

- •ОСНОВНЫЕ ПРИНЦИПЫ И ПОНЯТИЯ 3D МОДЕЛИРОВАНИЯ В T-FLEX CAD 3D
- •Введение в твердотельное моделирование
- •Что такое твёрдое тело?
- •Параметризация. Регенерация модели
- •Элементы и операции в 3D
- •Общая схема организации элемента 3D модели
- •3D элементы построения
- •Основные трёхмерные операции
- •Операции по вставке и копированию 3D элементов
- •Вспомогательные элементы и операции
- •2D проекции
- •Визуализация трёхмерных объектов
- •Анимация трёхмерной модели
- •Организация твердотельного моделирования в T-FLEX CAD 3D
- •Общие рекомендации перед созданием 3D модели
- •Методы создания трёхмерной модели
- •Как работать в системе T-FLEX CAD 3D
- •Получение справки
- •Создание нового документа. Использование шаблона-прототипа
- •Работа мышкой. Контекстное меню
- •Ввод команд (с клавиатуры, с помощью пиктограмм, из текстового меню)
- •Команды T-FLEX CAD 3D по группам
- •Выбор элементов. Настройка
- •Выбор элементов
- •Открытие новых окон
- •Манипулирование моделью в 3D окне
- •Окно «3D модель»
- •Окно «Диагностика»
- •Панели инструментов
- •Настройки
- •КРАТКИЙ ВВОДНЫЙ КУРС ПО СОЗДАНИЮ 3D МОДЕЛИ
- •Основной метод создания 3D модели
- •Создание вспомогательных элементов
- •Создание первой операции вращения
- •Создание отверстий
- •Создание сглаживания
- •Создание чертежа
- •Метод «От чертежа к 3D модели»
- •РАБОТА С ОКНОМ 3D ВИДА
- •Основные положения
- •Методы визуализации 3D сцены
- •3D сцена
- •Активная камера
- •Вращение 3D сцены
- •Автоматическое вращение 3D сцены
- •Центр вращения 3D сцены
- •Метод проецирования
- •Автомасштабирование
- •Плоскость обрезки
- •Параметры 3D вида
- •Вызов команд управления 3D видом с помощью мыши
- •ОБЩИЕ ПАРАМЕТРЫ 3D ЭЛЕМЕНТОВ
- •Общесистемные параметры
- •Закладка «Общие»
- •Закладка «Преобразование»
- •Использование создаваемого тела в булевой операции
- •СОЗДАНИЕ СБОРОЧНЫХ ТРЕХМЕРНЫХ МОДЕЛЕЙ
- •Проектирование сборочных чертежей "снизу - вверх"
- •Проектирование сборочных чертежей "сверху - вниз"
- •Создание спецификации
- •РАБОЧИЕ ПЛОСКОСТИ
- •Основные положения
- •Что такое рабочая плоскость?
- •Создание рабочих плоскостей
- •Создание стандартной рабочей плоскости
- •Построение стандартной рабочей плоскости в 2D окне
- •Построение стандартной рабочей плоскости в 3D окне
- •Построение рабочих плоскостей в 2D окне
- •Создание дополнительной рабочей плоскости
- •Создание рабочей плоскости на основе 2D проекции
- •Создание рабочей плоскости на основе локальной системы координат
- •Заключение
- •Создание рабочих плоскостей в 3D виде
- •Создание рабочей плоскости параллельно грани или другой рабочей плоскости
- •Создание рабочей плоскости, проходящей через узел или вершину
- •Создание рабочей плоскости, проходящей через ребро или ось поверхности вращения
- •Создание рабочей плоскости, перпендикулярной ребру или пути
- •Создание рабочей плоскости касательной к грани
- •Выбор начала координат рабочей плоскости
- •Создание копии рабочей плоскости
- •Создание рабочих плоскостей на основе плоских граней
- •Использование активной рабочей плоскости
- •Активизация рабочей плоскости
- •Управление активной рабочей плоскостью
- •Изменение размера рабочей плоскости, созданной в 3D окне
- •Параметры рабочих плоскостей
- •Закладка «Рабочая плоскость»
- •Закладка «Преобразование»
- •Редактирование рабочих плоскостей
- •РАБОЧИЕ ПОВЕРХНОСТИ
- •Основные положения
- •Создание рабочих поверхностей
- •Определяющие параметры цилиндрической, сферической и тороидальной систем координат
- •Задание начальной и конечной точек параметрической области
- •Выбор окружности, задающей фиксированный параметр системы координат
- •Выбор системы координат, относительно которой задается координатная поверхность
- •Задание визуальных границ параметрической области
- •Параметры рабочих поверхностей
- •Редактирование рабочих поверхностей
- •3D УЗЛЫ
- •Создание 3D узлов
- •Создание 3D узла на основе проекций (2D узлов)
- •Создание 3D узла как точки в абсолютных координатах
- •Создание 3D узла относительно другого 3D узла
- •Создание 3D узла относительно локальной системы координат
