

13.Метод динамического программирования в непрерывной форме.
Рассмотрим непрерывный процесс, описанный системой дифференциальных уравнений
![]()
![]()
![]()
![]() -
вектор управления
-
вектор управления
![]()
Требуется найти такое управление , которое обеспечивает минимум функционалу
![]() (2)
(2)
Рисунок
![]() -
2 стадии непрерывного процесса
-
2 стадии непрерывного процесса
Обозначим минимум значения функционала на 2 последнем отрезке
![]()
x- состояния входа, t – время.
Разобьем этот интервал на 2 интервала
Рис
Где
![]() -
бесконечно малая величена
-
бесконечно малая величена
Запишем уравнение (3) на этих 2-х отрезках
![]()
Используя принцип оптимальности:
![]() (4)
(4)
Обозначим через
![]()
Подставив в (4)
![]()
Поскольку значение
![]() от выбора управления не зависит, то ее
можем внести под знак минимума и тогда
выражение (5)
от выбора управления не зависит, то ее
можем внести под знак минимума и тогда
выражение (5)
![]()
Разделим каждое слагаемое этого уровня
на
![]()
![]()
Перейдем к приделу при
![]()
На основании теоремы о среднем значении
интеграла на бесконечно малом отрезке
времени![]()
Пояснение
Рисунок
Тогда
![]() (5а)
(5а)
![]() (6)
(6)
![]()
![]() -
полная производная этой функции.
-
полная производная этой функции.
![]()
![]()
Вместо
![]()
![]()
![]()
Полученное выражение полной производной составляет в силу уравнения движения (1)
Подставив в уравнение (5а) значение полной производной
![]() -
частная производная независим от
управления
,
поэтому ее можно вынести за знак минимума.
-
частная производная независим от
управления
,
поэтому ее можно вынести за знак минимума.
 (7)
(7)
Это уравнение должно для непрерывных процессов.
Из этого уравнения находятся оптимальное уравнение и Функционала при этом для определения оптимизации управления использует необходимое условие экстремума функции.
![]()
![]()
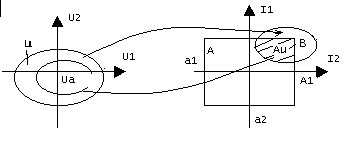
14. Геометрическая интерпретация озу.
Пусть вектор управления U и вектор функционала J имеет по две компоненты:
U=(U1, U2);
J=(J1, J2)
У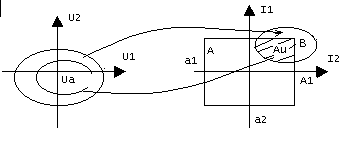 правление
правление
 принимает
свои значения из области U,
а функционалы J из
прямоугольника
принимает
свои значения из области U,
а функционалы J из
прямоугольника
a1≤J1≤A2; a2≤J2≤A1
Задавая различные управления U1,U2 из области U и используя уравнение процесса, получим на плоскости функционалов некоторую область В. Т.е. область U отображается в область В. Пересечение областей А и В - это есть область выполнения ограничений при допустимых управлениях U. При заданной области допустимых управлений U реализуется область Au= А∩В является пересечением областей А и В. Отображая Au на область допустимых управлений получим область возможных решений ОЗУ Ua.
Геометрическая интерпретация построения решения ОЗУ.(совместно с эквивалентными преобразованиями)
Для иллюстрации идеи метода решения
ОЗУ рассмотрим частный случай, когда
система характерезуется только двумя
односторонними неравенствами.
![]() или
одним двухсторонним
или
одним двухсторонним
![]() и имеет один скалярный управляющий
параметр
и имеет один скалярный управляющий
параметр
![]()
![]()
![]() допустимая
область изменения управляющих параметров.
Показатели
допустимая
область изменения управляющих параметров.
Показатели
![]() не
должны превосходить единицу, управления
u, удовлетворяющее условию
не
должны превосходить единицу, управления
u, удовлетворяющее условию
![]() Находиться в области
Находиться в области
![]() Характерным здесь является решение
Характерным здесь является решение
![]() ,
при котором
равны
между собою
,
при котором
равны
между собою
![]() ,
с другой стороны используя неравенство
(1),(3) получим что если
,
с другой стороны используя неравенство
(1),(3) получим что если
![]() (5),
то
(5),
то
![]() (6)
и наоборот из неравенства (6) следует
неравенство (5) и(1) таким образом
неравенства (1), (5),(6) эквивалентны друг
другу и могут заменять друг друга. В
дальнейшем будем пользоваться вместо
неравенства (1) неравенством (6).
