11.Принцип оптимальности Беллмана. Применение принципа при построении оптимальной стратегии управления.
Этот принцип сост-ет основу динамического программирования и формулир-ся след обр.
«Оптимальная стратегия обладает тем свойством, что каково бы не было состояние входа первой стадии х(0) и управления на ней u(1), последующее управление u(2), u(3)… u(n) составляют оптимальную стратегию отн-но выхода первой стадии x(1), Связанной уравнением состояния с величиной входа x(0) и управлением u(1)».
![]()
![]()
При применении принципа оптимальности критерий эффективности зависит от х(0):
( 1)
1)
(2)
(3)
Обозначим через
![]() (4).
(4).
Перепишем (4) учитывая (2):
![]() (5)
(5)
Обозначим максимальное значение:
![]() (6)
(6)
Тогда (5) с учетом (6):
![]()
Учитывая
![]() :
:
![]() - это реккурентное соотношение является
матем. формулировкой принципа оптимальности
для дискретных процессов.
- это реккурентное соотношение является
матем. формулировкой принципа оптимальности
для дискретных процессов.
12. Синтез оптимального регулятора. Решение задачи принципа максимума.
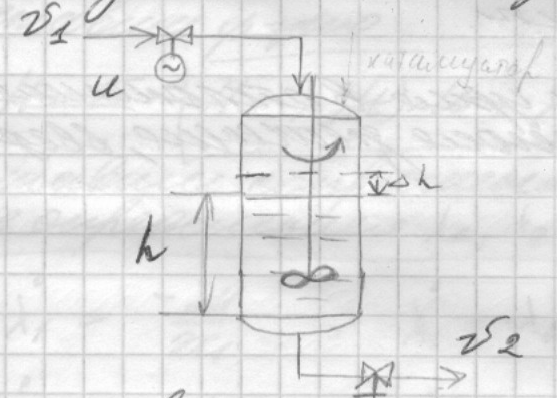
В аппарате необходимо поддерживать на заданном значении уровень жидкости h. Возмущения поступает по линии истока в результате изменения расхода υ2. В результате изменения расхода υ2 (например при увеличении) уровень жидкости изменяется (уменьшается). Для поддержания его на заданном значении необходимо увеличить приток жидкости υ1. Изменение притока жидкости осуществляется с помощью регулирующего органа, привод которого связан с электродвигателем. Расход жидкости υ1 пропорционален напряжению и знаку приложенного к электродвигателю U. Скорость изменения расхода лин-на зависит от
U:
![]() (1)
k – коэф. передачи.
(1)
k – коэф. передачи.
Уравнение материального баланса:
![]() ,
S – сечение. x1=Δυ1,
x2=SΔh,
ξ=Δυ2,
u=kU, x1,
x2, ξ
– отклонение параметров от стационарного
состояния. Исходные уравнения:
,
S – сечение. x1=Δυ1,
x2=SΔh,
ξ=Δυ2,
u=kU, x1,
x2, ξ
– отклонение параметров от стационарного
состояния. Исходные уравнения:
![]()
![]()
![]()
(4) -u0≤u≤u0
Задача: требуется найти такой значение управления u (t`), удовлетворяющей (4) при котором возможно перевести систему (1) из начального состояния (2) в конечное (3) за минимальное время Т. Управление u(t), напряжение электродвигателя может принимать “+”-ое и “-“-oе значение.
H=λ1(u)+
λ2(x1-ξ),
![]() ,
λ1(t)=
- x2t+C1,
λ2 (t)=C2,
λ1(t)=C1+C2t,
,
λ1(t)=
- x2t+C1,
λ2 (t)=C2,
λ1(t)=C1+C2t,
функция λ1(T)
линейная функция и при изменение времени
t, только один раз меняет
свой знак
![]() .
max H достигается
при
.
