Основы КСУ (Бормотов А) / Основы конструирования
.pdfРис. 5.58. Схемы ноковых подвесок гравитационных шлюпбалок:
а – двухшкивная подвеска с рогом; б – одношкивная подвеска с фиксирующими щеками
В схеме рис. 5.58, б между щеками 7 шлюпбалки 1 установлен лишь один направляющий блок 2, который огибает лопарь 3, оборудованный особой втулкой 4 с выступающими буртиками. К втулке 4 снизу прикреплен отрезок цепи 5 с уширенным кольцом 6, как и в схеме а. В начале склонения втулка фиксируется между щеками 7 своими буртиками, опираясь на приварные полосы 8.
Преимущество схемы а перед схемой б в том, что сила натяжения лопарей Т вдвое меньше нагрузки от веса шлюпки Q, тогда как в схеме б сила
210
натяжения Т равна нагрузке Q. Это дает возможность использовать в схеме рис. 5.58, а более тонкие лопари и, как следствие, более компактные направляющие блоки. Недостаток схемы а перед схемой б виден в более сложной конструкции подвески. Кроме того, при использовании одинаковых шлюпочных лебедок, скорость склонения (при вываливании или заваливании шлюпбалок) в работе схемы б будет вдвое выше.
Конструирование подвески по той или иной схеме аналогично. Необходимо удачно выбрать длину рога 8 или направляющих полос 8, исключающую преждевременный сход подвижного блока 4 или втулки 4. На рис. 5.59 показано, как назначается эта длина на примере подвески, изображенной на рис. 5.58, а.
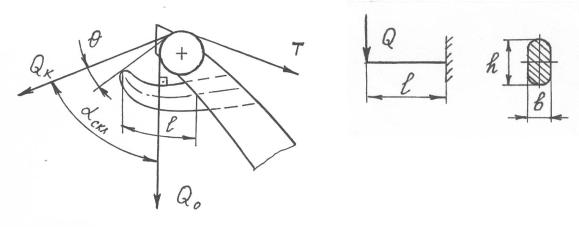
Рис. 5.60. Расчетная схема рога
Рис. 5.59. Схема выбора длины рога ноковой подвески
Как было принято выше, векторы T и Q изображают силы натяжения лопарей и вес шлюпки. Индексами «0» и «к» отмечено положение силы веса шлюпки в начале склонения Qо и в конце склонения Qк. Ясно, что эти силы направлены вертикально вниз. По отношению к оси стрелы шлюпбалки их направление постепенно меняется в процессе склонения шлюпбалки. На эскизе удобнее отклонить вектор силы Q по отношению к оси шлюпбалки на угол полного склонения шлюпбалки скл . Величину этих углов легко найти на эскизах рис. 5.46 и рис.5.47. Длина рога l выбирается такой, чтобы он не препятствовал сходу скобы подвижного блока подвески 4 при любых углах
211

крена судна . Предельная длина рога l назначается по величине антикрена судна =220, что несколько превышает требования Правил Регистра [16]. Сечение рога подбирают по условию прочности на изгиб в конце склонения шлюпбалки (рис. 5.60).
Верхняя поверхность рога делается плавной – по нормали к линии действия силы Q, с целью снижения вероятности подтормаживания скобы блока при наклоне шлюпбалки. Нижняя поверхность повторяет линию верхней поверхности с учетом рассчитанных размеров сечения рога по его длине. Фор-
ма сечения рога близка к прямоугольной со скруглением углов (W bh3 ), 12
отвечающих кривизне скобы 7 блока.
Для контроля устойчивости работы шлюпбалки при вываливании шлюпки необходимо рассчитать натяжение лопарей Тl в момент схода подвески с рога (при склонении шлюпбалки на угол скл – 220). Сила натяжения
Тl должна быть не менее, чем Tl 1,15Q (рис. 5.57).
Выбор размеров лопарей. Для лопарей используют шестипрядные гибкие нераскручивающиеся канаты из высокопрочной стальной оцинкованной проволоки (ГОСТ 3083 – 80) или растительные и капроновые (ГОСТ 30055 – 93), если подъем шлюпок осуществляется ручным приводом. Через систему направляющих блоков лопарь заводится на барабан шлюпочной лебедки.
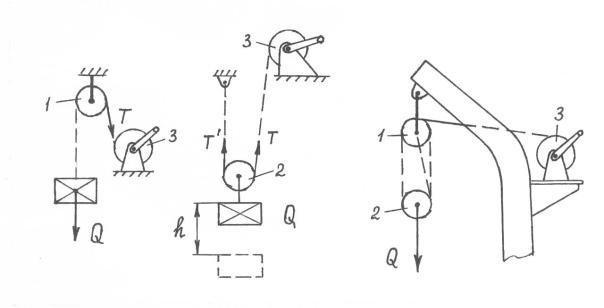
Блоки делят на подвижные, у которых ось вращения перемещается при работе, и неподвижные - положение оси не меняется. Применение неподвижных блоков (рис. 5.61, а) дает возможность организовать наиболее удобную компоновку устройства.