Предварительно введем обозначение
(6)
и наоборот из неравенства (6) следует
неравенство (5) и(1) таким образом
неравенства (1), (5),(6) эквивалентны друг
другу и могут заменять друг друга. В
дальнейшем будем пользоваться вместо
неравенства (1) неравенством (6).
Предварительно введем обозначение![]() тогда неравенство (6) будет иметь вид
тогда неравенство (6) будет иметь вид
![]() Таким
образом суть этих преобразований в том,
что двухстороннее неравенство(1) привели
к односторонним неравенствам (7),
показатели процесса сделали безразмерными
и пределы изменения функционала сделали
одинаковыми от 0 до 1, и эквивалентная
формулеровка задач ОЗУ для процесса
описываемого системой уравнений
Таким
образом суть этих преобразований в том,
что двухстороннее неравенство(1) привели
к односторонним неравенствам (7),
показатели процесса сделали безразмерными
и пределы изменения функционала сделали
одинаковыми от 0 до 1, и эквивалентная
формулеровка задач ОЗУ для процесса
описываемого системой уравнений
![]() Требуется
найти такое управление
,
которое обеспечит выполнение неравенства
Требуется
найти такое управление
,
которое обеспечит выполнение неравенства
![]() при
выполняется
условие
при
выполняется
условие
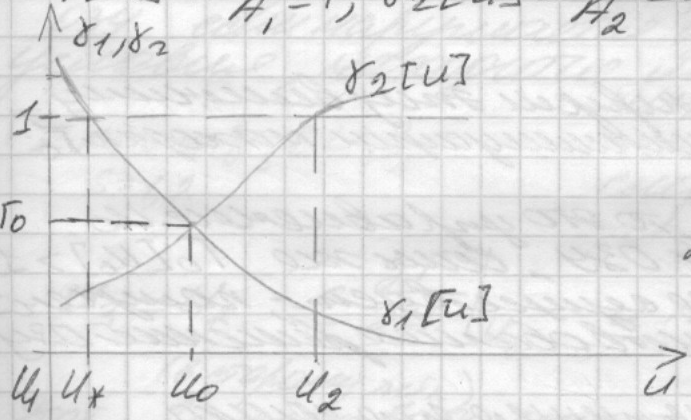
![]() Есть точка минимакса критериев
Есть точка минимакса критериев
![]() ,
т.е наибольшее имеет минимум. Для
вычисления
,
т.е наибольшее имеет минимум. Для
вычисления![]() сначала
фиксируем управление
и
находим наибольшее из двух величин
.
Оно равно
сначала
фиксируем управление
и
находим наибольшее из двух величин
.
Оно равно
![]() если
u лежит в интервале
если
u лежит в интервале
![]()
![]() и
равно
и
равно
![]() если
u лежит в интервале
если
u лежит в интервале![]() Далее минимизируем эту величину т.о. в
результате минимизации находим
Далее минимизируем эту величину т.о. в
результате минимизации находим
![]() Если
Если
![]() ,то
это управление
,то
это управление
будет решением ОЗУ.Если же
![]() то решение ОЗУ не существует ,полученное
условие существование решение ОЗУ.
используется для поиска решения одним
из методов программирования . Например
метод градиентного спуска. Например
зададим какое-то значение управления
то решение ОЗУ не существует ,полученное
условие существование решение ОЗУ.
используется для поиска решения одним
из методов программирования . Например
метод градиентного спуска. Например
зададим какое-то значение управления
![]() .При
этом управление вычислим критерии
.При
этом управление вычислим критерии
![]() Если
Если
![]() то [
]
то [
]
-решение ОЗУ.Если же при этом управление какой-нибудь из этих критериев >1.то
не яв-ся решением ОЗУ.Пусть![]() ,тогда
построим следующее приближение управления
,тогда
построим следующее приближение управления
![]() ,где
,где
![]()
![]() -величина
шага спуска .При новом управление
-величина
шага спуска .При новом управление
![]() выполняется критерий
выполняется критерий
![]() и проверяется условие
и проверяется условие
![]() Если условие верно то
-решение
ОЗУ. Если нарушается одно или оба условия
находиться
Если условие верно то
-решение
ОЗУ. Если нарушается одно или оба условия
находиться
![]() из
них при этом управление
и строится следующее приближение
из
них при этом управление
и строится следующее приближение
![]() и
т.д этот процесс продолжается до тех
пор пока не получим управление при
котором
и
т.д этот процесс продолжается до тех
пор пока не получим управление при
котором
![]() S=1,2m
или не найдем минимаксное значение
критерия
S=1,2m
или не найдем минимаксное значение
критерия
![]() Если
Если
![]() то
полученое управление является решением
минимаксной задачи и одним из решения
ОЗУ.
то
полученое управление является решением
минимаксной задачи и одним из решения
ОЗУ.