- •Дополнительные способы создания 3D узлов
- •Создание 3D узла на основе вершины
- •Создание 3D узла на основе эллиптического ребра
- •Создание 3D узла на основе сферической грани
- •Создание 3D узла на основе 3D пути
- •Создание 3D узла относительно другого по 3D пути
- •Создание 3D узла на основе 3D профиля
- •Создание 3D узла на основе ребра
- •Создание 3D узла по граням и смещениям
- •Создание 3D узла на основе грани и кривой
- •Создание 3D узла по наименьшему расстоянию между элементами
- •Создание 3D узла на грани
- •Параметры 3D узлов
- •Редактирование 3D узлов
- •3D ПРОФИЛИ
- •Основные положения
- •Создание 3D профилей
- •Создание 3D профиля на основе контура штриховки
- •Самопересекающиеся контуры
- •Создание 3D профиля на основе контура текста
- •Создание 3D профиля на основе трёхмерных объектов
- •Проецирование профиля на грань или тело
- •Копирование 3D профиля
- •Создание 3D профиля - эквидистанты
- •Наложение профиля на грань или тело
- •Создание профилей на активной рабочей плоскости
- •Параметры 3D профилей
- •Закладка «Преобразование»
- •Редактирование 3D профилей
- •ЛОКАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ
- •Основные положения
- •Создание локальных систем координат
- •Построение локальной системы координат на основе 3D узлов
- •Особенности построения локальной системы координат на основе 3D узлов
- •Построение локальной системы координат на основе плоской грани, точек и ребер
- •Задание начальной точки системы координат
- •Задание направления оси X
- •Доопределение расположения системы координат
- •Построение локальной системы координат на основе трех плоскостей
- •Доопределение расположения системы координат
- •Построение системы координат на основе плоской грани, дополнительной плоскости и точки
- •Доопределение расположения системы координат
- •Построение локальной системы координат на основе плоской грани, оси тора или цилиндра
- •Построение локальной системы координат на основе цилиндрической, конической или тороидальной грани
- •Доопределение расположения системы координат
- •Изменение положения системы координат
- •Изменение ориентации осей локальной системы координат
- •Параметры локальных систем координат
- •Закладка «Общие»
- •Закладка «Преобразование»
- •Закладка «Разборка»
- •Редактирование локальных систем координат
- •3D ПУТИ
- •Создание 3D путей
- •Создание 3D пути на основе контура штриховки
- •Создание 3D пути по 2D путям
- •Создание 3D пути по связанным рёбрам
- •Создание 3D пути (сплайна) по 3D узлам
- •Создание 3D пути по последовательности 3D путей
- •Создать 3D путь по двум проекциям
- •Создать 3D путь как проекцию 3D пути на грань или тело
- •Создание копии 3D пути
- •Создание эквидистанты к 3D пути
- •Создание 3D пути на основе сечения тела плоскостью
- •Создание 3D пути с параметрическим изменением 3D узла
- •Параметры 3D путей
- •Закладка «Преобразование»
- •Редактирование 3D путей
- •ПУТЬ ТРУБОПРОВОДА
- •Создание 3D пути для трубопровода
- •Плоскость черчения
- •Перемещение плоскости черчения
- •Параметры 3D путей
- •Закладка «Преобразование»
- •Закладка «Радиусы скругления»
- •Редактирование 3D пути трубопровода
- •СЕЧЕНИЕ
- •Создание сечения
- •Создание сечений на основе рабочей плоскости
- •Создание сечения на основе 2D проекции
- •Создание сечения по 3D виду
- •Применить/Отменить сечение
- •Параметры сечения
- •Редактирование сечения
- •2D ПРОЕКЦИИ
- •Основные положения
- •Создание 2D проекции
- •Построение стандартных видов
- •Создание дополнительного вида
- •Создание разреза или сечения
- •Создание местного разреза
- •Построение проекции на рабочей плоскости
- •Общий случай создания 2D проекции
- •Выбор элементов для проецирования
- •Создание разрыва на проекции
- •Особенности построения и дальнейшее использование 2D проекций
- •Параметры 2D проекции
- •Закладка «Общие»
- •Закладка «Вид»
- •Закладка «Линии»
- •Редактирование 2D проекции
- •ВЫТАЛКИВАНИЕ
- •Задание операции выталкивания
- •Задание операции выталкивания на основе 3D профиля
