

Глава десятая двигатели постоянного тока
§ 10-1. Общие сведения о двигателях постоянного тока
Двигатели постоянного тока находят широкое применение в промышленных, транспортных и других установках, где требуется широкое и плавное регулирование скорости вращения (прокатные станы, мощные металлорежущие станки, электрическая тяга на транспорте и т. д.).
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого, параллельного, последовательного и смешанного возбуждения.
Схемы двигателей и генераторов с данным видом возбуждения одинаковы (рис. 9-1). В двигателях независимого возбуждения токи
якоря 1а и нагрузки / равны: / = 1а, в двигателях параллельного и смешанного возбуждения / = = /а + /,ив двигателях последовательного возбуждения / = 1а = /в. С независимым .возбуждением от отдельного источника тока обычно выполняются мощные двигатели с целью более удобного и экономичного регулирования
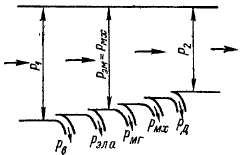
Рис 10-1 Энергетическая диаграмма двигателя параллельного возбуждения
величины тока возбуждения. По своим свойствам двигатели независимого и параллельного возбуждения почти одинаковы, и поэтому первые ниже отдельно не рассматриваются.
Энергетическая диаграмма двигателя параллельного возбужден ния изображена на рис. 10-1. Первичная мощность Рх является электрической и потребляется из питающей сети. За счет этой мощности покрываются потери на возбуждение рв и электрические потери рдла = PaRa в цепи якоря, а оставшаяся часть составляет электромагнитную мощность якоря РЭм = EJa, которая превращается в механическую мощность Рмх. Потери магнитные рмг, добавочные рд и механические р„х покрываются за счет механической мощности, а остальная часть этой мощности представляет собой, полезную механическую мощность Р2 на валу.
Аналогичные энергетические диаграммы, иллюстрирующие преобразование энергии в двигателе, можно построить и для других типов двигателей.
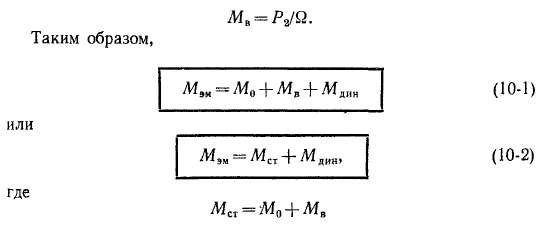
Уравнение вращающих моментов. Электромагнитный момент двигателя
который является движущим и действует в сторону вращения, расходуется на уравновешивание тормозящих моментов: 1) момента Мо, соответствующего потерям рш, рд и рмх, покрываемым за счет механической мощности [см. равенство (9-6)]; 2) Мв — момента нагрузки на валу, создаваемого рабочей машиной или механизмом; 3) Мта — динамического момента [см. равенство (9-7)]. При этом
является статическим моментом сопротивления.
При установившемся режиме работы, когда п = const и поэтому
В дальнейшем индекс «эм» у МЭм будем опускать. Обычно Мо мал по сравнению с Мв, и поэтому приблизительно можно считать, что при установившемся режиме работы Мэ„ = М является полезным моментом на валу и уравновешивается моментом Мв. Можно также величину Мо включить в величину Мв.
Укажем, что если выразить Р в кет, a Q — через число оборотов в минуту пн, то между Р, пм и М в кгс >м будет существовать зависимость
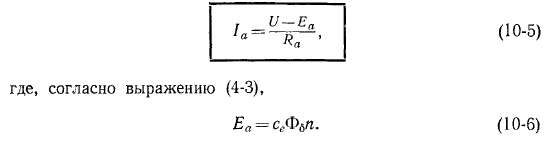
Уравнения напряжения и тока. В двигателях направление действия э. д. с. якоря Еа противоположно направлению тока якоря /о (см. § 1-1), и поэтому Еа называется также противоэлектродвижущей
![]()

![]()
силой якоря. Уравнение напряжения для цепи якоря двигателя можно записать следующим образом:
Здесь Ra — полное сопротивление цепи якоря [см. равенство (9-15)]. В режиме двигателя всегда U >> Еа. Из равенства (10-4) следует, что
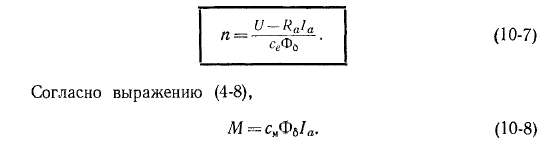
Скорость вращения и механические характеристики. Решая уравнение (10-4) совместно с (10-6) относительно п, находим уравнение скоростной характеристики п = f (Ia) двигателя:
Определив отсюда значение 1а и подставив его в (10-7), получим уравнение механической характеристики п = f (M) двигателя:
которое определяет зависимость скорости вращения двигателя от развиваемого момента вращения.
Вид механической характеристики п = f (М) или М = f (n) при U = const зависит от того, как с изменением нагрузки или М изменяется поток машины Фе, и различен для двигателей с различными способами возбуждения. Это же справедливо и для скоростных характеристик (см. § 10-4 — 10-6).


