

- Раздел 4 -
Рассмотрим Т-образную схему замещения
(СЗ) асинхронной машины. С помощью СЗ
можно рассчитать любые режимы работы,
в том числе те, которые могут быть опасны
для машины (короткое замыкание) или
труднодостижимы (идеальный холостой
ход). Можно рассчитать пусковые
характеристики:
![]() ;
можно рассчитать рабочие характеристики:
;
можно рассчитать рабочие характеристики:
![]() ;
можно рассчитать КПД машины и рассчитать
составляющие потерь.
;
можно рассчитать КПД машины и рассчитать
составляющие потерь.
Но прежде, чем ввести СЗ, необходимо сделать несколько допущений:
■ Во-первых, в СЗ электрически соединены первичная (1-я) и вторичная (2-я) цепи. В реальности же электрически они не связаны, а взаимодействуют друг с другом посредством своих магнитных полей.
■ Во-вторых, вращающийся ротор приходится заменять эквивалентным неподвижным. Это обусловлено тем, что в случае вращающегося ротора частоты токов 1-й и 2-й обмоток не равны, и, как следствие, становится невозможным изображение 1-х и 2-х электрических величин на одной общей ВД. Единственным существенным отличием неподвижной машины будет то, что в ней не происходит преобразования механической энергии в электрическую и обратно. Поэтому при переходе к неподвижной машине механическая мощность должна быть представлена равной ей электрической мощностью. (Подробнее про это см. ниже).
■ В-третьих, из-за различных порядков токов и напряжений на 1-й и 2-й обмотках, приходится выполнять операцию приведения (см. ниже). Векторная диаграмма (ВД) строится для приведённых значений токов, напряжений и сопротивлений.
■ В-четвёртых, в-пятых и в-шестых, с помощью рассматриваемой ниже СЗ можно рассчитать только установившийся режим работы, нельзя учесть эффект насыщения и эффект вытеснения тока.

Рисунок 4.
На рисунке 4 изображена Т-образная СЗ асинхронной машины. Её уравнения:
![]() ;
(14)
;
(14)
![]() ;
(15)
;
(15)
![]() ;
(16)
;
(16)
![]() -
напряжение, подводимое к обмотке статора;
-
напряжение, подводимое к обмотке статора;
![]() -
ток, протекающий по обмотке статора;
-
ток, протекающий по обмотке статора;
![]() -
приведённый ток, протекающий по обмотке
ротора;
-
приведённый ток, протекающий по обмотке
ротора;
![]() -
намагничивающий ток;
-
намагничивающий ток;
![]() -
активное сопротивление обмотки статора,
соответствует электрическим потерям
в обмотке статора
-
активное сопротивление обмотки статора,
соответствует электрическим потерям
в обмотке статора
![]() ;
;
![]() -
индуктивное сопротивление обмотки
статора, символизирует поток рассеяния
обмотки статора;
-
индуктивное сопротивление обмотки
статора, символизирует поток рассеяния
обмотки статора;
-
приведённое активное сопротивление
обмотки ротора, соответствует электрическим
потерям в обмотке
ротора
![]() ;
;
![]() -
приведённое индуктивное сопротивление
обмотки ротора, символизирует поток
рассеяния обмотки ротора;
-
приведённое индуктивное сопротивление
обмотки ротора, символизирует поток
рассеяния обмотки ротора;
сумма
![]() называется приведённым сопротивлением
неподвижного ротора;
называется приведённым сопротивлением
неподвижного ротора;
![]() -
приведённое активное сопротивление,
соответствующее механической мощности,
развиваемой на роторе
-
приведённое активное сопротивление,
соответствующее механической мощности,
развиваемой на роторе
![]() ;
;
![]() -
активное сопротивление намагничивающей
цепи, посредством которого учитываются
магнитные потери в сердечнике статора
-
активное сопротивление намагничивающей
цепи, посредством которого учитываются
магнитные потери в сердечнике статора
![]() ;
;
![]() -
реактивное сопротивление намагничивающей
цепи, символизирует главный поток в
воздушной зазоре.
-
реактивное сопротивление намагничивающей
цепи, символизирует главный поток в
воздушной зазоре.
Сумма сопротивлений
и
образует сопротивление
![]() ,
с помощью которого можно определить
электромагнитную мощность
,
с помощью которого можно определить
электромагнитную мощность
![]() .
.