- •Задание операции выталкивания на основе грани
- •Задание операции выталкивания на основе штриховки
- •Создание выталкивания с использованием контура, созданного на активной рабочей плоскости
- •Задание ограничения выталкивания
- •Использование создаваемого тела в булевой операции
- •Параметры операции выталкивания
- •Закладка «Операция»
- •Редактирование операции выталкивания
- •ВРАЩЕНИЕ
- •Основные положения
- •Задание операции вращения
- •Задание операции вращения на основе 3D профиля
- •Особенности задания операции вращения
- •Задание операции вращения на основе грани
- •Задание операции вращения на основе штриховки
- •Создание вращения с использованием контура, созданного на активной рабочей плоскости
- •Параметры операции вращения
- •Закладка «Общие»
- •Закладка «Операция»
- •БУЛЕВА ОПЕРАЦИЯ
- •Задание булевой операции
- •Создание булевой операции на основе двух тел
- •Создание копий исходных операций
- •Создание булевой операции на основе нескольких тел
- •Создание булевой операции с использованием тонкостенных операций.
- •Создание булевой операции при помощи дерева 3D модели
- •Параметры булевой операции
- •Закладка «Общие»
- •Закладка «Операция»
- •Редактирование булевой операции
- •СГЛАЖИВАНИЕ
- •Задание операции сглаживания
- •Задание операции сглаживания
- •Предварительный просмотр
- •Особенности сглаживания рёбер
- •Параметры операции сглаживания
- •Закладка «Общие»
- •Закладка «Ребро»
- •Закладка «Обработка перекрытий»
- •Закладка «Список»
- •Закладка «Преобразование»
- •ЛОФТИНГ
- •Основные положения
- •Задание операции лофтинг
- •Задание операции лофтинг по 3D профилям
- •Установка соответствия между 3D профилями
- •Задание операции лофтинг по 3D профилям и 3D узлам
- •Задание операции лофтинг по 3D профилям и 3D пути
- •Задание граничных условий
- •Лофтинг с граничными условиями к плоскостям крайних профилей
- •Граничные условия по узлам
- •Использование создаваемого тела в булевой операции
- •Параметры операции лофтинг
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Сглаживание»
- •Закладка «Преобразование»
- •Редактирование операции лофтинг
- •ЛИНЕЙЧАТАЯ ОПЕРАЦИЯ
- •Задание линейчатой операции
- •Задание линейчатой операции между двумя 3D профилями
- •Выбор первого 3D профиля
- •Выбор второго 3D профиля
- •Установка соответствия между 3D профилями по 2D узлам
- •Задание линейчатой операции между 3D профилем и 3D узлом.
- •Использование создаваемого тела в булевой операции.
- •Параметры линейчатой операции
- •Закладка «Общие»
- •Закладка «Сглаживание»
- •Закладка «Преобразование»
- •Редактирование линейчатой операции
- •ТЕЛО ПО ТРАЕКТОРИИ
- •Задание операции тело по траектории
- •Задание операции тело по траектории
- •Задание операции тело по траектории с поворотом 3D профиля
- •Параметры операции тело по траектории
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Тело по траектории с параметрическим изменением профиля
- •Способ свободной ориентации копии
- •Пример 1
- •Пример 2
- •Способ ориентации копии по путям или поверхностям
- •Пример 3
- •Редактирование операции тело по траектории
- •ТРУБОПРОВОД
- •Задание операции трубопровод
- •Параметры операции трубопровод
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Редактирование операции трубопровод
- •3D ИЗОБРАЖЕНИЯ
- •Основные положения
- •Создание 3D изображений
- •Использование 3D изображений для создания планировок
- •Параметры 3D изображений
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Редактирование 3D изображений
- •ВНЕШНЯЯ МОДЕЛЬ
- •Вставка внешней модели
- •Выбрать внешнюю модель
- •Выбор целевой системы координат
- •Задание параметров
- •Подтверждение ввода внешней модели
- •Параметры внешней модели
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Редактирование внешней модели
- •3D КОПИИ
- •Основные положения
- •Создание копии
- •Выбор 3D операции
- •Выбор исходной системы координат
- •Выбор целевой системы координат
- •Выбор исходной и целевой систем координат с помощью 3D узлов и вершин
- •Задание параметров
- •Подтверждение создания копии
- •Параметры копии
- •Закладка «Общие»
