

Основы КСУ (Бормотов А) / Основы конструирования
.pdf
|
|
|
|
|
|
|
|
|
|
(4.8) |
|
|
x |
3 |
|
|
|
|
|
||
|
V |
|
|
|||||||
(0,11 0,16 |
|
|
|
) , |
|
|||||
|
|
|
|
|
|
|||||
|
x |
Dв |
|
|||||||
где - коэффициент общей полноты корпуса судна; V – объѐмное водоизмещение корпуса судна, м3; Dв - диаметр винта, причѐм для судов с тоннельной кормой принимают Dв=Tк, м; x - число винтов; =0,3 (Fr-0,2) - поправка, вводимая для быстроходных судов (при Fr>0,2).
Для винтов в направляющих насадках используют другую зависимость:
|
|
|
|
|
|
|
|
|
|
(4.9) |
|
|
x |
3 |
|
|
|
|
|
||
|
V |
|
|
|||||||
k(a 0,16 |
|
|
|
) , |
|
|||||
|
|
|
|
|
|
|||||
|
x |
Dв |
|
|||||||
где а=0,043 и k=1,0 – для обычных обводов кормы; а= -0,05, х=1,0 и k >1,0 – для тоннельных обводов с любым числом винтов, причѐм значение коэффициента k снимают с графика рис. 4.2 в зависимости от относительного заглубления кормы тоннеля h/Dв.
Рис. 4.2. Поправки к коэффициентам взаимодействия для тоннельных обводов кормы
|
Для определения коэффициента засасывания применяют разные выраже- |
|
ния в зависимости от числа и расположения винтов: |
|
|
|
при размещении открытого винта в ДП нетоннельного судна |
|
|
t 0,6 (1 0,67 ) ; |
(4.10) |
|
при установке открытых винтов по бортам нетоннельного судна |
|
t0,8 (1 0,25 ) ;
при установке открытых винтов в тоннелях t t ,
причѐм поправку t принимают по графику рис. 4.2 в зависимости от относительного погружения винта Тв/Dв.
60

Для винтов в направляющих насадках коэффициент засасывания определяют [7] по выражению
|
|
|
|
|
|
|
|
|
|
||
|
2 t |
0 |
|
|
1 2 к 1 |
|
|
||||
|
|
|
|
|
|
|
|
||||
t |
|
|
|
|
|
, |
(4.11) |
||||
|
|
|
|
|
|
|
|
||||
2 ( |
1 2 |
k 1) |
|||||||||
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||
где t0 – коэффициент засасывания на швартовом режиме, который можно принять t0=(0,28 0,32) для судов с обычными обводами кормы и t0=(0,40 0,46) для судов с тоннельной кормой; - расчетное значение коэффициента попутного потока, определяемое выражением (4.9); к – коэффициент нагрузки комплекса винт-насадка по упору, определяемый по (4.14); - коэффициент расширения насадки.
Поскольку обводы корпуса морских судов заметно отличаются от обводов речных судов, то коэффициенты взаимодействия для них рассчитывают по другим выражениям. Для коэффициента попутного потока при установке открытых винтов можно использовать формулу [20]:
|
|
|
|
|
|
0,165 x |
3 V |
. |
(4.12) |
||
|
|||||
|
Dв |
|
|||
При установке винтов в насадке морских судов коэффициент расчѐтного попутного потока к несколько уменьшают по сравнению со значением , полученным по формуле (4.12): к=(0,60 0,70) , а коэффициент засасывания tк принимают tк=0,7t – для одновинтовых судов и tк=t – для двухвинтовых, если коэффициент t определѐн по формуле (4.10).
4.1.2. Выбор типа, числа и параметров движителей
Мерой количественной оценки совершенства движителей судна в отношении ходкости служит пропульсивный коэффициент , представляющий собой отношение буксировочной мощности, приходящейся на один винт, к мощности, потребляемой движителем Np:
|
Rv |
|
P v |
|
Pvp (1 t) |
д |
1 t |
|
|
|||||
|
|
e |
|
|
|
|
|
, |
(4.13) |
|||||
xN |
p |
N |
p |
N |
p |
(1 ) |
1 |
|||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
где д – КПД изолированного движителя.
