Теоретические основы начертательной геометрии
Позиционные задачи
Геометрически закономерное изображение пространственного объекта на плоскости достигается при помощи метода проецирования, который является основным методом в начертательной геометрии и инженерной графике [1].
Позиционными называют задачи, связанные с решением на комплексном чертеже вопросов взаимного расположения геометрических объектов. Наибольший практический интерес здесь представляют две группы задач: задачи на взаимную принадлежность и задачи на взаимное пересечение.
Точка принадлежит плоскости, если она принадлежит линии плоскости; прямая линия принадлежит плоскости, если две ее точки принадлежат плоскости.
Точка принадлежит поверхности, если она принадлежит конкретной линии поверхности.
Поверхности вращения
Поверхности вращения нашли самое широкое применение в технике. Они ограничивают поверхности большинства машиностроительных деталей.
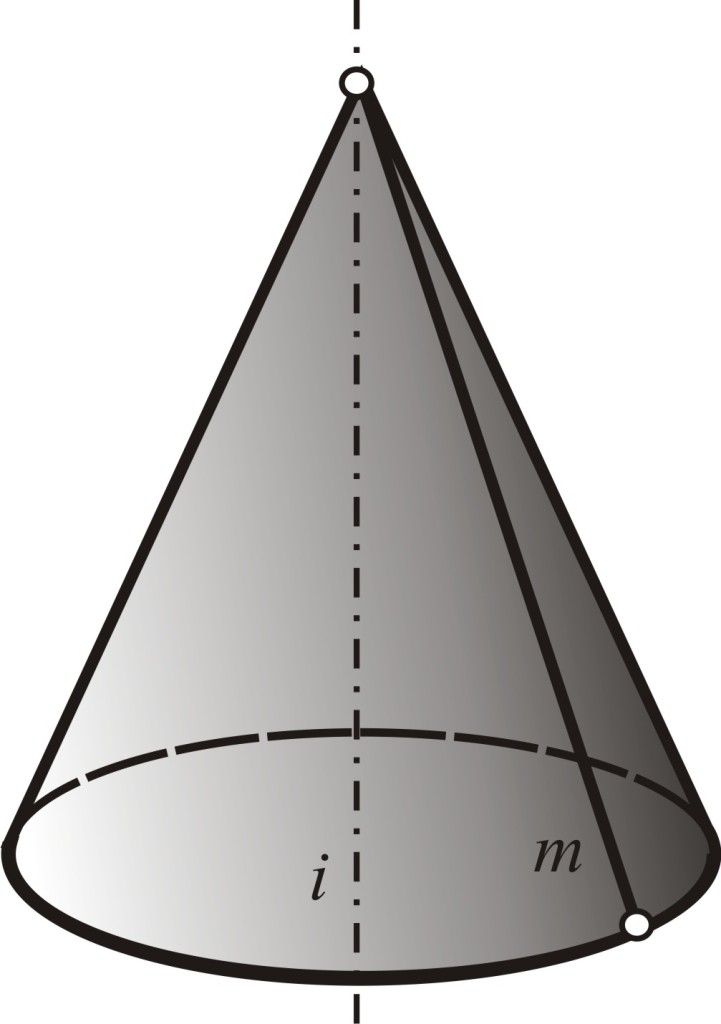
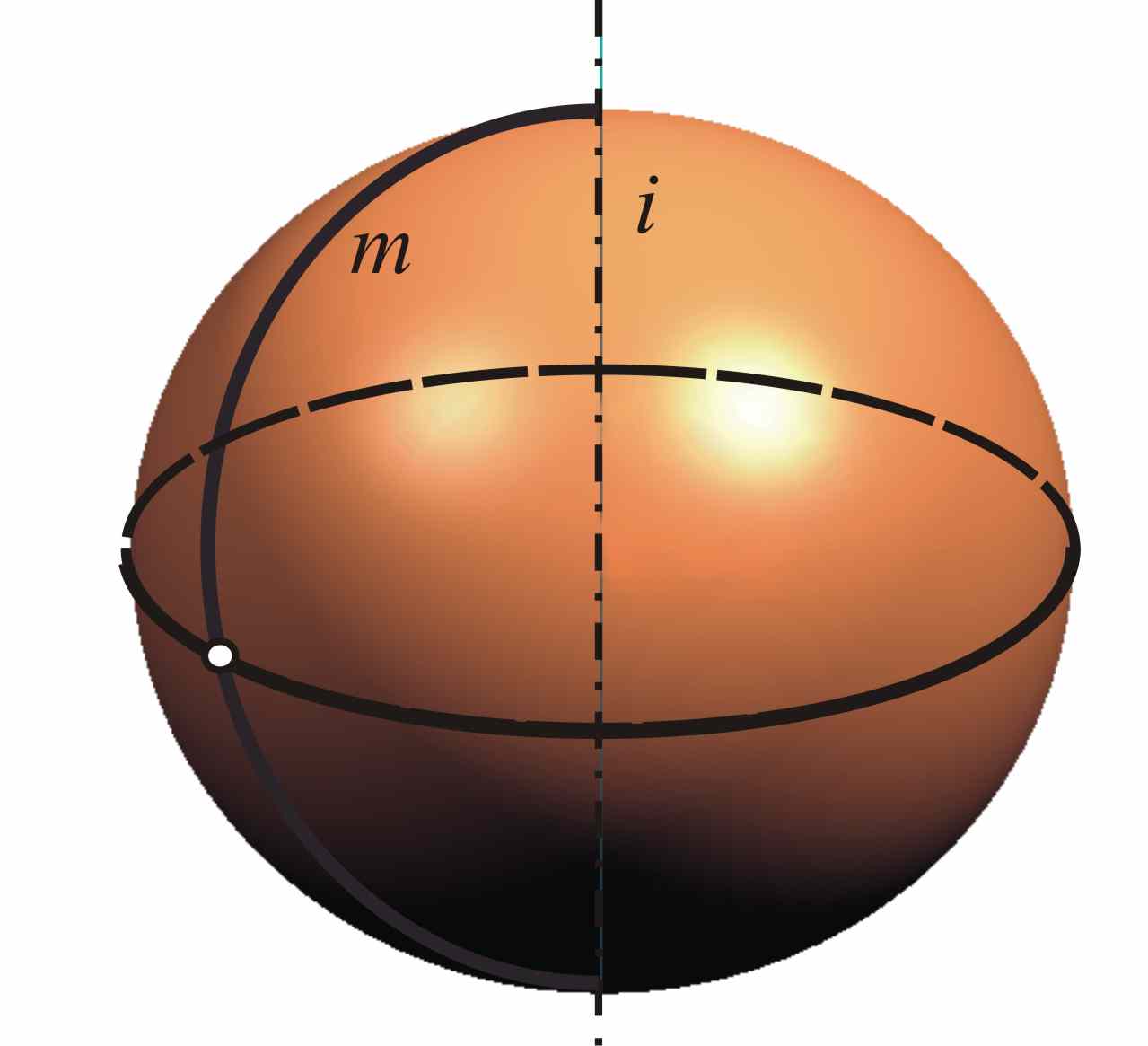
«Зеленую улицу» для их внедрения обеспечила простота формирования. Эти поверхности образуются вращением криволинейной или прямолинейной образующей m вокруг неподвижной прямой оси i
(рис.1). На чертеже ось поверхности вращения обычно располагают перпендикулярно одной плоскости проекций.