- •Закладка «Опции»
- •Закладка «Преобразование»
- •Редактирование копии
- •МАССИВЫ
- •Задание 3D массива
- •Задание массива по направляющему вектору
- •Выбор 3D операции
- •Задание вектора направления
- •Задание параметров
- •Дополнительные возможности
- •Задание массива по точкам
- •Задание массива по пути
- •Задание параметрического массива
- •Редактирование массива
- •МАССИВЫ ВРАЩЕНИЯ
- •Основные положения
- •Задание массива вращения
- •Задание операции массив вращения
- •Выбор 3D операции
- •Задание оси вращения
- •Задание угла между копиями
- •Задание параметров
- •Подтверждение создания массива вращения
- •Параметры массива вращения
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Редактирование массива вращения
- •3D СИММЕТРИЯ
- •Создание симметричного тела
- •Выбор 3D операции
- •Выбор плоскости симметрии
- •Задание параметров
- •Подтверждение создания операции симметрия
- •Параметры симметрии
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Редактирование симметрии
- •ОТСЕЧЕНИЕ
- •Основные положения
- •Задание операции отсечения
- •Задание операции отсечения по сечению
- •Особенности использования некоторых секущих элементов
- •Отсечение тела гранью
- •Отсечение тела несколькими гранями
- •Операция рассечения
- •Параметры операции отсечения
- •Закладка «Общие»
- •Закладка «Преобразование»
- •Редактирование операции отсечения
- •РАЗДЕЛЕНИЕ
- •Создание разделения
- •Параметры разделения
- •Редактирование операции разделения
- •УКЛОН
- •Создание уклона
- •Задание направления отклонения граней
- •Выбор ''верхней'' грани для отклонения всех смежных граней
- •Задание отклоняемых граней
- •Дополнительные возможности
- •Параметры уклона
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Редактирование уклона
- •ОБОЛОЧКА
- •Основные положения
- •Создание оболочки
- •Выбор удаляемой грани или тела
- •Выбор граней, для которых толщина стенки задается отдельно
- •Параметры операции оболочка
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Редактирование операции оболочки
- •ПРУЖИНЫ
- •Задание операции пружина
- •Задание оси пружины
- •Выбор стартовой точки положения профиля пружины
- •Задание параметров операции пружина
- •Использование создаваемого тела в булевой операции
- •Параметры операции пружина
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Опции»
- •Закладка «Преобразование»
- •Редактирование операции пружина
- •СПИРАЛИ
- •Задание операции спираль
- •Задание оси спирали
- •Выбор профиля спирали
- •Задание ориентации 3D профиля в пространстве
- •Задание параметров спирали
- •Выбор стартовой точки положения профиля спирали
- •Использование создаваемого тела в булевой операции
- •Параметры операции спираль
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Опции»
- •Закладка «Преобразование»
- •Редактирование операции спираль
- •КАРКАСНАЯ ПОВЕРХНОСТЬ
- •Создание каркасной поверхности
- •Примеры применения каркасной поверхности
- •Редактирование каркасной поверхности
- •СШИВКА
- •Создание сшивки
- •Редактирование сшивки
- •3D ФРАГМЕНТЫ (СБОРОЧНЫЕ МОДЕЛИ)
- •Создание 3D фрагментов
- •Выбор 3D фрагмента
- •Задание значений внешних переменных
- •Выбор исходной системы координат
- •Установка исходной системы координат по умолчанию
- •Выбор целевой системы координат
- •Перемещение фрагмента.
- •Задание параметров
- •Подтверждение создания 3D фрагмента
- •Автоматическое создание булевой операции при вставке фрагмента
- •Фрагмент с переменным именем
- •Использование 3D фрагментов для создания планировок
- •Автоматическое создание 3D планировки
- •Создание 3D планировки на основе 2D фрагментов
- •Параметры 3D фрагментов
- •Закладка «Общие»
- •Закладка «Операция»
- •Закладка «Преобразование»
- •Редактирование 3D фрагментов
- •РАЗБОРКА
- •Выполнение команды
- •Особенности разборки 3D фрагментов
- •РЕДАКТИРОВАНИЕ 3D ЭЛЕМЕНТОВ
- •Редактирование 3D элементов построения
- •Редактирование 3D операций
- •ПЕРЕМЕЩЕНИЕ/ПОВОРОТ
- •Основные положения
- •Выполнение команды
- •Перемещение
- •Поворот
- •Параметры преобразования
- •МАТЕРИАЛЫ...