Решающее значение в этом выражении принадлежит КПД движителя д. Для ориентировочной оценки величины д в начальных стадиях проектирова-
61
ния можно воспользоваться предложениями Л.И. Фомкинского [18], связав
значения д с коэффициентами нагрузки движителей по упору: |
|
|||||||
р |
8Р |
|
; |
к |
8Рк |
|
, |
(4.14) |
D2 2 |
D2v2 |
|
||||||
|
|
|
|
|
||||
|
в |
p |
|
|
в |
p |
|
|
где Р- упор открытого винта, Н; Рк - упор комплекса винт-насадка, Н. Осреднѐнные значения р( р) для открытых винтов и н( н) для винтов в
насадках приведены на диаграмме (рис. 4.3), изучая которую, можно прийти к следующим выводам: КПД движителей падает с ростом коэффициента нагрузки, причѐм у открытых винтов это падение более интенсивно. В связи с этим для слабонагруженных движителей, коэффициент нагрузки которых по упору меньше единицы, применение направляющих насадок нецелесообразно, так как приводит к уменьшению их КПД и усложнению конструкции комплекса по сравнению с открытыми винтами. Для тяжелонагруженных движителей ( к>2,5) применение насадок даѐт значительное увеличение КПД и является несомненно оправданным, несмотря на то, что конструкция комплекса сложнее, стоимость выше, а ремонт дороже. В диапазоне 1,0< к<2,5 применение насадок спорно. Одним из мотивов их применения на судах с к<2,5 может быть возможность улучшения управляемости судна. В этом случае насадки должны быть поворотными и заменять собою рули.
На ряде речных грузовых судов в последние годы были установлены гребные винты в необычных П – образных насадках [7]. Верхняя половина такой насадки представляет собой конструкцию, аналогичную кольцевой насадке (рис. 4.6), а нижняя часть разомкнута и образует две вертикальные стенки, напоминающие обычные рули. В такой насадке лопасти винта в верхней половине диска работают, как в кольцевой насадке, а в нижней - влияние насадки практически отсутствует. Такой движитель представляет собой промежуточный тип между открытым винтом и комплексом винт – насадка. Как показывают расчѐты, рациональная область применения винтов в П – образных насадках характеризуется средними значениями коэффициентов нагрузки дви-
жителя к=1,5 2,5.
Помещѐнная на рис. 4.3 диаграмма даѐт возможность сопоставить значения ожидаемых КПД движителей и отобрать наиболее эффективный вариант (с максимальным КПД или с минимальным значением потребляемой мощности Np или Ne). Методика расчѐта с примером приведена в п. 4.3.
62

Рис. 4.3. Диаграмма эффективности судовых ДРК:
1 – рули за открытым рулѐм; 2 – рули за винтом в насадки; 3 – поворотные насадки со стабилизатором; 4 – многоперьевые рулевые комплексы
При заданных величинах упора и расчѐтной скорости хода уменьшение коэффициента нагрузки движителя может быть получено увеличением числа и размеров винтов. Возможности увеличения диаметра винтов ограничены пределами осадки судна. Обычно диаметр винта составляет 0,6…0,7 осадки кормы. Если корма судна имеет тоннельные обводы, защищающие винты от прорыва к ним воздуха, то диаметр винта можно принять равным осадке и даже на 10…20% больше. Увеличение диаметра винтов приводит к уменьшению частоты их вращения, что делает необходимым применение дизель-редукторных установок. Что касается увеличения числа винтов, то из-за конструктивных соображений количество их редко принимается больше двух. Лишь на крупных пассажирских судах применяют трѐх-, четырѐхвальные гребные установки.
4.2. Средства управления судами
Движительно-рулевой комплекс (ДРК) является основным источником сил и моментов, приводящих судно в прямолинейное или криволинейное движение.
Классификация средств управления судном приведена на рис. 4.4 и подробно описана в [21].
