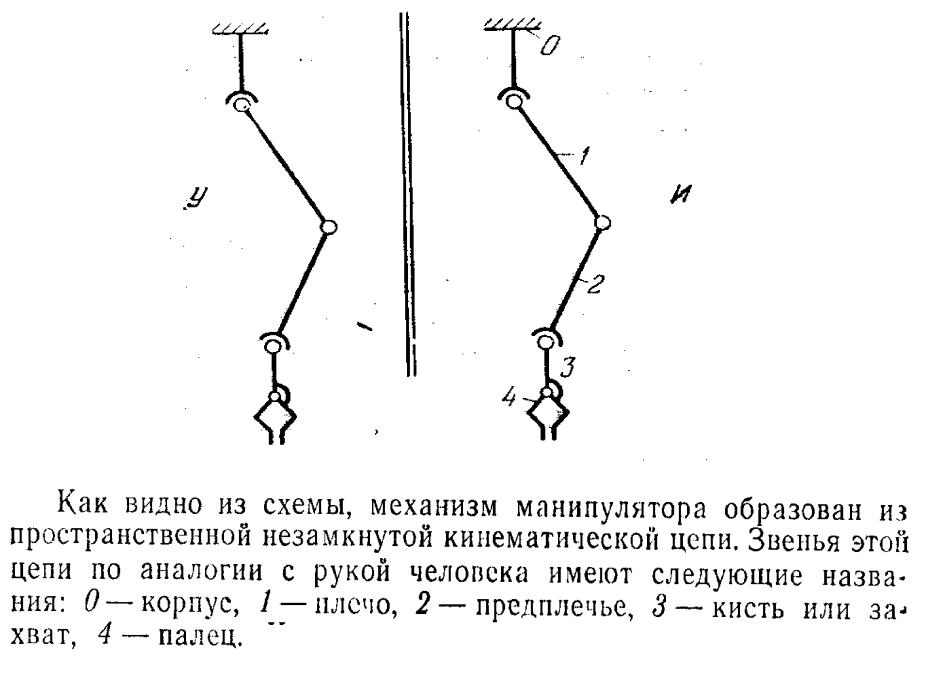
Рычажные механизмы с незамкнутыми кинематическими цепями
(манипуляторы и промышленные роботы)
Классификация и динамика манипуляторов


СУ с пассивным отражением сил
(дистанционное управление копирующим манипулятором)

СУ с активным отражением сил
(системы автоматического управления- Следящие системы)

Особенности структурного анализа и синтеза схем манипуляторов
Проблемы структурного синтеза манипуляторов, как пространственных открытых кинематических цепей, во многом отличаются от аналогичных проблем для замкнутых схем пространственных механизмов и тем более плоских.
Это связано с многовариантностью компоновки их схем и характером присоединения структурных групп.
Например ,манипулятор с W =3 можно реализовать с помощью следующих вариантов компоновки пар.
ВВВ, ВВП, ВПВ,ПВВ, ППВ, ПВП, ППП
В-вращающаяся пара
П- поступательная пара

ППП |
ВВВ |
|
W=3 |
W=3 |
М=0 |
М=0 |
1 |

ПВПВПВ |
СВС |
W=6 |
|
W=6 |
М=0 |
2 |
М=0 |
|
|

ППВВ
|
|
1 |
|
М= - |
ВСП |
М= -1
3
ВВПС
ВПВВВ
|
|
М= -1 |
|
М= -1 |
|||
|
|||
CCB
BCC
W=7 |
W=7 |
M=1 |
M=1 |
4