Сопротивления
и
получаются преобразованием параллельного
соединения сопротивлений
![]() (первичное главное собственное индуктивное
сопротивление, учитывающее основную
гармонику магнитного поля в воздушном
зазоре) и
(первичное главное собственное индуктивное
сопротивление, учитывающее основную
гармонику магнитного поля в воздушном
зазоре) и
![]() (активное сопротивление такого значения,
что потери в нём будут равны магнитным
потерям в сердечнике статора на одну
фазу, т.е.
(активное сопротивление такого значения,
что потери в нём будут равны магнитным
потерям в сердечнике статора на одну
фазу, т.е.
![]() )
)
Т-образная схема замещения полностью
отражает физические процессы, происходящие
в асинхронной машине (АМ), но она имеет
узловую точку между сопротивлениями
![]() и
и
![]() ,
что усложняет расчёт токов при различных
значениях скольжения. Поэтому на практике
чаще применяют другую – Г-образную СЗ.
,
что усложняет расчёт токов при различных
значениях скольжения. Поэтому на практике
чаще применяют другую – Г-образную СЗ.
Рассмотрим операцию приведения
вращающегося ротора к эквивалентному
неподвижному. Вращающийся
ротор приходится
заменять эквивалентным неподвижным по
следующей причине: имеется возможность
применить СЗ (и, кроме того, изобразить
векторную диаграмму) только, если частоты
токов и напряжений первичной и вторичной
обмоток будут равны. В противном случае
такой возможности нет. Вращающийся
ротор приходится заменять эквивалентным
неподвижным,
чтобы при
частота тока в обмотке ротора равнялась
частоте тока в обмотке статора
![]() .
.
Приходится вводить следующие поправки:
Значение ЭДС
![]() ,
индуцируемой магнитным потоком
,
индуцируемой магнитным потоком
![]() в фазе вторичной обмотки при неподвижном
роторе, заменяется на ЭДС
в фазе вторичной обмотки при неподвижном
роторе, заменяется на ЭДС
![]() при том же потоке, но при любом скольжении.
При этом
при том же потоке, но при любом скольжении.
При этом
![]() .
Аналогичным образом индуктивное
сопротивление рассеяния
.
Аналогичным образом индуктивное
сопротивление рассеяния
![]() заменяется на
заменяется на
![]() - значение этого сопротивления при любом
скольжении. Получается, что
- значение этого сопротивления при любом
скольжении. Получается, что
![]() .
В итоге получаем эквивалентное
сопротивление вторичной цепи
.
В итоге получаем эквивалентное
сопротивление вторичной цепи
![]() .
В схеме замещения сопротивление
.
В схеме замещения сопротивление
![]() делят на два сопротивления:
делят на два сопротивления:
![]() и
и
![]() .
.
Рассмотрим операцию приведения обмотки ротора к обмотке статора. Представить это можно так: реальная вторичная обмотка заменяется приведённой, которая устроена так же, как и первичная обмотка, и имеет с нею одинаковые числа фаз и витков в фазе, а так же одинаковый обмоточный коэффициент первой гармоники. Вводятся следующие коэффициенты:
Коэффициент трансформации (приведения)
ЭДС и напряжений
![]() ,
где
,
где
![]() - коэффициент скоса пазов.
- коэффициент скоса пазов.
Коэффициент трансформации (приведения)
токов
![]() .
Для короткозамкнутой обмотки в виде
беличьей клетки
.
Для короткозамкнутой обмотки в виде
беличьей клетки
![]() ,
,
![]() ,
,
![]() ,
,
![]() - ток стержня.
- ток стержня.
Коэффициент трансформации (приведения)
сопротивлений
![]()
На рисунке 5 изображена СЗ для режима
холостого хода. Ротор вращается со
скольжением практически равным нулю
(![]() )
и ЭДС в обмотке ротора, которая
пропорциональна скольжению (
)
и ЭДС в обмотке ротора, которая
пропорциональна скольжению (![]() ),
не наводится. Соответственно и ток в
обмотке ротора
),
не наводится. Соответственно и ток в
обмотке ротора
![]() ,
поэтому ветвь вторичной обмотки можно
убрать из схемы замещения.
,
поэтому ветвь вторичной обмотки можно
убрать из схемы замещения.
Рисунок 5.