Геометрическая часть определителя поверхности вращения
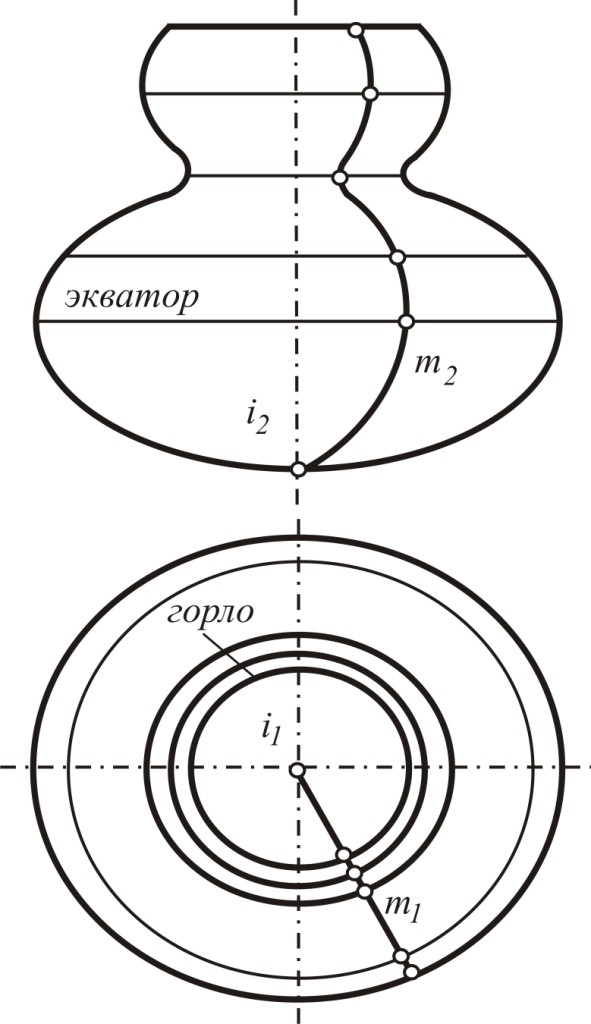
состоит из этих двух линий: образующей m и оси i. Каждая точка образующей при вращении описывает окружность (параллель), плоскость
которой перпендикулярна оси вращения. Так создается каркас поверхности, состоящий из множества окружностей. Наименьшую параллель называют горлом, наибольшую - экватором.
|
|
Рис.2. Конус вращения |
|
|
|
Рис.1. Поверхность вращения |
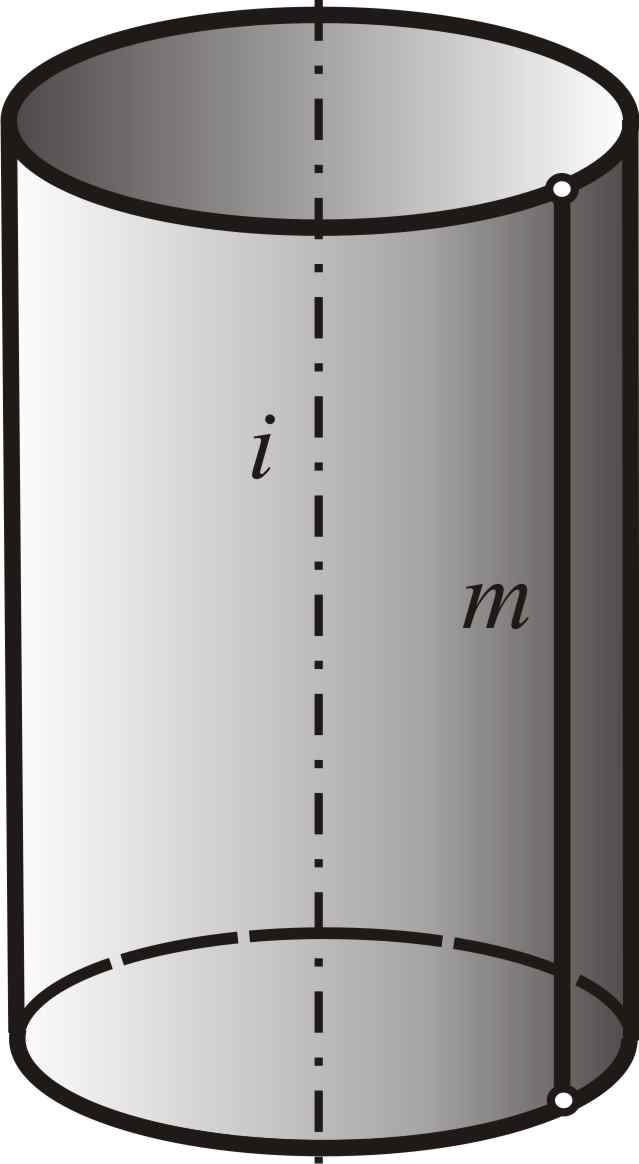
Рис.3. Цилиндр вращения |
Кривые на поверхности вращения, образующиеся в результате пересечения поверхности плоскостями, проходящими через ось вращения,
называются меридианами. Все меридианы одной поверхности конгруэнтны. Фронтальный меридиан называют главным меридианом, он
определяет фронтальный очерк поверхности вращения.
