

Математические способы уменьшения погрешностей
формула скользящего среднего

экспоненциальное сглаживание
![]()
сглаживание по каждому вектору

В тех случаях, когда управление осуществляется редко, т.е. частота управления небольшая и промежуток времени – сутки, можно вычислять более сложные показатели, чем обычные ТЭП.
Система динамической стабилизации
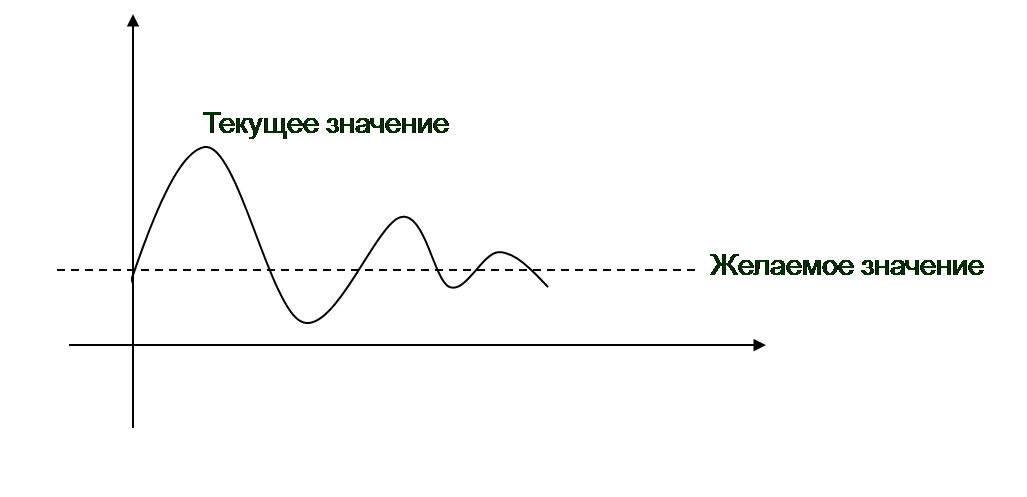
В системах динамической стабилизации цель управления заключается в том, чтобы управляемые параметры отклонялись как можно меньше от желаемого результата. Система динамической стабилизации – это небольшая часть объекта, где имеется вектора входов и выходов и необходимо эффективное управление.YitЖелаемое значениеТекущее значение
Графически это можно изобразить следующим образом:
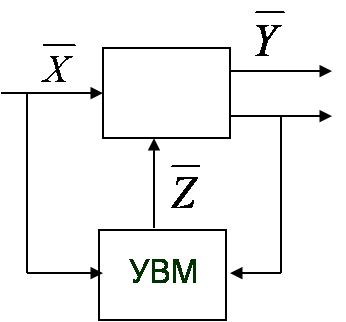
