

Санкт-Петербургский государственный технологический институт
(Технический университет)
Кафедра САПРиУ
Курс 3
Группа 4893
Отчёт по лабораторной работе №4
«Изучение прямых и косвенных оценок качества регулирования»
Исполнители:
Ясевич Т.
Волкова Е.
Лозовенков В.
Руководители:
Гольцева Л..В.
Макарова Л.Ф.
Санкт-Петербург, 2011
Цель работы: определение и анализ частотных оценок качества регулирования; установление связи между косвенными и прямыми оценками качества; сравнение прямых оценок качества, рассчитанных по формулам и полученных непосредственно по графикам переходных процессов.
Задание:
Исследовать качество регулирования одноконтурной АСР с помощью прямых и косвенных оценок качества, используя программную систему OCENKA.

Рисунок 1 Структурная схема АСР
kоб = 1, T1 = 10, T2 =20, T3 =20
kрег(Tизp+1) kоб

 Wрег(p)
= ; Wоб(p)
=
Wрег(p)
= ; Wоб(p)
=
Tизp (T1p+1)(T2p+1)(T3p+1)
Вывести характеристическое уравнение замкнутой системы.
Передаточная функция замкнутой системы имеет вид:
![]()
Передаточная функция разомкнутой системы представляет собой произведение передаточных функций последовательно соединённых звеньев регулятора и объекта:
![]() .
.
![]()
Характеристический полином замкнутой системы равен сумме числителя и знаменателя передаточной функции разомкнутой системы:
![]()
=0
Раскроем скобки, приведем подобные и получим следующий вид характеристического полинома:
![]()
После подстановки исходных данных характеристический полином будет иметь следующий вид:
D(p)=4000*Tиз*р4+800*Тиз*р3+250*Тиз*р2+Тиз*р+kрег*kоб*(Тиз*р+1)
Построим кривые d-разбиения для нашей аср
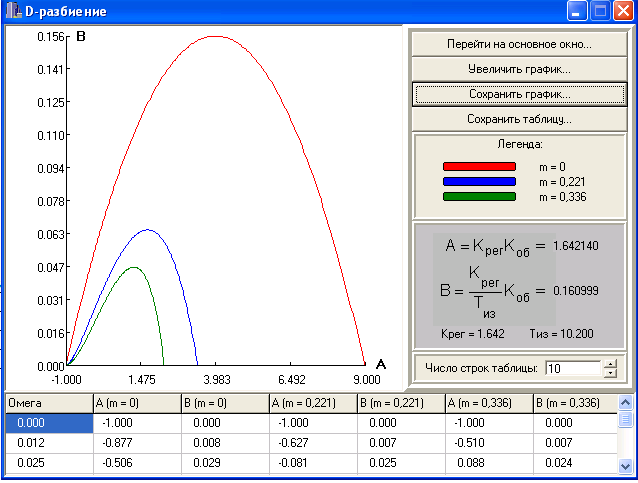
Рисунок 2 – Кривые D-разбиения
Выбираем точки, располагающиеся на специальной кривой Kр:
№ точки |
Крег |
Тиз |
1 |
0.171 |
7.183 |
2 |
0.371 |
12.814 |
3 |
0.605 |
16.995 |
3. Графики афх для каждой исследуемой точки.
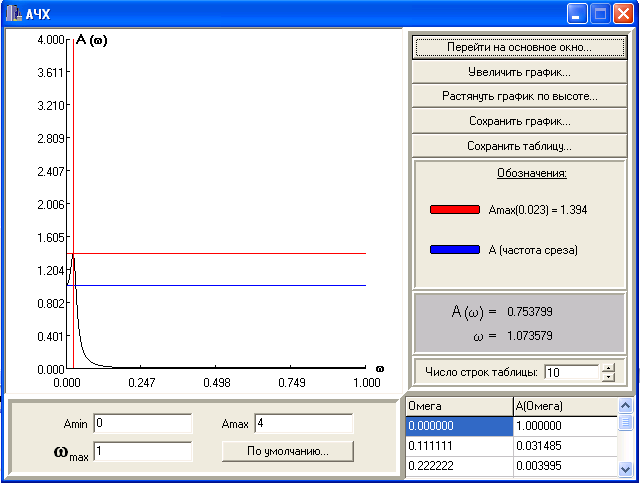
Рисунок 3 – АЧХ замкнутой АСР для первой точки