|
Рис.4. Сфера |
|
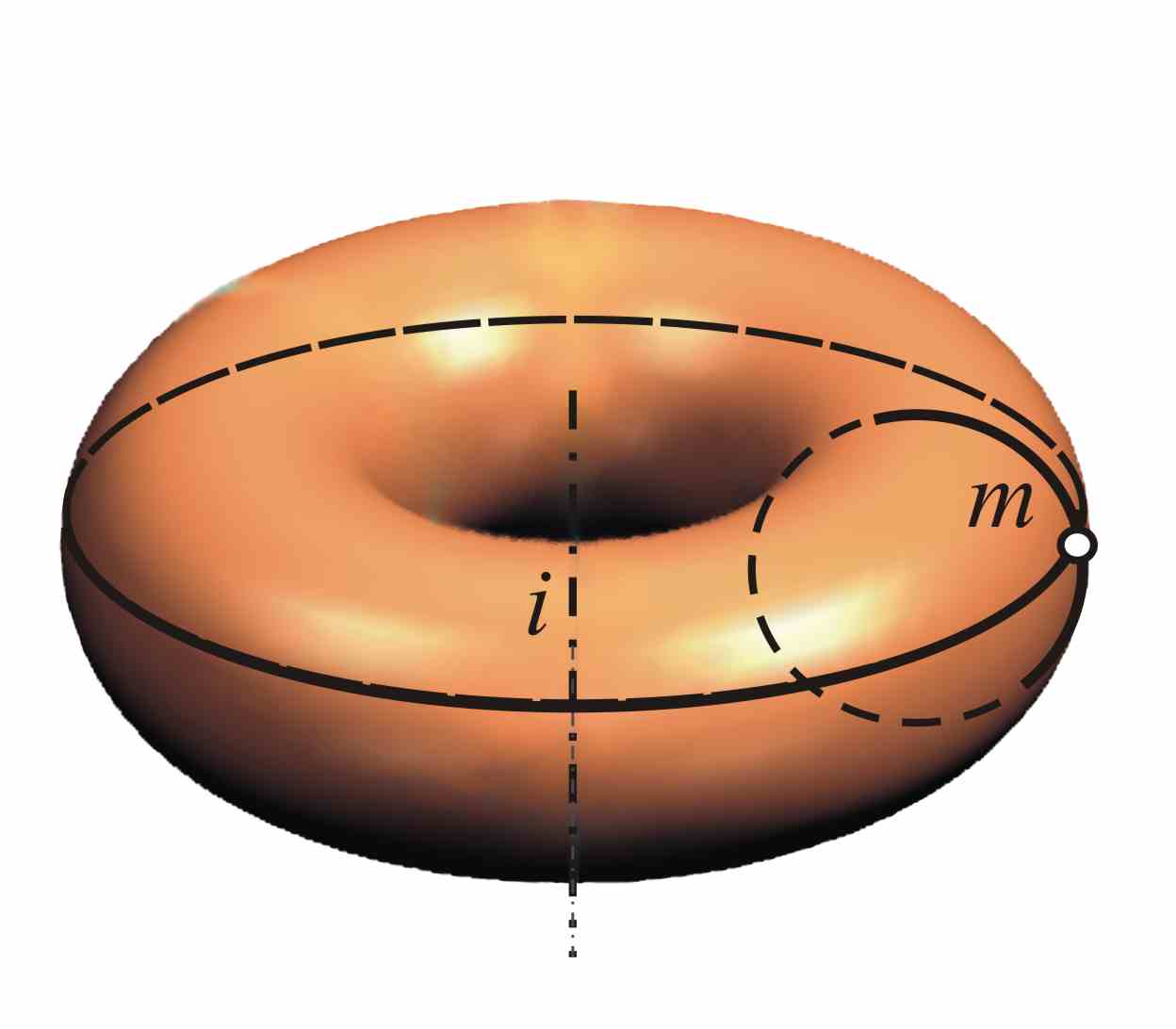
Рис.5. Тор |
|
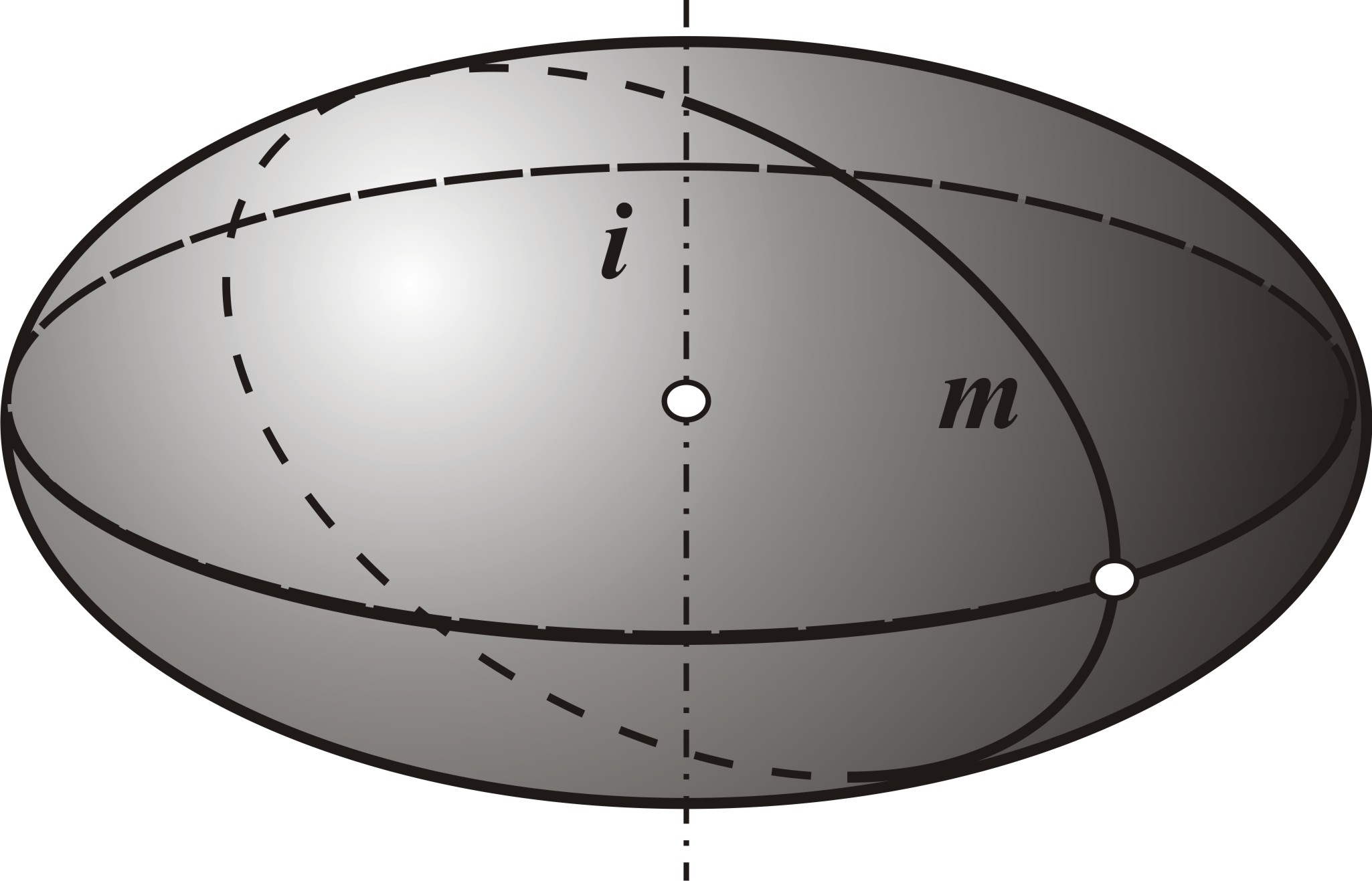
Рис.6. Эллипсоид вращения |
Цилиндрическая поверхность вращения образуется вращением прямой m вокруг параллельной ей оси i (рис.3). Эту поверхность называют еще цилиндром вращения или прямым круговым цилиндром.
Сфера образуется вращением окружности m вокруг прямой i (рис.4).