§ 10-2. Пуск двигателей постоянного тока
При пуске двигателя в ход -необходимо: 1) обеспечить надлежащую величину пускового момента и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря приключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
При п = 0 также Еа = 0 и, согласно выражению (10-5),
L=Ua/Ra. (10-10)
В нормальных машинах Ra^. — 0,02 -н 0,10, и поэтому при прямом пуске с U = Uu ток якоря недопустимо велик:
/в = (50ч-10)/н.
Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Ra относительно велико и поэтому при пуске la sg (4 ■*- 6) /н, а процесс пуска длится не более 1—2 сек.
Самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рис. 10-2).
При этом вместо выражения (10-5) имеем
где Rn — сопротивление пускового реостата, или пусковое сопротивление. Величина Rn подбирается так, чтобы в начальный момент пуска было 1а = (1,4 -г- 1,7) /н (в малых машинах до (2,0 4- 2,5) /н).
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рис. 10-2, а).
Перед пуском (t <; 0) подвижный контакт П пускового реостата стоит на холостом контакте 0 и цепь двигателя разомкнута. В начальный момент пуска (t = 0) подвижный контакт Я с помощью рукоятки переводится на контакт /, и через якорь пойдет ток /а, определяемый равенством (10-12). Цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д, по которой скользит
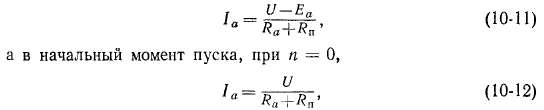
контакт Я, чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы iB и Фв при пуске были максимальными и постоянными, так как при этом, согласно выражению (10-8), при данных значениях 1а развивается
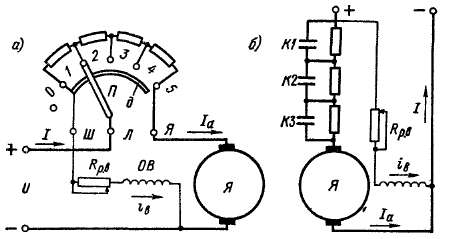
Рис 10-2 Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rp в = 0.
При положении контакта Я пускового реостата на контакте / (t = 0) возникают токи 1а и iB, а также момент М, и если М > Мст, то двигатель придет во вращение и скорость п будет расти со значения п — 0 (рис. 10-3). При этом в якоре будет индуктироваться э. д. с. Ег^п и, согласно выражениям (10-1J) и (10-8), 1а и М, а также скорость нарастания п будут уменьшаться. Изменение этих величин' при Мст = const происходит по экспоненциальному закону.
Когда 1а достигнет значения Л» мин = (Ы -*■ 1,3) /н, контакт Я пускового реостата переведется на контакт 2. Вследствие уменьшения Rn ток 1а ввиду малой индуктивности цепи якоря почти мгновенно возрастет, М также увеличится, п будет расти быстрее и в результате увеличения Еа величины 1а и М снова будут уменьшаться (рис. 10-3). Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигает установившегося режима работы со значениями /о и п, определяемыми условиями М=М„ [см. равенства (10-7) и (10-8)].
Рис 10-3 Зависимость 1ф М и п от времени при пуске двигателя
При пуске на холостом ходу М„ = Мо. Ток 1а — 1а0 в этом случае мал и составляет обычно 3—8% от /н.
Заштрихованные на рис. 10-3 ординаты представляют собой, согласно выражению (10-2), значения избыточного, или динамического, момента
под воздействием которого происходит увеличение п.
Количество ступеней пускового реостата и величины их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключения ступеней максимальные и минимальные значения 1а на всех ступенях получились одинаковыми. По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рис. 10-2 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рис. 10-2, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени пускового реостата. Поскольку их сопротивление по сравнению с RB = rB + Rp B мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рис. 10-2, б), которые поочередно шунтируются контактами Kl, К2, КЗ автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1—2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
В этом случае поток возбуждения исчезает не сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость п, согласно выражению (10-7), будет сильно увеличиваться («разнос» двигателя). ° результате ток якоря значительно возрастет и возникнет круговой
![]()
огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей.
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Параллельную обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток гв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения (см. § 10-4).
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается -от схемы пуска двигателя параллельного возбуждения (рис. 10-2), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
§ 10-3. Регулирование скорости вращения и устойчивость работы двигателя
Способы регулирования скорости вращения двигателей постоянного тока следуют из соотношений' (10-7) и (10-9). Возможны три способа регулирования скорости вращения.