

Основы КСУ (Бормотов А) / Основы конструирования
.pdfРис. 5.36. Схема определения высоты шлюпбалки морского судна:
а - вид сбоку; б - сечение корпуса в районе установки шлюпок; 1 – обвод корпуса на миделе; 2 – обвод корпуса в корме; 3 – шлюпка на салазках
Для уменьшения высоты шлюпбалки необходимо:
размещать шлюпку по высоте ближе к воде (снижение Hш ) и ближе к ми-
делю (уменьшение H ), насколько это возможно;
учесть реальные обводы кормы корпуса судна в районе размещения шлюпок;
использовать креноустойчивые шлюпбалки (ростровые), когда шлюпка спускается ниже палубы, что заметно сокращает Hш ;
прибегнуть к спуску шлюпки скольжением по борту судна на спусковых салазках.
Если высота шлюпбалки h все-таки выходит неприемлемо большой, то это становится дополнительным мотивом для использования кормовых шлюпок свободного падения.
Тип шлюпбалки (радиальная, склоняющаяся, гравитационная) уточняется по массе шлюпки, конфигурация прорисовывается на эскизе с учетом назначенной высоты h и очертаний шлюпки (рис. 5.37). Отстояние шлюпбал-
180

ки от борта с должно быть минимальным, но достаточным для безопасного хранения шлюпок при швартовке судна. Для этого на эскизе проверяют, чтобы шлюпка не выходила за линию, отклоненную на 30 от вертикали на кромке палубы.
Рис. 5.37. Уточнение конфигурации и размещения шлюпбалок:
а – склоняющаяся; б – гравитационная
Конфигурацию шлюпбалки намечают как можно проще, тщательно отслеживая очертания ее корпуса и надстройки.
5.5.2. Нагрузки шлюпочного устройства
Исходной расчетной нагрузкой шлюпочного устройства служит сила веса спускаемой (поднимаемой) шлюпки. Если обслуживание шлюпки осуществляется одной шлюпбалкой, то нагрузка на шлюпбалку равна силе веса шлюпки со снабжением и людьми (Q=F). Если в устройстве предусмотрены две шлюпбалки (рис. 5.38), то расчетная нагрузка Q на каждую шлюпбалку назначается вдвое меньше.
Более того, необходимо учесть неравномерность нагрузки вдоль шлюпки:
|
|
|
|
|
P |
qn P |
, |
Q 0,5 |
|
P |
|||||
|
|
A |
ш |
c |
т |
|
|
181

где А – расстояние между шлюпбалками; – отстояние центра тяжести шлюпки от середины расстояния А; Pш– сила веса шлюпки; Pс – сила веса снабжения шлюпки; Pт – сила веса шлюпочных талей; q=981H – сила веса одного человека; n – число людей в шлюпке.
Рис. 5.38. Схема нагружения шлюпбалок
Количество людей в шлюпке различается при разных операциях со шлюпкой: при спуске шлюпки принимают n nmax , т.е. полная вместимость шлюпки; а при подъеме шлюпки и при вываливании-заваливании шлюпбалки n 2...5чел. (спусковая команда). Исключение из этого правила применяют к пассажирским судам, на которых вываливание шлюпбалок производят при полной вместимости шлюпки, а также к шлюпбалкам для дежурных шлюпок, когда все операции со шлюпкой проводятся при полной вместимости шлюпки.
Речной Регистр рекомендует учесть возможную неравномерность нагрузки завышением расчетного усилия на 25%:
Q 1,25 Pш Pc qn .
При расчете гравитационных шлюпбалок, обеспечивающих более высокие скорости спуска шлюпки, иногда расчетное усилие увеличивают для учета динамических нагрузок Qгр 1,15Q .
182