Структурная схема системы динамической стабилизации
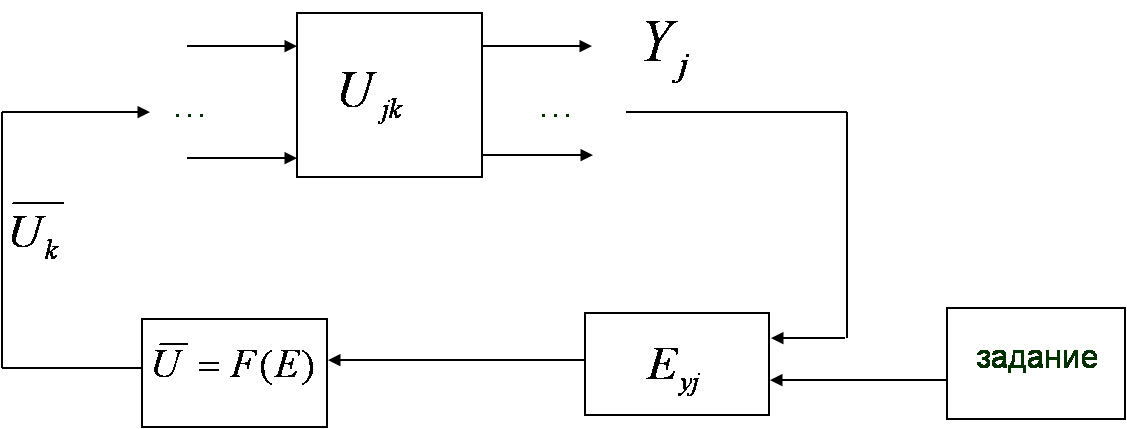
Принципы построения систем динамической стабилизации
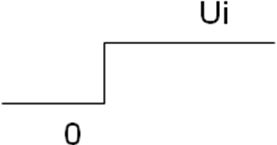
Принцип обратной связи.
![]()
Если разность ∆U(t) положительна, то управление отрицательно
Если разность ∆U(t) отрицательна, то управление положительно
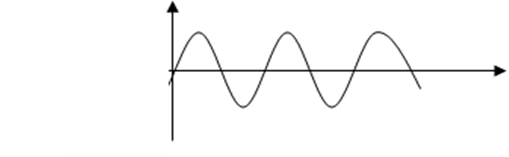
Устойчивость системы, т.е. система должна быть устойчивой, то есть при
 колебания затухают.
колебания затухают.Минимизация некоторого критерия
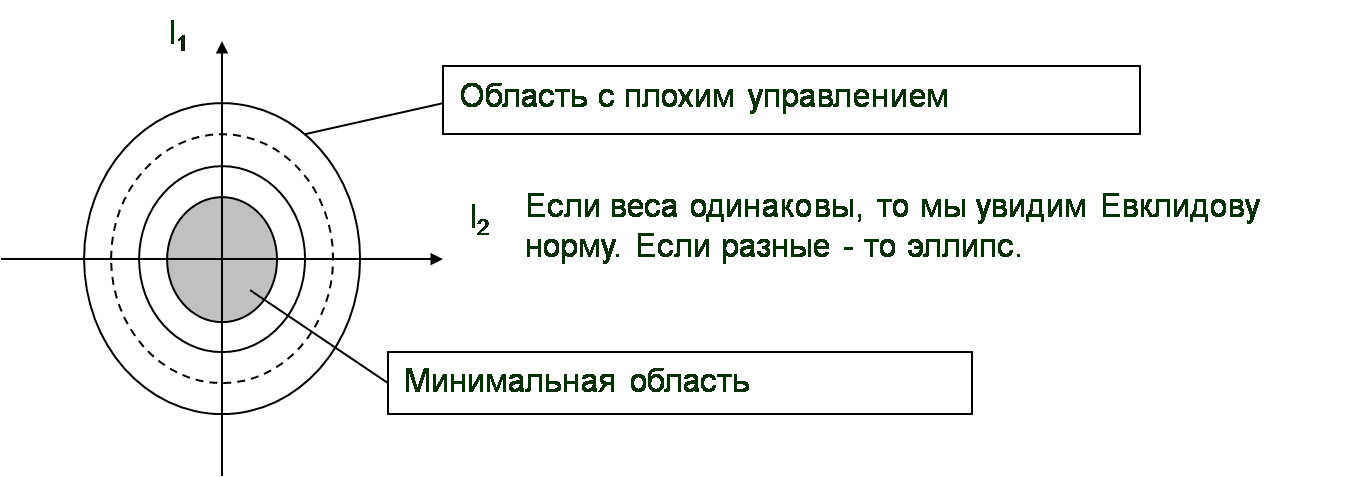
Виды минимизируемых критериев
 с ограничением отражает динамические
свойства (например, синусоиды разных
амплитуд) замкнутого контура управления.
с ограничением отражает динамические
свойства (например, синусоиды разных
амплитуд) замкнутого контура управления.