Тор образуется вращением окружности или ее дуги вокруг оси, лежащей в плоскости окружности. Если ось расположена в пределах образующей окружности, то такой тор называется закрытым. Если ось вращения находится вне окружности, то такой тор называется открытым (рис.5). Открытый тор называют еще кольцом.
Поверхности вращения могут быть образованы и другими кривыми второго порядка.
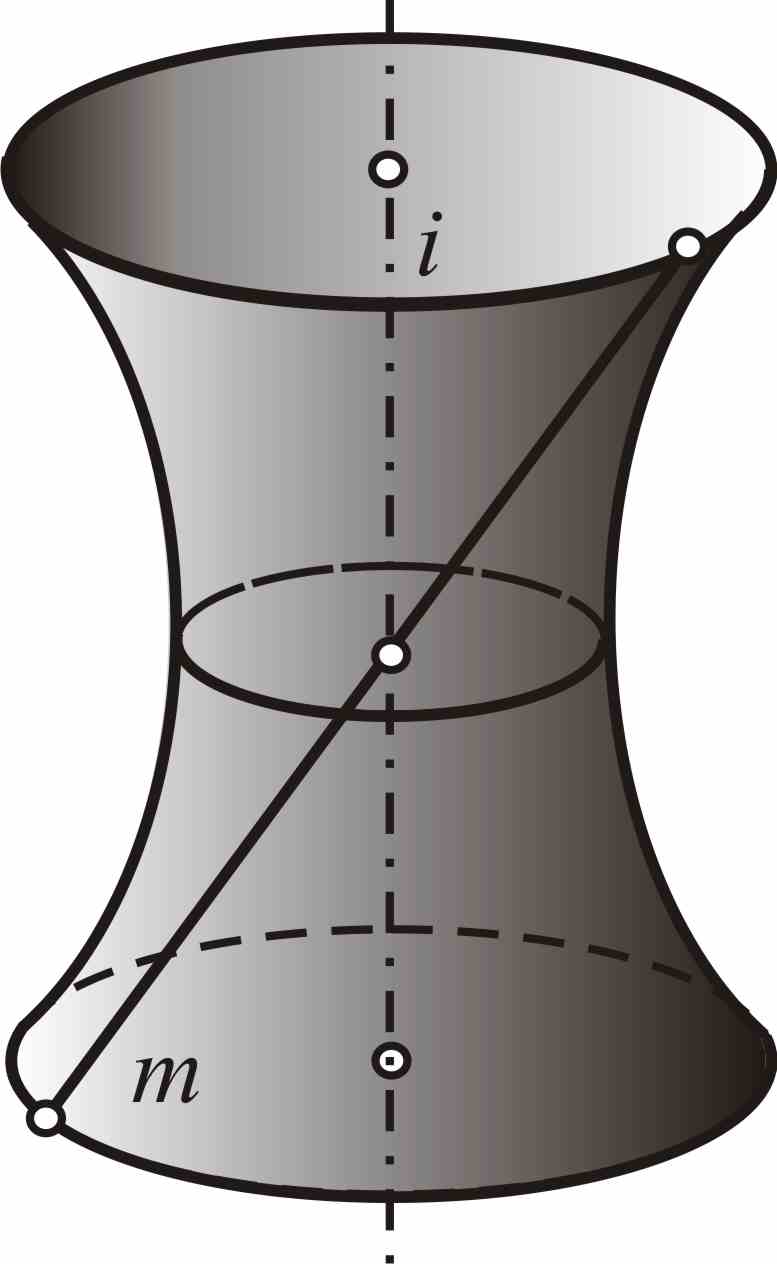
Эллипсоид вращения (рис.6) образуется вращением эллипса вокруг одной из его осей; параболоид вращения (рис.7) - вращением параболы вокруг ее оси; гиперболоид вращения однополостный (рис.8) образуется вращением гиперболы вокруг мнимой оси, а двуполостный - вращением гиперболы вокруг действительной оси.
|
|
Рис.7. Параболоид вращения |
Рис.8. Гиперболоид вращения |

Линейчатые поверхности
Линейчатой называют поверхность, которая образуется движением прямой линии (образующей) в пространстве по определённому закону [1].