Кроме силы веса шлюпки F, необходимо учесть силу веса самой шлюпбалки P. Поскольку в начале проектирования эта сила неизвестна, ее назначают приближенно, ориентируясь на близкие шлюпбалки (по «прототипу»). Если этого не сделать, то надо будет вести расчет в два приближения: сначала определяют нагрузки и конструируют шлюпбалку без учета силы веса Р, а затем, подобрав размеры сечений шлюпбалки и ее деталей, вычисляют силу веса шлюпбалки Р и повторяют расчет с учетом этой силы. На рис. 5.39 приведены графические зависимости [25] веса шлюпбалок от их грузоподъемности.
Рис. 5.39. Зависимость веса шлюпбалок P от их грузоподъемности D:
1 – радиальные; 2 – склоняющиеся типа Иолко; 3 – склоняющиеся серповидные; 4 – гравитационные скатывающиеся
5.5.3. Расчет усилий, нагружающих детали шлюпбалок
Усилия, необходимые для расчетов прочности деталей шлюпбалок определяют методами теоретической механики, рассматривая равновесие шлюпбалки. Расчет повторяют многократно – для ряда последовательных положений шлюпбалки в пространстве от начала ее склонения до конца и обратно – для заваливания шлюпбалки. В каждой из этих операций принимают разную исходную нагрузку Q, как указано выше. В расчетах определяют усилия как при прямой посадке судна, так и с учетом крена на любой борт и дифферента судна.
183
Врасчетах устройств для спасательных шлюпок принимают [13, 17]:
200 и 100 – при вываливании и спуске шлюпок морских судов и судов смешанного плавания классов М-СП»;
80 и 50 – при подъеме и заваливании шлюпок морских судов;
150 и 50 – для всех операций со шлюпкой речных судов классов М и О;
00 и 00 – для прочих (не спасательных шлюпок).
Наиболее удобно вести расчет графоаналитическим способом, используя эскиз шлюпбалки со шлюпкой в определенном масштабе. С эскиза, предпочтительно выполненного на кальке или на экране компьютера (упрощается «перенос» изображения), можно легко снять углы и плечи, необходимые для составления уравнений равновесия шлюпбалки.
Расчет усилий радиальных шлюпбалок сравнительно несложен. С помощью эскиза (рис. 5.40) определяются необходимые плечи для составления уравнения моментов (a, b, z).
Внешней нагрузкой в задаче выступают: расчетная сила веса шлюпки Q, сила веса шлюпбалки P. Требуется определить реакции опор R1 R2 и N.
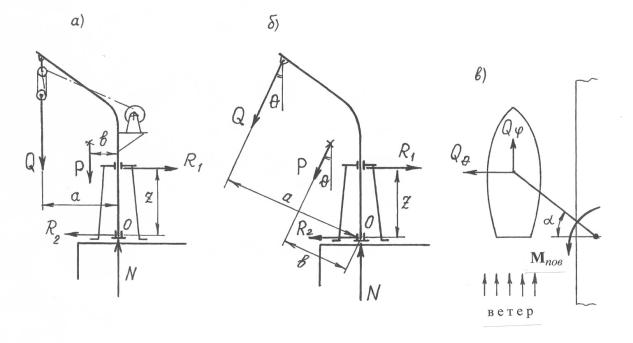
Рис. 5.40. Схема расчета усилий радиальной шлюпбалки:
а– прямая посадка судна; б – посадка судна с креном;
в– к расчету момента поворота шлюпбалки
184
Условие равновесия шлюпбалки определяется двумя уравнениями:
M |
0 0 |
; |
Qa Pb R1Z 0 |
. |
(5.1) |
|
0 |
|
|||
Z |
|
Q P N |
|
|
|
|
|
|
|
|
|
Уравнения (5.1) составляются и решаются дважды – при прямой посадке судна (а) и при посадке судна с креном и дифферентом . Наибольшие значения реакций будут при наибольшей силе Q, которая соответствует весу шлюпки со снабжением и полным количеством людей (спуск шлюпки).
Рис. 5.40, в поясняет влияние крена и дифферента судна на величину момента поворота шлюпбалки. Полный момент Mпов складывается от трения
в опорах M тр , ветровой нагрузки |
M в |
и момента сил веса Q при посадке с |
|||||
креном M и дифферентом M : |
|
|
|
|
|||
|
|
|
Mпов M тр Mв M M , |
(5.2) |
|||
где |
M тр Rf |
d |
– момент |
сил |
трения |
в опорах |
шлюпбалки; |
|
|||||||
|
2 |
|
|
|
|
|
|
Mв pвSшлa cos – момент от давления ветра pв ; |
M Qsin a sin – мо- |
||||||
мент от сил веса Q при крене судна ; M Qsin a cos – момент от сил веса Q при дифференте судна ; f – коэффициент трения каждой из опор шлюпбалки; d – диаметр втулки подшипника опоры; R – сила реакции каждой из опор; Sшл – площадь поперечного сечения шлюпки; – угол поворота шлюпбалки.
Расчет момента Mпов проводят для нескольких углов поворота шлюп-
балки от 00 до 900 , чтобы найти максимальное значение этого момента. По величине момента судят, можно ли осуществить поворот шлюпбалки вручную (с помощью оттяжек) или потребуется использовать механический привод.
Следует обратить внимание на то, что первое слагаемое – момент от сил трения M тр - можно определить, если размеры опор уже известны. В
связи с этим вначале ведут расчет прочности шлюпбалки, как это рассматривается ниже, конструируют опоры, используя рекомендации дисциплины «Детали машин», а лишь после этого определяют величину момента M тр .
185