- •Основные положения
- •Создание и редактирование материалов
- •Нанесение материала на отдельную грань (грани)
- •Параметры операции нанесения материала на грань (грани)
- •Редактирование нанесенного на грань (грани) материала
- •ИСТОЧНИКИ СВЕТА
- •Основные положения
- •Создание источника света
- •Точечный источник света
- •Направленный источник света
- •Прожектор
- •Параметры источника света
- •Редактирование источника света
- •КАМЕРЫ
- •Основные положения
- •Создание камер
- •Задание камеры
- •Выбор камеры в качестве активной
- •Перемещение камеры
- •Параметры камеры
- •Закладка «Параметры»
- •Закладка «Преобразование»
- •Редактирование камеры
- •ФОТОРЕАЛИСТИЧНОЕ ИЗОБРАЖЕНИЕ
- •Основные положения
- •Создание фотореалистичного изображения
- •ИЗМЕРЕНИЯ И ХАРАКТЕРИСТИКИ
- •Основные положения
- •Проведение измерений
- •Измерение расстояния между двумя телами
- •Проверка двух тел на пересечение
- •Проверка всех тел на пересечение
- •Измерение элемента и отношений между элементами
- •Масс-инерционные характеристики
- •АНАЛИЗ КРИВИЗНЫ ПОВЕРХНОСТИ
- •Основные положения
- •Выполнение команды
- •Параметры отображения кривизны
Массивы
Шаг. Определяет шаг между копиями. Задается в том случае, если не установлен параметр
“Вычислять количество копий от длины вектора”, в противном случае рассчитывается автоматически.
Вычислять количество копий от длины вектора. Если данный параметр установлен, то количество копий определяется в зависимости от длины направляющего вектора и заданного шага.
Количество копий. Данный параметр задает количество копий исходного тела. Можно использовать переменную.
Включать исходную операцию. Если параметр установлен, то исходное тело включается в операцию массив. Параметры, установленные для массива (цвет, материал), распространяются и на него.
Копировать трёхмерную сетку исходной операции. Данный параметр позволяет не рассчитывать трёхмерную сетку для создаваемой копии, а использовать её с исходной операции. Это уменьшает затраты памяти и времени, но становится невозможным обращение к каким либо элементам полученного тела (узлам, ребрам, ЛСК и т.п.).
Операция является образцом при создании булевой операции. Установка данного параметра предполагает обязательное пересечение массива со вторым операндом булевой операции. Если данный параметр установлен, то в дальнейшем, при использовании массива в качестве операнда булевой операции, с установленным параметром "Использовать копирование операндов по образцу" (см. параметры булевой операции), для расчёта пересечения массива со вторым операндом, используется исходное тело массива, для остальных тел массива результат расчёта пересечений копируется. Это значительно ускоряет генерацию операции. Если пересечение не для всех тел массива одинаково, то данный параметр не работает. Если данный параметр не устанавливать, то расчёт пересечений массива со вторым операндом булевой операции будет производиться для всех тел массива.
Дополнительные возможности
Существуют и другие способы создания массива. Они становятся доступны при вызове опции:
|
<V> |
Дополнительные возможности. |
|
|
|
Можно выбрать один из следующих способов: |
||
|
|
|
|
<M> |
Задать массив по точкам. |
|
|
|
|
<T> |
Задать массив по пути. |
|
|
|
|
<О> |
Создать параметрический массив. |
|
|
|
Задание массива по точкам
Для создания 3D массива по точкам выбирается 3D узел, как базовая точка копируемого тела и любое количество 3D узлов, в которые будет скопировано данное тело.
Задание массива по пути
Для создания 3D массива по пути надо выбрать исходное тело  и 3D путь, вдоль которого будут помещены копии в соответствии с установленными параметрами.
и 3D путь, вдоль которого будут помещены копии в соответствии с установленными параметрами.
323
Трёхмерное моделирование
Исходная система координат помещается в начало 3D пути. Её оси ориентируются зависимости от геометрии 3D пути и от параметра, задающего тип позиционирования (см. ниже).
Для каждой следующей копии рассчитывается целевая система координат. Положение начала целевой системы координат рассчитывается на пути, в зависимости от параметров, определяющих шаг и количество копий (см. ниже). Направление осей целевой системы координат рассчитывается в зависимости от геометрии 3D пути и от параметра, задающего тип позиционирования (см. ниже).