212
а) |
б) |
в) |
Рис. 5.61. Схемы работы блоков и талей:
1 – неподвижный блок; 2 – подвижный блок; 3 – лебедка
При работе с грузом весом Q сила натяжения лопаря Т будет больше (при подъеме груза) или меньше (при спуске груза) веса Q на величину силы трения R в опорах блока и трения каната о блок Tпод Q R или Tсп Q R . В расчетах принято выражать силу трения через коэффициент трения R Q , что упрощает расчет сил T Q Q Q 1 . Здесь знак (+) берется при подъеме груза, а знак (–) – при спуске. Удобнее в расчетах (как будет видно далее) пользоваться еще одним измененным коэффициентом к 1 , который называют коэффициентом сопротивления вращению блока. Расчет силы тяги Т использованием коэффициента к ведут по выражениям T kQ
при подъеме груза и T Q / k при спуске.
Значения этих коэффициентов принимают k 1,02 при использовании стальных тросов и блоков с опорами качения; k 1,05 при стальных тросах и опорах скольжения; k 1,05...1,10 – растительные тросы и опоры блока качения или скольжения.
В соответствии с этим натяжение лопаря T при подъеме груза весом Q
будет Tпод 1,02...1,10 Q , а при спуске Tс |
|
Q |
0,98...0,91 Q . |
||
|
|
|
|||
1,02...1,1 |
|||||
|
|
||||
Использование подвижного блока дает снижение силы тяги примерно вдвое (см. рис. 5.61, б). Если поднимать груз весом Q, то эта сила распреде-
213
лится на две ветки троса Q T T , где T T / k – сила натяжения набегающей ветки троса. Это приводит к снижению силы тяги лебедки:
|
|
|
|
|
|
T |
T Tk |
|
|
kQ |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q T |
T k T |
k |
, откуда T 1 k . |
|
|||||||||
|
|
|
|
||||||||||||
Например, при k 1,05, |
T 0,512Q . |
|
|
|
|
|
|
|
|||||||
Если опускать тот же груз, то натяжение тросов несколько меняется: |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
(при k 1,05 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Q T |
T , где |
|
T |
Tk , что |
в итоге дает |
T 1 k |
|||||||||
|
|
|
|||||||||||||
T 0,488Q ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Необходимо иметь в виду, что уменьшение силы тяги почти в два раза даст возможность использовать более тонкие тросы, а к ним – более компактные блоки, но не изменит мощность шлюпочной лебедки. Поднимая груз подвижным блоком на высоту h, на барабаны лебедки надо будет намотать трос длиной l 2h (налицо факт – выигрыш в два раза в силе и проигрыш во столько же раз в перемещении груза).
В реальных схемах шлюпочных устройств (как и в других грузоподъемных устройствах) используют комбинацию подвижных и неподвижных блоков, образующих несложный грузоподъемный механизм – шлюпочную таль (рис. 5.61, в). В составе этой тали применяют разное число блоков (обычно два или четыре). Это дает возможность существенно уменьшить силу натяжения лопаря Т и осуществить удобную проводку каната к лебедке. Силу натяжения лопаря вычисляют по выражениям (при подъеме и спуске груза соответственно):
T Q |
k n k 1 |
|
||||
|
|
|
|
|
|
|
|
n |
|
|
|
||
|
k |
|
|
1 |
|
, |
T Q |
k 1 |
|
|
|||
k k |
|
|
|
|||
|
|
|
|
|
||
|
n |
1 |
|
|||
|
|
|
|
|
|
|
в которых, кроме уже указанных выше обозначений, введено n – общее число блоков в тали.
В устройствах с гравитационными шлюпбалками лопарь служит для спуска и подъема шлюпки, когда шлюпбалка вынесла шлюпку за борт, а также и для вываливания или заваливания шлюпки. Для расчета силы натяжения лопарей необходимо составить расчетную схему проводки лопаря, на которой указаны все направляющие блоки (рис. 5.62).