Если необходима установка механизированного привода, то конструируется редуктор, чаще всего, червячная пара и уточняется тип привода для поворота шлюпбалки – ручной или механический.
Возможность использования ручного привода зависит от величины усилия на рукоятке привода или силы тяги, возникающей в тросе-оттяжке. При кратковременной работе (не более 5 мин) эти усилия должны быть не более 200 Н на рукоятке привода радиусом не более 400 мм и не более 300 – 400 Н в тросе-оттяжке.
Для примера на рис. 5.41 показана схема ручного механизма поворота с червячно-цилиндрическим редуктором.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Момент на |
входном |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
валу редуктора будет |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M вх |
M пов |
|
, (5.3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i1 п 1i2 2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
Mпов |
– момент, необ- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ходимый |
для |
поворота |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шлюпбалки (5.2); i1 и 1 – |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
передаточное отношение и |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КПД червячной пары; i2 и |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 – передаточное отноше- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ние и КПД червячной па- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ры; |
п – КПД подшипни- |
|||
Рис. 5.41. Схема радиальной шлюпбалки |
|
ков. |
|
|
|
||||||||||||||
|
|
|
|
|
|
||||||||||||||
с ручным механизмом поворота: |
|
|
|
|
|
|
В табл. 5.4 приведены |
||||||||||||
1 – стрела; 2 – стандерс; 3 – лебедка подъема; |
|
параметры |
двухступенча- |
||||||||||||||||
4 – корпус редуктора; 5 – цилиндрическая |
|
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||
зубчатая пара; 6 – червячная пара; 7 – рукоятка |
|
того редуктора шлюпбалки |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
грузоподъемностью 500 кг. |
||||
Для расчета момента на валу M вх необходимо оценить потери редук- |
|||||||||||||||||||
тора, определив значение КПД: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
tg |
|
|
|
tg 5 |
0 |
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
42 |
|
|
|
|
0,45 |
, |
2 |
0.98; |
п 0,94 . |
|||||||
tg |
tg 5 |
0 |
|
|
0 |
|
|
||||||||||||
|
|
42 |
6 |
51 |
|
|
|
|
|
|
|
||||||||
Расчетный момент на входном валу редуктора будет (5.3)
186