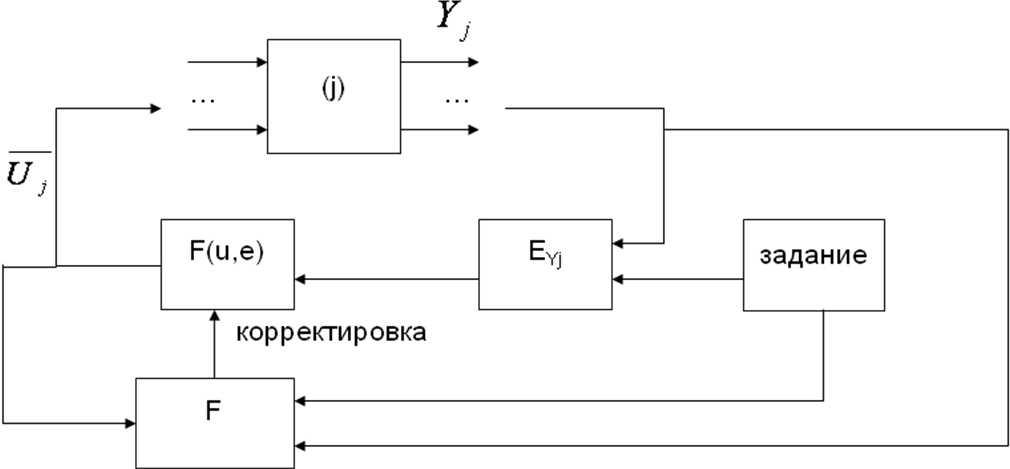
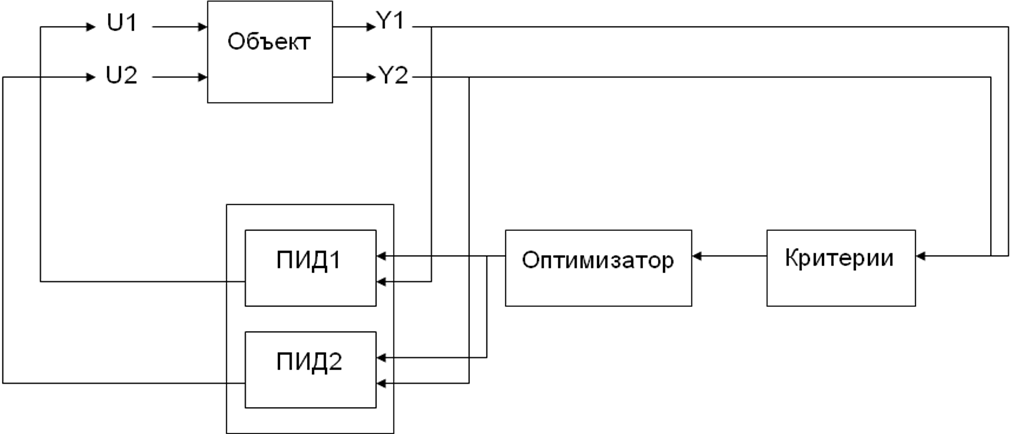
Структурная схема двухконтурной системы управления
Цифровая реализация ПИД законов регулирования
Ошибка