Шаг массива и количество копий могут задаваться как в зависимости одного параметра от другого и от длины 3D пути, так и без зависимости – путём задания их значений. В первом случае копии равномерно распределяются по всей длине пути, либо с заданным шагом (в этом случае автоматически вычисляется количество копий), либо вычисляется шаг массива для распределения заданного количества копий. Шаг массива определяет расстояние вдоль пути между точками привязки копий, либо длину хорды пути (в случае позиционирования копий по хорде).
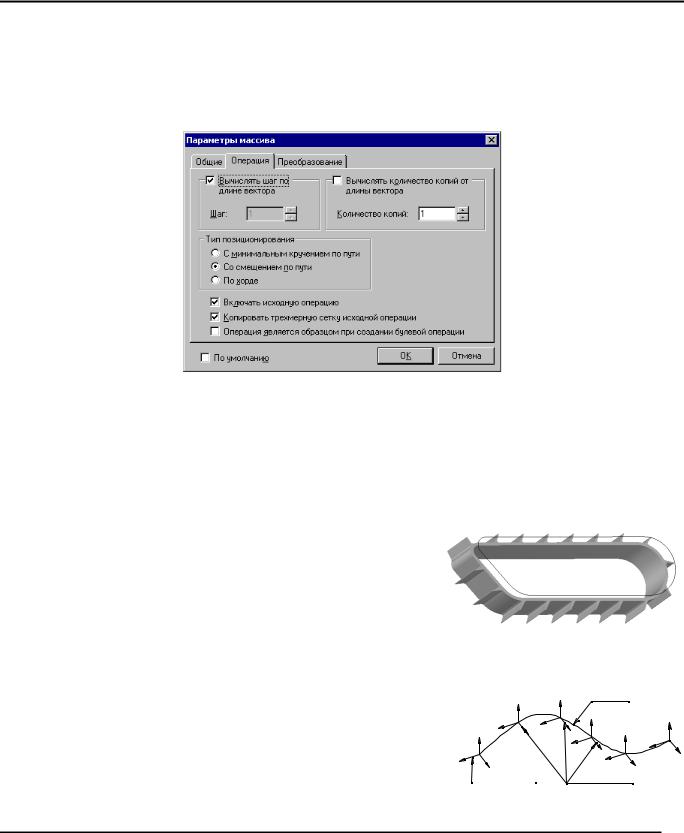
Тип позиционирования. Существует три алгоритма вычисления положения каждой копии в зависимости от геометрии 3D пути.
С минимальным кручением. Оси целевой системы координат каждой копии направляются таким образом, чтобы обеспечить плавное изменение ориентации копии в зависимости от изменения положения вектора кривизны пути. В качестве примера применения массива по пути с минимальным кручением можно привести модель конвейерной ленты.
Данный пример находится в папке Трёхмерное моделирование\Массивы\Конвейер.grb
Со смещением по пути. Целевые системы координат всех |
|
3D путь |
копий размещаются на пути в соответствии с |
|
|
установленными параметрами шага и количества копий. |
|
|
Направление осей этих систем координат постоянное и не |
|
|
зависит от геометрии 3D пути. |
|
|
Данный способ позиционирования можно применять, когда |
Исходная С.К. |
Целевые С.К. |
нужно расположить копии исходного тела вдоль траектории |
|
|
324
Массивы
3D пути с сохранением пространственной ориентации копии как у исходного тела.