63
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Средства управления |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Главные средства управления |
|
|
|
|
|
|
Вспомогательные средства |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
управления |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Рулевые |
|
|
|
|
|
Главные |
|
|
|
|
|
Подруливающие |
|
|
Вспомогательные |
|||||||||||||||||||||||||
|
|
устройства |
|
|
|
|
|
движительно- |
|
|
|
|
|
устройства |
|
|
движительно- |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-рулевые |
|
|
|
|
|
|
|
|
|
|
|
-рулевые устройства |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
устройства |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Рули |
|
Поворотные насадки |
|
Активные рули |
|
|
Поворотные винто-рулевые колонки |
|
|
Погруженные двигательно- -движительные поворотные системы ―Азипод‖ |
|
|
Крыльчатые движители |
|
|
|
|
|
|
|
|
|
Крыльчатые движители |
|
|
Поворотные винто-рулевые колонки |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.4. Классификация средств управления судном
Самым распространенным устройством для управления судном являются рули. Этому способствует простота конструкции, надежность их действия и безотказность.
По положению оси баллера относительно пера рули подразделяют:
н а н е б а л а н с и р н ы е (ось баллера совпадает с передней кромкой пера);
б а л а н с и р н ы е (ось баллера смещена на некоторое расстояние от передней кромки);
п о л у б а л а н с и р н ы е (балансирная часть выполнена не по всей высоте пера руля).
По способу соединения с корпусом судна рули разделяются:
н а п р о с т ы е с несколькими опорами на корпусе;
п о л у п о д в е с н ы е – висящие на баллере и имеющие одну опору на корпусе или кронштейне;
п о д в е с н ы е – висящие на баллере и не имеющие других опор. Повышенные требования к управляемости речных судов заставляют кон-
структоров создавать компактные, вследствие их малой осадки, и высокоэффективные рулевые средства.
Классический руль нашѐл широкое применение на различных судах (рис. 4.5) как в сочетании с открытыми винтами, так и с винтами в неповоротных насадках (рис. 4.5, а, б). Следует отметить, что максимальный угол перекладки рулей речных судов нередко делают 45 и более, что на морских судах
64
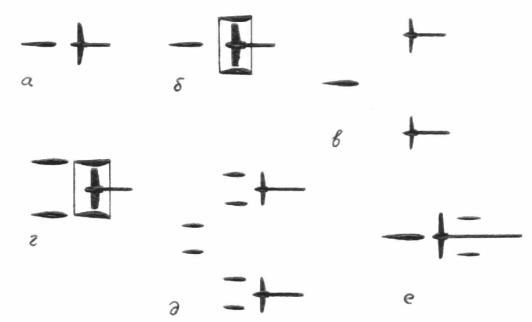
практически не встречается. Это связано с особенностями формы речных судов. Обладая небольшой высотой, такие рули имеют малое удлинение, при котором критический угол атаки руля заметно больше 35 . При установке руля вне потока винтов (рис. 4.5, в) эффективность его на полном ходу заметно ниже, чем у такого же руля, размещѐнного в струе винта. Однако устойчивость такого судна на курсе несколько выше, чем у аналогичного с боковыми рулями, что и обусловило применение этого типа ДРК на некоторых мелкосидящих судах смешанного плавания. При невозможности размещения одного большого руля в кормовом подзоре прибегают к установке двух, трѐх рулей малых размеров за каждым винтом (рис. 4.5, г, д). Такое дробление суммарной площади рулей позволяет, кроме того, несколько снизить общий момент на баллере рулевого привода.
Большим недостатком таких ДРК является фактически полное отсутствие управляемости судов при движении задним ходом. В практике зарубежного речного судостроения нашли широкое применение фланкирующие рули заднего хода (рис. 4.5, е), устанавливаемые попарно по бокам гребного вала впереди движителя. Такие рули, не улучшая управляемости на переднем ходу, обеспечивают маневрирование при движении судна задним ходом.
Рис. 4.5. Схемы ДРК с рулями
Очень широко распространены на отечественных судах ДРК, состоящие из винтов и поворотных насадок со стабилизаторами (рис. 4.6). При одинаковой площади боковой проекции с рулями поворотные насадки оказываются более эффективными, чем рули. Это объясняется тем, что их рулевая сила создаѐтся
65
двумя факторами – подъѐмной силой кольцевого крыла (аналогично работе рулей) и, кроме того, поперечной реакцией струи винта, отклоняемой поверхностью переложенной насадки. Благодаря этому суда с поворотными насадками хорошо управляются на переднем ходу и достаточно послушны при движении задним ходом. Двухвальные суда с раздельно управляемыми поворотными насадками (рис. 4.6, б) обладают дополнительной способностью разворачиваться на месте или двигаться лагом при соответствующей перекладке насадок и работе винтов «враздрай».
