

2. Электрические исполнительные механизмы
2.1 Общие сведения
Электрическими исполнительными (управляемыми) двигателями автоматических систем называют двигатели, предназначенные для преобразования электрического сигнала в угол поворота или частоту вращения (или перемещения) вала. Такие механизмы, преобразуют энергию электрического тока в механическую энергию с целью воздействия на объект управления или его органы.
Исполнительные механизмы представляют собой электроприводы, предназначенные для перемещения регулирующих органов в системах дистанционного и автоматического управления. В настоящее время наибольшее распространение получили асинхронные двухфазные исполнительные двигатели, исполнительные двигатели постоянного тока с независимым возбуждением или с возбуждением от постоянных магнитов, шаговые двигатели.
Эти двигатели предназначены для различных функциональных преобразований. В зависимости от устройства они могут работать либо в режиме непрерывного вращения (перемещения), либо в шаговом режиме.
Электрические микродвигатели постоянного и переменного тока, применяемые в системах автоматики, вычислительной техники и др., имеют номинальную механическую мощность от сотых долей ватта примерно до 750 Вт.
Требования, предъявляемые к исполнительным двигателя, вытекают из специфических условий работы исполнительных двигателей в устройствах автоматики. Основные из них:
высокое быстродействие (малая инерционность);
возможность регулирования частоты вращения исполнительного двигателя в широком диапазоне;
отсутствие самохода (явление самохода состоит в том, что двигатель продолжает развивать вращающий момент и его ротор продолжает вращаться при сигнале управления);
высокая линейность регулировочных и механических характеристик и обеспечение устойчивости работы во всем рабочем диапазоне угловых скоростей;
малый момент трения (малое напряжение трогания).
малая мощность управления при значительной механической мощности на валу (требование вызвано ограниченной мощностью источников сигнала управления, в основном электронных).
Немаловажным для исполнительных двигателей являются и такие параметры, как пусковой момент, габариты, масса; КПД и cosφ имеют второстепенное значение. Когда требуется строго постоянная частота вращения, используются синхронные двигатели.
К основным элементам электрических исполнительных механизмов относятся:
электродвигатель;
редуктор, понижающий число оборотов;
выходное устройство для механического сочленения с регулирующим органом;
дополнительные устройства, обеспечивающие остановку механизма в крайних положениях.
Выходные устройства электрических исполнительных механизмов выполняются так, чтобы осуществить вращательное или прямолинейное движение.
Исполнительные механизмы рассчитаны для работы при температуре окружающей среды от - 30 до +60°С и относительной влажности 30 - 80% (по договоренности с заводом возможно исполнение на диапазон (-50) - (+50) °С). Механизмы имеют пылебрызгозащитное исполнение.
2.2 Классификация
Электрические исполнительные механизмы делятся на электромагнитные и электродвигательные. К электромагнитным исполнительным относятся реле, контакторы, электромагниты, электромагнитные вентили и клапаны, электромагнитные муфты.
Основными видами электрических двигателей, изготавливаемых промышленностью являются: синхронные, асинхронные с короткозамкнутым или фазным ротором и электродвигатели постоянного тока с независимым, сериесным или смешанным возбуждением, а также некоторые виды специальных электродвигателей: коллекторные электродвигатели переменного тока, электродвигатели с постоянными магнитами и др. (рисунок 2.1).
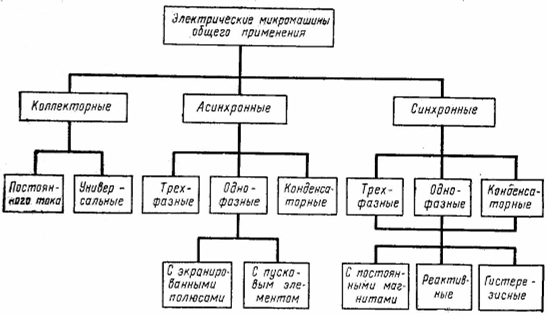
Рисунок 2.1 - Классификация микромашин общего применения
В зависимости от режима и условий работы изготовляются электродвигатели: для длительного и повторно-кратковременного режимов работы; для эксплуатации в нормальной и взрывоопасной среде; открытого, защищенного или закрытого исполнения; для работы в условиях тропического климата и в условиях крайнего севера; горизонтальные, вертикальные, встроенные и др.
Механизмы с вращающимися выходными устройствами подразделяются на однооборотные, у которых угол поворота выходного вала менее или равен 360°, и многооборотные, у которых выходной вал совершает более одного оборота.
Технические характеристики однооборотных исполнительных механизмов приведены в таблице 1и 2.
Электромагнитные исполнительные механизмы, основным элементом которых является электромагнитный привод, как правило, используются для поступательного перемещения органов управления, а электрические двигатели - для поворотного.
Электрические микродвигатели постоянного тока по конструкции и принципу действия подразделяют на коллекторные и бесконтактные, не имеющие скользящего контакта коллектор - щетки.
Коллекторные микродвигатели по конструкции якоря подразделяют на три типа: с барабанным якорем, с полым немагнитным якорем и с дисковым якорем.
Коллекторные микродвигатели с барабанным якорем бывают как постоянного тока, так и универсальные, т.е. способные работать от сети как постоянного, так и переменного тока. Последние используются только в качестве вспомогательных микродвигателей.