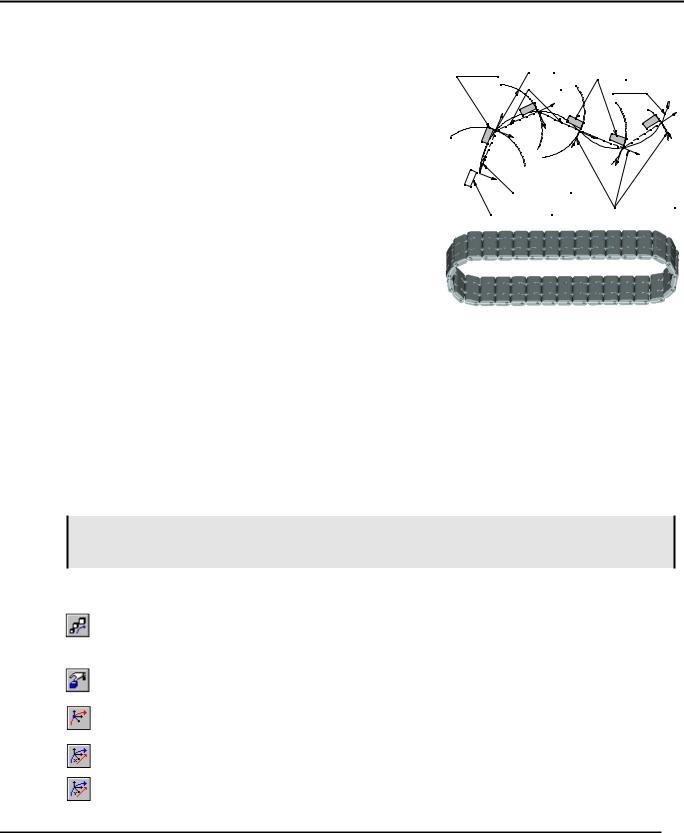
По хорде. Из начала пути, в котором располагается исходная система координат, строится сфера радиусом, равным заданному шагу массива. К точке пересечения сферы и 3D пути будет привязана вторая копия. Из полученной точки строится новая сфера и т.д. Таким образом определяются все точки привязки копий. В таких точках располагаются целевые системы координат копий. Ось Х целевой системы координат сориентирована по предыдущей хорде 3D пути. Хорда пути образуется двумя соседними точками привязки копий.
Исходная система координат расположена в начале пути. Её ось Х направлена на точку расположения первой копии.
Шагом массива при использовании данного типа позиционирования копий является длина хорды 3D пути.
Данный способ позиционирования может успешно применяться, например, при моделировании гусеничных лент или цепных передач.
1-я копия |
R=шаг |
Копии |
|
||
|
|
|
|
Хорды |
3D путь |
|
|
Исходная С.К.
Целевые С.К.
Исходное тело
Для демонстрации такого способа создания массива приведена модель гусеничной ленты. Данный пример находится в папке Трёхмерное моделирование\Массивы\Гусеница.grb
Задание параметрического массива
При построении такого массива используется универсальный механизм, позволяющий получать конечный результат на основе параметрического копирования исходного элемента. Этот же механизм используется в одном из режимов операции "Тело по траектории", в котором создаётся новое тело на основе "движения" (копирования) профиля; он же используется в одном из режимов создания 3D пути.
Наиболее полно работа этого алгоритма описана на примере операции "Тело по траектории". Поэтому в данном параграфе мы не будем ещё раз подробно описывать работу данного механизма. Приведём лишь краткое описание алгоритма и характерные примеры.
Пиктограмма для вызова данного режима находится в автоменю и доступна из числа дополнительных опций команды создания массива.
|
<О> |
Создать параметрический массив. |
|
|
|
|
|
После включения режима становятся доступными следующие действия: |
|||
|
|
|
|
|
<B> |
Выбрать 3D |
операцию. |
|
|
|
|
|
<1> |
Выбрать 3D путь, задающий положение начала |
|
|
координат |
|
|
|
|
|
|
|
<2> |
Выбрать 3D |
путь, задающий направление оси X |
|
|
|
|
|
<3> |
Выбрать 3D |
путь, задающий направление оси Y |
|
|
|
|
325
Трёхмерное моделирование
|
<4> |
Выбрать грань, задающую ориентацию оси X |
|
|
|
|
<5> |
Выбрать грань, задающую ориентацию оси Y |
|
|
|
|
<6> |
Выбрать исходную систему координат |
|
|
|
|
<7> |
Отменить выбор элементов, задающих систему |
|
координат |
|
|
|
|
|
|
|
Итак, в результате мы должны определить закон, по которому будут строиться копии исходного тела.
Для каждой копии рассчитывается так называемая система координат текущей копии. Копирование исходного тела происходит в направлении от исходной системы координат к рассчитанной системе координат текущей копии. В качестве исходной системы координат пользователь может выбрать одну из локальных систем координат модели. Если локальная система координат не выбрана, то в качестве исходной системы координат используется глобальная система координат.
Определение положения начала и ориентация осей системы координат текущей копии производится двумя способами:
•Можно задавать законы изменения параметров системы координат, описывая их выражениями.
•Другой способ позволяет использовать существующие 3D пути или поверхности других тел для определения в пространстве системы координат текущей копии. Управляя системой координат копии, пользователь управляет положением каждой копии.
Ведущим параметром является номер копии. Номер копии автоматически изменяется в процессе расчёта массива от 1 до указанного количества с шагом 1.