Наряду с этим заметно, что суда, оборудованные поворотными насадками, плохо управляются на малых ходах и при движении по инерции. Заметно ниже, чем у судов с рулями, и устойчивость на курсе. Для борьбы с этим недостатком поворотные насадки приходится делать несколько длиннее, чем неповоротные, и дополнительно оборудовать их осевыми стабилизаторами (рис. 4.6, а, в). Практика эксплуатации показала, что стабилизаторы часто повреждаются плавающими предметами, а при ремонте ДРК усложняют демонтажные работы. Применялись поворотные насадки, у которых стабилизаторы выполнены в виде радиальных рѐбер на наружной поверхности (рис. 4.6, г) и насадки с парными стабилизаторами (рис. 4.6, д). На некоторых судах для улучшения устойчивости на курсе и повышения управляемости на малых ходах применѐн комплекс, состоящий из двух поворотных насадок и диаметрального руля. Интересно отметить, что ограниченная площадь кормового подзора заставила установить сдвоенный руль на одном баллере (рис. 4.6, е).
Большим недостатком поворотных насадок является их способность вызывать повышенную вибрацию кормы, особенно при больших углах перекладок на мелководье. Кроме того, они забиваются плавающими предметами (брѐвна, лѐд), что нередко приводит к поломкам винтов, валов, насадок. Оригинальные насадки П-образной формы инженера Беззубова Г.И. (рис. 4.6, ж) способны выравнивать поле скоростей в диске винта, позволили получить такие же высокие показатели маневренности, как с круглыми насадками, и одновременно избавиться от присущих им недостатков.
66
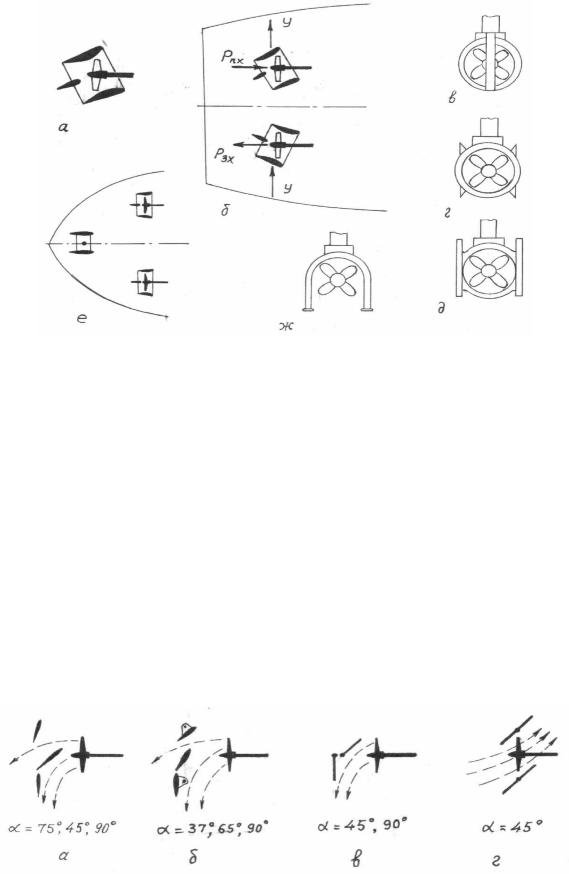
Рис. 4.6. Схемы ДРК с поворотными насадками
Поворотные насадки, имеющие предельный угол перекладки 32 - 35 , обеспечивают циркуляции судна с наименьшим диаметром 2,2 – 2,5 длины корпуса (по корме судна). Появившиеся в последние годы многоперьевые рулевые комплексы (рис. 4.7) позволяют активно воздействовать на струю движителя, отклоняя еѐ на борт до 90 . Рулевая сила, возникающая как поперечная реакция отклоняемой струи, практически не уменьшается при входе судна в циркуляцию. Это дало возможность получить на судах с такими комплексами минимальный диаметр циркуляции по корме около 1,1 – 1,3 длин корпуса. Среди таких комплексов можно назвать рули Йенкеля (рис. 4.7, а), примененные на судах Западной Европы. Хорошие результаты получены и с тройными
а) |
б) |
в) |
г) |
Рис. 4.7. Схемы высокоэффективных рулевых комплексов:
а – рули Йенкеля (=750, 450,900); б – ТЭР (=370, 650,900);
в– рули Спехова (=450,900); г – рули фланкирующие (=450)
67
эксцентрическими рулями (ЧССР), усовершенствованными и применѐнными на отечественных судах (рис. 4.7, б). Высокие показатели управляемости достигнуты на судах с двухперьевыми рулями (рис. 4.7, в). Интересно отметить, что при отклонении струи движителя многоперьевыми рулями одновременно с ростом рулевой силы происходит падение тяги движителя. При отклонении струи на 90 тяга становится равной нулю – происходит разворот судна без перемещения вперѐд. На двухвальных судах это свойство многоперьевых рулей при раздельной их перекладке в противоположные стороны может быть использовано для подтормаживания движения судна при неизменном режиме работы двигателей. Ценным свойством рассмотренных схем является то обстоятельство, что многоперьевые рули одинаково эффективны в комплексе как с открытыми винтами, так и с винтами в насадках.