214
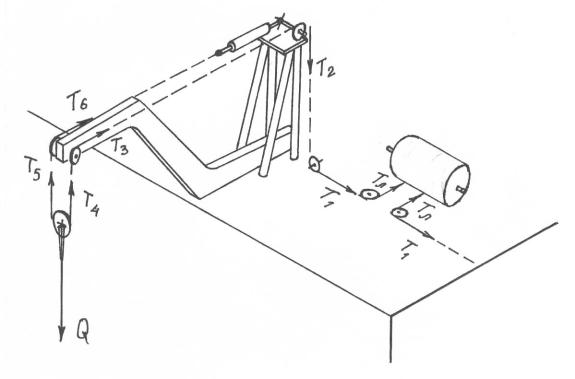
Рис. 5.62. Схема проводки лопаря гравитационной шлюпбалки
Обозначим натяжении лопаря перед барабаном лебедки Тл и выразим натяжения лопарей Ti в каждом участке через искомые значения Тл, используя коэффициент сопротивления вращению блока k (см. выше).
При подъеме шлюпки и заваливании шлюпбалки натяжения лопаря по участкам от лебедки к ноку будет уменьшаться на силу трения в каждом блоке:
T |
Tл |
, T |
T1 |
|
Tл |
, T |
T2 |
|
Tл |
и т.д. до T |
Tл |
, |
|
|
|
|
|
||||||||||
|
|
||||||||||||
1 |
k |
2 |
k |
|
k 2 |
3 |
k |
|
k 3 |
i |
k i |
||
|
|
|
|
|
|
||||||||
где i – номер блока в системе проводки.
При спуске шлюпки и вываливании шлюпбалки натяжение лопаря по участкам от лебедки к ноку наоборот растет:
T T k , T |
T k T k 2 |
, T T k T k3 , в том числе T |
T k i . |
|||||||||||
1 л |
2 |
1 |
л |
|
3 2 |
|
|
л |
|
i |
л |
|||
Условием, по которому определяют силу натяжения лопарей при спус- |
||||||||||||||
ке или подъеме шлюпки, будет равенство (рис. 5.62) |
Q T4 |
T5 , которое при |
||||||||||||
подъеме шлюпки имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Q T T |
Tл |
|
Tл |
|
kTk Tл |
T 1 k , |
||||||
|
|
|
|
|
||||||||||
|
|
п |
4 |
5 |
|
k 4 |
|
k 5 |
|
k 5 |
л |
k 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
215 |
|
|
|
|
|
|
|

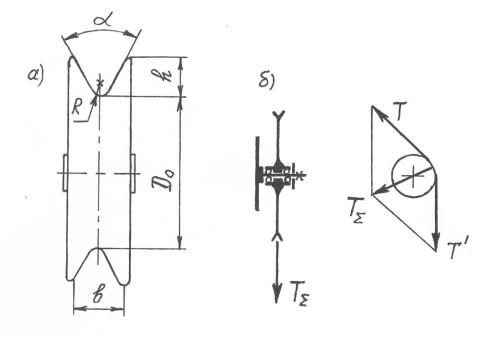
Рис. 5.63. Направляющий блок
Найтов и его детали. Выше был рассмотрен метод расчета усилий нагружающих найтов шлюпки, закрепленной на гравитационной шлюпбалке (п. 5.5.4). Сила натяжения верхней и нижней части найтова может быть разной. По наибольшей из них подбирают сечение найтова, задавшись разрывной нагрузкой каната по (5.8) Tраз nTmax . Коэффициент запаса прочности
принимают не менее пяти.
Верхний конец найтова крепится к проушине (обуху), приваренной к стреле шлюпбалки (см. рис. 5.48, а), а нижний имеет петлю, укрепленную коушем, заводимым на стопорный крюк, ось которого размещена на станине шлюпбалки. Для возможности выбирания слабины найтова его верхний конец оборудуется талрепом.
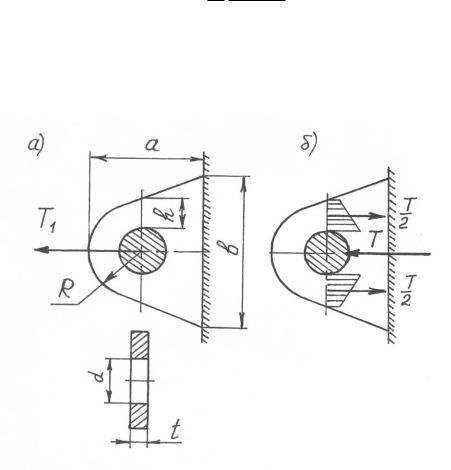
Стандартные изделия, входящие в конструкцию найтова (талреп, скоба, коуш) подбирают по соответствующим стандартам в зависимости от величины рабочего усилия (силы натяжения найтова Т1 или Т2). Нестандартные изделия (проушина, стопорный крюк) конструируются индивидуально.
Для проушины задаются минимально необходимыми габаритными размерами a и b, продиктованными размерами соединяемых деталей (скоба или вилка талрепа) и диаметром отверстия d, соответствующего диаметру пальца скобы или талрепа. Толщина проушины t назначается из условий
218