![]()
ПИД закон регулирования
![]()
Центральный регулятор
Структурная схема
Тестовые воздействия по управлению
импульсное воздействие

скачкообразное
частотное
произвольное воздействие

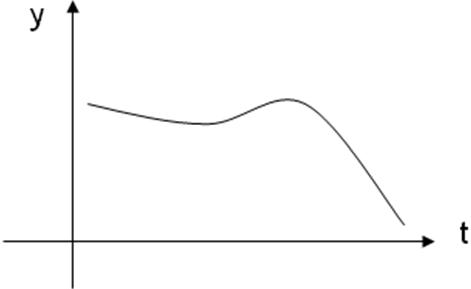
Типовые реакции на входные воздействия
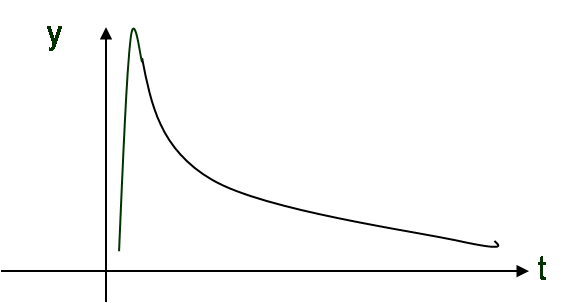
Реакция на импульсное воздействие
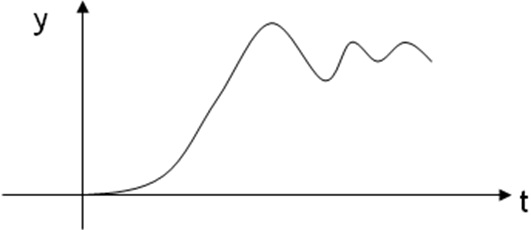
Реакция на ступенчатое воздействие
Реакция на частотное воздействие
Передаточная функция ПИД- регулятора
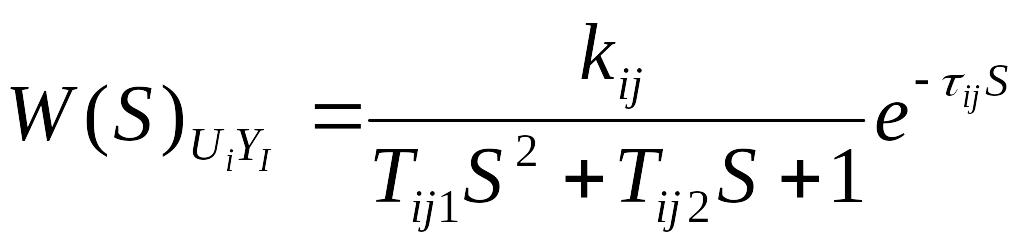
![]() - коэффициент усиления
- коэффициент усиления
![]() - постоянная времени 1 и 2го порядка
- постоянная времени 1 и 2го порядка
 -
коэффициент усиления
-
коэффициент усиления
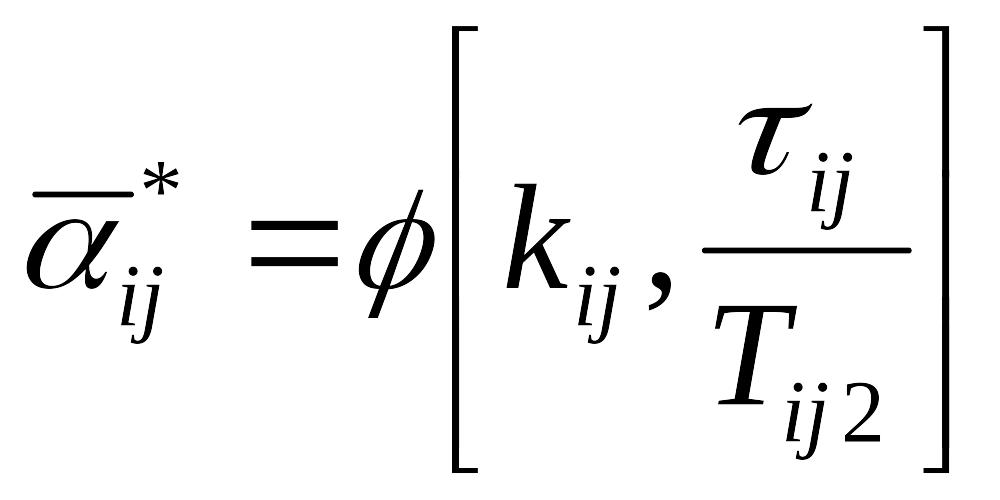
Виды обобщенных критериев

![]()
В ряде случаев удобно оперировать не самими квадратами ошибок а их квадратами
![]()
![]()
![]()
Особенности цифровой реализации ПИД закона регулирования

где
![]() ,
,
![]() - шаг
- шаг
В цифровой форме:
![]()
![]() -
обобщенный коэффициент передачи
центрального регулятора;
-
обобщенный коэффициент передачи
центрального регулятора;
![]() -
такт квантования;
-
такт квантования;
![]() -
время интегрирования;
-
время интегрирования;
![]() - время дифференцирования (постоянная
времени дифференцирования).
- время дифференцирования (постоянная
времени дифференцирования).
Форсированное управление
Для момента времени U[к-1] (3)
![]()
Если записать управление для промежутка
![]() ,
то получим Формулу форсированного
управления
,
то получим Формулу форсированного
управления
![]()
По методу прямоугольников
![]()
![]()
![]()
По методу трапеций
![]()
![]()
Системы модального управления
В системах модального управления вместо интегральных критериев и сверток применяют такое понятие как мода (образец).
Еще одной особенностью является то, что заказчик сам рисует кривую переходного процесса, а также он может задавать периодичность, колебательность и т. д.
Управление по показателям качества
Схема управления по показателям качества:
![]() - пространство измерений;
- пространство измерений;
![]() - пространство состояний;
- пространство состояний;
![]()
Задача косвенного контроля: по измеренному пространству состояний необходимо предсказать, каким будет показатель качества.
На выходе объекта есть вычисляемыйпоказатель
качества
![]()
![]() - суммарная погрешность обусловлена
погрешностью измерений и погрешностью,
связанной с динамическими свойствами
объекта.
- суммарная погрешность обусловлена
погрешностью измерений и погрешностью,
связанной с динамическими свойствами
объекта.