В последнее время на судах нашли широкое применение поворотные вин- то-рулевые колонки. Поворотной винто–рулевой колонкой (ВРК) называют средство активного управления судном. Она представляет собой гребной винт (или комплекс гребной винт – насадка), направление тяги которого может быть изменено в широких пределах за счет поворота устройства относительно вертикальной оси.
Разные типы винто-рулевых колонок позволяют использовать их в различных схемах компоновки судна. Они могут применяться в качестве главных или вспомогательных движителей и обеспечивать как ходовые, так и маневренные качества судна. Выдвижные колонки могут использоваться для дополнительной маневренности, разворота на месте. Откидывающиеся колонки монтируются на палубе земснарядов, плавучих кранов, баржей и т.п. Установка колонки в носовой части судна позволяет создать дополнительный упор в любом направлении, двигаться лагом, разворачиваться на месте.
Установки «Азипод» популярны для использования на многих типах судов: контейнеровозах, балкерах, пассажирских судах и т.д. В подавляющем большинстве это достаточно крупные суда. Кроме того, наблюдается стойкая тенденция универсализации. Исходя из этого, можно предположить, что «Азиподы» имеют все шансы занять ведущую позицию в использовании на судах любых типов и размеров.
68
4.3. Расчѐтный метод выбора типа и характеристик ДРК
Выбор типа и характеристик рулевых средств судна необходимо вести с учѐтом принимаемых в проекте параметров движителей. Достаточно чѐтко эффективность ДРК с позиций ходкости оценивается пропульсивным КПД. За критерий эффективности рулевых качеств ДРК различных типов можно принять относительную величину, которую назовѐм коэффициентом эффективности рулевых средств:
k |
2Py |
(4.15) |
|
, |
|
D2v2 |
||
|
в p |
|
где Ру – максимально достижимое для рассматриваемого рулевого средства значение рулевой силы; Dв, vp – диаметр винта и скорость подтекания потока к движителю.
На рис 4.8 и рис. 4.9 приведены номограммы для определения коэффициентов эффективности k основных типов рулевых средств судов внутреннего плавания. На рис. 4.3 построена сводная диаграмма эффективности, где намечены зоны применимости типовых движителей: k( р) – для рулей за открытыми винтами и k( к) – для поворотных насадок и рулей за винтами в насадках. Этой диаграммой можно воспользоваться для выбора типа ДРК, а по соответствующей номограмме определить размеры рулевых средств.
Необходимое значение коэффициента эффективности рулевых средств k проектируемого судна надо назначить по требующимся критериям управляемости судна. Наиболее удобно это можно сделать с помощью рулевой характеристики, предложенной А.В. Васильевым [4],
m |
|
|
2 Py Lp |
(4.16) |
|
|
, |
||||
р |
F Lv2 |
||||
|
|
|
|||
|
|
|
|
||
|
|
|
d |
|
где yLp – суммарный момент поперечных сил всех рулевых средств судна, отстоящих на расстоянии Lp от его центра тяжести; Fd – погруженная в воду площадь диаметрального батокса; L, v – длина судна по КВЛ и скорость полного хода судна.
69