max H достигается
при
![]() или Uопт=U0*sign
λ1 (5)
или Uопт=U0*sign
λ1 (5)
![]()
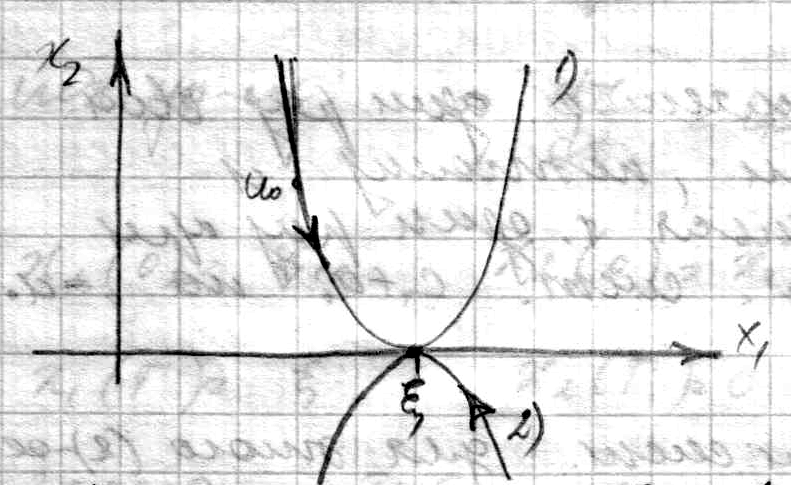
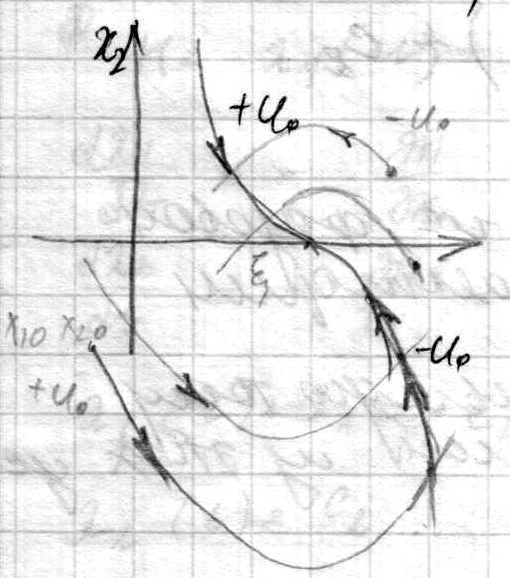
Т.к. функция λ1(t) меняет свой знак один раз при изменении времени, то управление будет меняться только один раз при переходе из начального состояния системы в конечное или наоборот. Построим фазовый портрет системы, для этого (2)-ое уравнение системы (1) разделим на 1-ое.
![]()
![]()
![]()
![]()
уравнение фазовой траектории, где С2=const интегрирования. Если она проходит ч/з начальную точку заданную (2), то С2 – определим из этих условий.
(6) уравнение фазовой траектории ч/з нач. точку. Уравнение фазовой траектории ч/з конечную точку.
![]()
![]() ,
где С2-определяется из конечных
условий (2)
,
где С2-определяется из конечных
условий (2)
![]()
![]() (7) уравнение фазовой траектории ч/з
конечную точку.
(7) уравнение фазовой траектории ч/з
конечную точку.
Изобразим уравнение фазовой траектории
ч/з конечную точку: u=+u0,
x2=![]()
![]() .
При возрастании Т из 1-го уравнения (1)
при управлении +u0 в
конечную точку ξ можно
попасть проходя по левой ветви параболы.
.
При возрастании Т из 1-го уравнения (1)
при управлении +u0 в
конечную точку ξ можно
попасть проходя по левой ветви параболы.
если u=-u0,
x2![]() по правой ветви линии переключения
параболы
по правой ветви линии переключения
параболы
![]() только
по этой линии можно попасть в конечную
точку.
только
по этой линии можно попасть в конечную
точку.
Если начальная точка задана правее
линии переключения, то
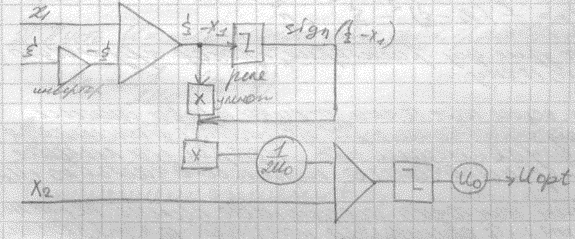
![]() оптимальный закон управления. Чтобы
получить uопт нужно
измерить x1,x2,ξ,
υ1, υ2
и уровень h. Для технической
реализации можно собрать схему из
аналоговых элементов и двух линейных
реле реализующих функцию знака
оптимальный закон управления. Чтобы
получить uопт нужно
измерить x1,x2,ξ,
υ1, υ2
и уровень h. Для технической
реализации можно собрать схему из
аналоговых элементов и двух линейных
реле реализующих функцию знака