Рисунок 4 – АЧХ замкнутой АСР для второй точки

Рисунок 5 – АЧХ замкнутой АСР для третей точки
4. Определяем по графикам ачх частотные характеристики аср: резонансную частоту ωр , частоту среза ωср , диапазон пропускаемых системой частот (0 - ωо) , показатель колебательности m.
Резонансная
частота –
это частота, при которой АЧХ замкнутой
САУ имеет максимум Aзmax(![]() )
На этой частоте гармонические колебания
проходят через систему с наибольшим
усилением. Резонансная частота замкнутой
системы
)
На этой частоте гармонические колебания
проходят через систему с наибольшим
усилением. Резонансная частота замкнутой
системы
![]() близка к частоте колебаний системы
в переходном процессе. Значение
может быть приближенно определено
по точке АФХ которая ближе всего
расположена к точке (-1; j·0).
близка к частоте колебаний системы
в переходном процессе. Значение
может быть приближенно определено
по точке АФХ которая ближе всего
расположена к точке (-1; j·0).
Частота среза
– при
этой частоте АЧХ системы принимает
значение, равное 1, т.е. Aз(![]() )=1.
Эта частота косвенно характеризует
длительность переходного процесса. Чем
меньше
,
тем хуже быстродействие системы. Величина
зависит от инерционности объекта и
зоны нечувствительности прибора,
измеряющего колебания выходной
величины. Чем они больше, тем меньше
.
)=1.
Эта частота косвенно характеризует
длительность переходного процесса. Чем
меньше
,
тем хуже быстродействие системы. Величина
зависит от инерционности объекта и
зоны нечувствительности прибора,
измеряющего колебания выходной
величины. Чем они больше, тем меньше
.
Диапазон
пропускаемых системой частот
– это интервал частот от
=0
до
![]() при котором выполняется условие Aз(
)
= 0.707Aз(0)
или при Aз(0)
= 1 величина Aз(
)
= 0.707. Полоса пропускания не должна быть
слишком широкой, иначе система будет
воспроизводить
высокочастотные помехи, и в то же время
не может быть слишком узкой, иначе
система не сможет пропускать полезный
сигнал.
при котором выполняется условие Aз(
)
= 0.707Aз(0)
или при Aз(0)
= 1 величина Aз(
)
= 0.707. Полоса пропускания не должна быть
слишком широкой, иначе система будет
воспроизводить
высокочастотные помехи, и в то же время
не может быть слишком узкой, иначе
система не сможет пропускать полезный
сигнал.
Показатель
колебательности определяется
М как отношение максимального значения
АЧХ замкнутой системы Азmax(![]() )
к ее значению при
=0.
М характеризует склонность системы к
колебаниям. В общем случае при М<1
переходная характеристика системы не
колебательна. Чем выше М, тем больше
колебательность, т.е. тем менее качественна
система при прочих равных условиях.
При Aз(
)
)
к ее значению при
=0.
М характеризует склонность системы к
колебаниям. В общем случае при М<1
переходная характеристика системы не
колебательна. Чем выше М, тем больше
колебательность, т.е. тем менее качественна
система при прочих равных условиях.
При Aз(
)![]() M
и колебательность возрастает до получения
незатухающих с частотой
,
колебаний, соответствующнх границе
устойчивости САУ ( передаточная функция
замкнутой системы имеет пару сопряженных
мнимых полюсов ±j
).
M
и колебательность возрастает до получения
незатухающих с частотой
,
колебаний, соответствующнх границе
устойчивости САУ ( передаточная функция
замкнутой системы имеет пару сопряженных
мнимых полюсов ±j
).
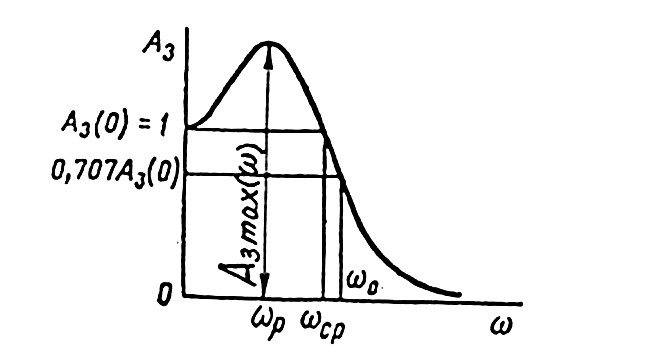
Рисунок 6 –
Определение по графику
![]() ,
,
![]() ,
,
![]()
№ точки |
|
|
0 - |
M |
1 |
0.023 |
0.0234 |
0 - 0.0236 |
1.394 |
2 |
0.027 |
0.0267 |
0 – 0.031 |
1.398 |
3 |
0.03 |
0.0301 |
0 – 0.032 |
1.467 |
Из таблицы видно,
что значение показателя колебательности
первой и второй точки лежит в интервале
![]() ,
что является допустимым. Известно, что
чем выше показатель колебательности,
тем менее качественна система.
,
что является допустимым. Известно, что
чем выше показатель колебательности,
тем менее качественна система.