M |
|
|
|
0,756 |
3,0 |
10 2 кНм, |
вх |
|
|
||||
|
0,45 0,98 1,5 0,94 |
|||||
|
40 |
|
|
|||
|
|
|
|
|||
где Mпов 0,756 кНм взят из примера расчета.
Таблица 5.4. Параметры двухступенчатого редуктора
Наименование |
Обозначение |
Единицы |
Значения |
|||
|
|
измерения |
|
|
|
|
Передаточное отношение червячной пары |
i1 |
— |
|
40 |
|
|
Модуль червячной пары |
m1 |
мм |
|
|
5 |
|
Число зубьев червячного колеса |
zк |
— |
|
40 |
|
|
Число заходов червяка |
z |
— |
|
|
1 |
|
Относительная толщина червяка |
q |
— |
|
10 |
|
|
Угол подъема винтовой линии |
|
град |
|
0 |
|
|
|
|
|
5 |
|
42 |
|
Коэффициент трения червячной пары |
f |
— |
0,12 |
|
||
(сталь – бронза) |
|
|||||
|
|
|
|
|
|
|
Угол трения червячной пары |
|
град |
|
0 |
|
|
|
|
|
6 |
|
51 |
|
Передаточное отношение зубчатой пары |
i2 |
— |
|
1,5 |
|
|
Модуль зубчатой пары |
m2 |
мм |
|
|
8 |
|
|
|
|
|
|
|
|
Число зубьев шестерни |
z1 |
— |
|
24 |
|
|
Число зубьев колеса |
z2 |
— |
|
36 |
|
|
|
|
|
|
|
|
|
Если использовать для вращения входного вала рукоятку радиусом R=300 мм, то расчетное усилие на рукоятке будет
T M вх 3,0 10 2 0,10 кН. R 0,30
Полученное значение вполне допустимо для механизма с ручным приводом. Примерно так же выполняется расчет и для склоняющихся шлюпбалок
(рис. 5.42). Исходной нагрузкой являются силы веса шлюпки Q и шлюпбалки Р. Определить: S – силу сжатия или растяжения механизма склонения, R – реакцию опоры шлюпбалки, T – натяжение лопаря, покидающего шлюпбалку. Сила натяжения T определяется в начале расчета и становится одной из исходных нагрузок.
Методика расчета силы натяжения будет изложена далее.
187

Рис. 5.42. Схема расчета усилий склоняющейся шлюпбалки:
а – при прямой посадке судна; б – при посадке судна с креном
Искомые усилия S и R определяются из уравнений:
M |
0 |
0 |
Qa Pb Sc 0 |
. |
(5.4) |
||||||||||||
|
1 |
; |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
F |
|
Q |
P |
T |
S R 0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Решение системы (5.4) начинают с первого уравнения, из которого находят осевое усилие S в механизме склонения. Затем решают второе уравнение, из которого определится реакция опоры R.
Наиболее просто выглядит решение в графической форме
(рис. 5.43).
Для поиска максимального значения реакции опоры R и выяснения полной картины нагружения механизма склонения силой S эскиз (рис. 5.42, б) составляется многократно при разных углах наклона стрелы к горизонту. Более того, расчет ведут как для операции спуска шлюпки, когда действует наибольшая расчетная нагрузка Q (с учетом полной вместимости шлюпки), так и при подъеме, когда надо определить силу натяжения лопарей, от которой зависит мощность привода шлюпочной лебедки.
188

В расчетах механизма склонения проверяют ходовой винт и определяют усилия на рукоятках привода. Наибольшие нагрузки действуют в начале склонения шлюп-
балки и при крайнем вы-
Рис. 5.43. Графическое решение уравнения сил валенном положении
шлюпки.
Пример расчета механизма склонени
Рассматриваются склоняющиеся шлюпбалки для спасательной шлюпки на 12 чел. [26]. Расчетная нагрузка Q = 18,2 кН; сила веса шлюпбалки P =
2,94 кН.
В первом положении (рис. 5.42) винт испытывает сжатие силой S1 :
S |
Qa1 Pb1 |
18,2 0,53 2,94 1,00 8,4 кН. |
||||||||
|
|
|||||||||
1 |
|
|
|
|
с1 |
1,47 |
|
|
||
|
|
|
|
|
|
|
||||
Во втором положении (конец склонения) винт растягивается силой: |
||||||||||
S |
|
|
Qa2 Pb2 |
|
18,2 2,11 2,94 1,07 |
28,3 кН. |
||||
2 |
|
|
||||||||
|
|
|
|
с2 |
1,47 |
|
||||
|
|
|
|
|
|
|||||
В примере принят винт с однозаходной прямоугольной резьбой с раз- |
||||||||||
мерами: наружный |
диаметр |
dн 36 мм; |
внутренний диаметр dв 28мм; |
|||||||
средний диаметр d0 |
32 мм; шаг резьбы t |
= 8 мм; площадь сечения винта |
||||||||
f 6,2 см2. |
|
|
|
|
|
|
|
|
|
|
Наибольшие напряжения (растяжения) в сечении винта будут
р Sf2 28,36,2 4,56 смкН2 =45,6 МПа.
Винт изготовлен из стали Ст 5 (RеH = 280 МПа), для которой0,4ReH 112 МПа, что заметно выше расчетных напряжений.
189