Управление системой координат копии осуществляется через диалог параметров (закладка «Параметры»). Можно выделить два основных типа параметров - управляемые параметры и управляющие параметры.
Управляемые параметры – параметры, значения которых рассчитываются автоматически в процессе создания элемента. Для считывания значений таких параметров можно назначить независимые переменные.
Параметр «номер копии» всегда является управляемым. Для него обязательно нужно выбрать независимую переменную, которой будет присваиваться текущее значение номера копии при расчёте операции.
Управляющие параметры – поля, зависимости в которых задаются пользователем. В поле управляющих переменных может быть вписано произвольное выражение. В данное выражение можно включить любую переменную системы. Например, включите в него переменную, отвечающую за номер копии. При этом получится определённая выражением зависимость данного параметра от номера копии.
В зависимости от способа определения параметров системы координат текущей копии, некоторые параметры могут являться как управляющими, так и управляемыми.
Расчёт выполняется в следующем порядке: присваивается следующее значение номеру копии, рассчитываются управляющие параметры, вычисляются остальные управляемые параметры (если они есть), выполняется копирование.
326
Массивы
Как уже отмечалось выше, можно выделить два способа создания параметрического массива. Рассмотрим на примерах каждый из них.
Способ свободной ориентации копии
При создании массива таким способом достаточно выбрать тело, задать количество копий и назначить независимую переменную на параметр «номер копии». Используя переменную, принимающую значения номеров копий, можно создать определённые зависимости в полях управляющих параметров, а также в 2D или 3D построениях, от которых, в свою очередь, будет зависеть положение и геометрия исходного тела.
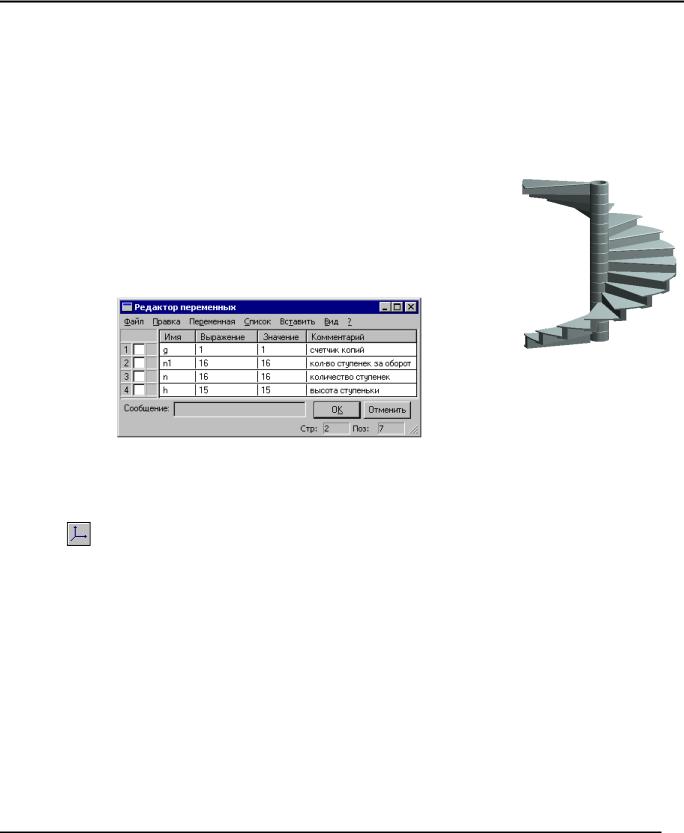
Рассмотрим создание параметрического массива данным способом на примере модели винтовой лестницы. Файлы примеров находятся в директории Трёхмерное моделирование\Массивы\Винтовая
лестница.grb.
Здесь копируется секция лестницы с изменением положения по высоте и угла поворота относительно оси лестницы. Для удобства работы с моделью в редакторе переменных созданы следующие переменные:
Секция винтовой лестницы вставлена в документ в качестве 3D фрагмента. Данный фрагмент вставлен таким образом, что ось лестницы совпадает с глобальной осью Z. Если бы фрагмент располагался произвольно, то потребовалось бы дополнительно выбрать локальную систему координат с помощью опции
|
<6> |
Выбрать исходную систему координат |
|
|
|
Её ось Z должна быть направлена по оси лестницы.
В данном примере закон, по которому будет определяться положение каждой копии в зависимости от значения счётчика копий, можно описать в полях управляющих параметров. Задайте параметры операции "Параметрический массив", как показано на следующих рисунках.
327