На рисунке 6 изображена СЗ для режима
короткого замыкания. В этом режиме ротор
удерживается в неподвижном состоянии
(![]() ,
)
и не совершает полезной механической
работы (
,
)
и не совершает полезной механической
работы (![]() ).
В тоже время сопротивление, соответствующее
механической мощности,
).
В тоже время сопротивление, соответствующее
механической мощности,
![]() .
Таким образом сопротивление схемы
замещения определяется сопротивлением
.
Таким образом сопротивление схемы
замещения определяется сопротивлением
![]() и параллельно включенными
и параллельно включенными
![]() и
и
![]() .
Учитывая, что
.
Учитывая, что
![]() ,
можно пренебречь ветвью с
,
можно пренебречь ветвью с
![]() ,
и схема примет указанный выше вид.
,
и схема примет указанный выше вид.
Рисунок 6.
- Раздел 5 -
Рассмотрим рабочие характеристики АД. К рабочим характеристикам относятся зависимости активной потребляемой мощности, полного тока обмотки статора, коэффициента мощности, КПД и скольжения от полезной механической мощности (см. рисунок 7).
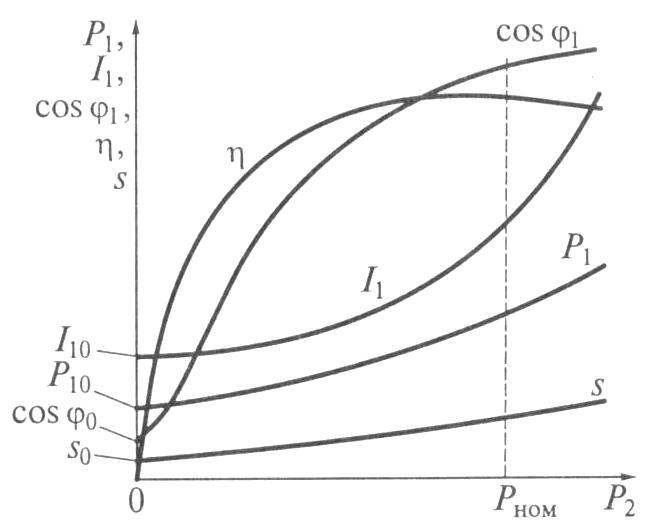
Рисунок 7.
Начнём с самого простого – со скольжения.
Увеличение полезной мощности означает
увеличение момента сопротивления, а
это означает движение вправо по
механической характеристике – увеличение
скольжения и электромагнитного момента.
Электромагнитный момент, как известно,
прямо пропорционален электромагнитной
мощности
,
которая является одной из составляющих
потребляемой активной мощности (![]() ).
Вместе с потребляемой мощностью растёт
и значение тока в обмотке статора. Стоит
отметить, что при большей мощности
).
Вместе с потребляемой мощностью растёт
и значение тока в обмотке статора. Стоит
отметить, что при большей мощности
![]() рост
рост
![]()
![]() и
и
![]() проявляется сильнее. КПД в свою очередь
сначала растёт активно из-за того, что
при режимах, близких к холостому ходу
темпы прироста полезной мощности
опережают темпы роста потерь. Потом
ситуация меняется, растут электрические
потери в роторе (из-за увеличения
проявляется сильнее. КПД в свою очередь
сначала растёт активно из-за того, что
при режимах, близких к холостому ходу
темпы прироста полезной мощности
опережают темпы роста потерь. Потом
ситуация меняется, растут электрические
потери в роторе (из-за увеличения
![]() ),
и КПД после достижения своего максимума
(примерно при нагрузке 80÷85% от номинальной)
начинает падать. Теперь объясним
зависимость
),
и КПД после достижения своего максимума
(примерно при нагрузке 80÷85% от номинальной)
начинает падать. Теперь объясним
зависимость
![]() .
.
Когда мощность
на роторе равна нулю, это не значит, что
мощность
![]() на статоре равна нулю. Она отлична от
нуля и тратится на преодоление магнитных
и электрических потерь в статоре. Это
означает, что ток в обмотке статора не
равен нулю, и
на статоре равна нулю. Она отлична от
нуля и тратится на преодоление магнитных
и электрических потерь в статоре. Это
означает, что ток в обмотке статора не
равен нулю, и
![]() .
При увеличении мощности
происходит увеличение активной
составляющей тока, и
быстро растёт.
.
При увеличении мощности
происходит увеличение активной
составляющей тока, и
быстро растёт.