Линейчатые поверхности с одной направляющей.
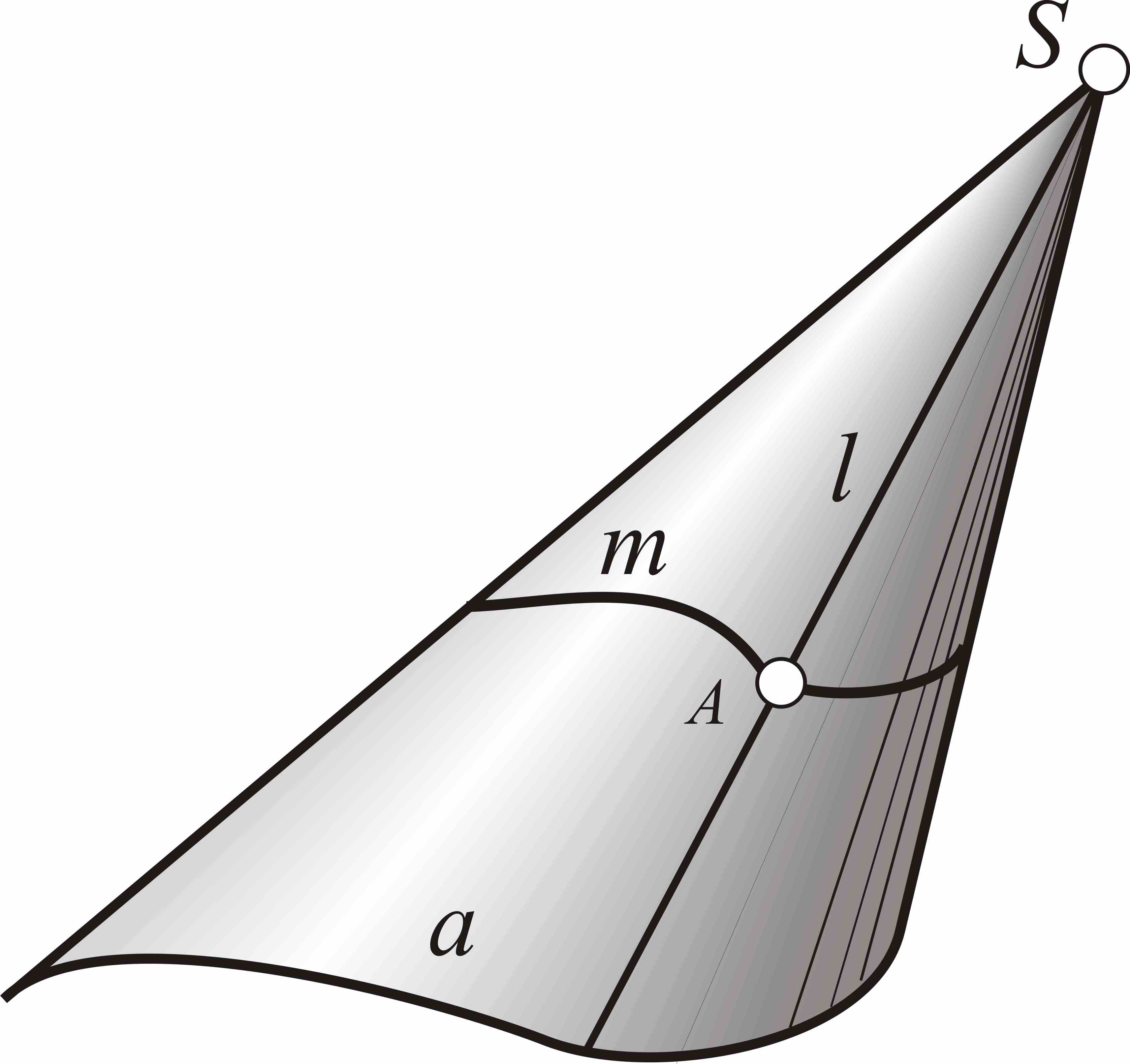
Коническая поверхность образуется перемещением прямолинейной образующей l по криволинейной направляющей a. При этом одна точка образующей всегда неподвижна и является вершиной конической поверхности (рис.9). Определитель конической поверхности включает вершину S и направляющую a.
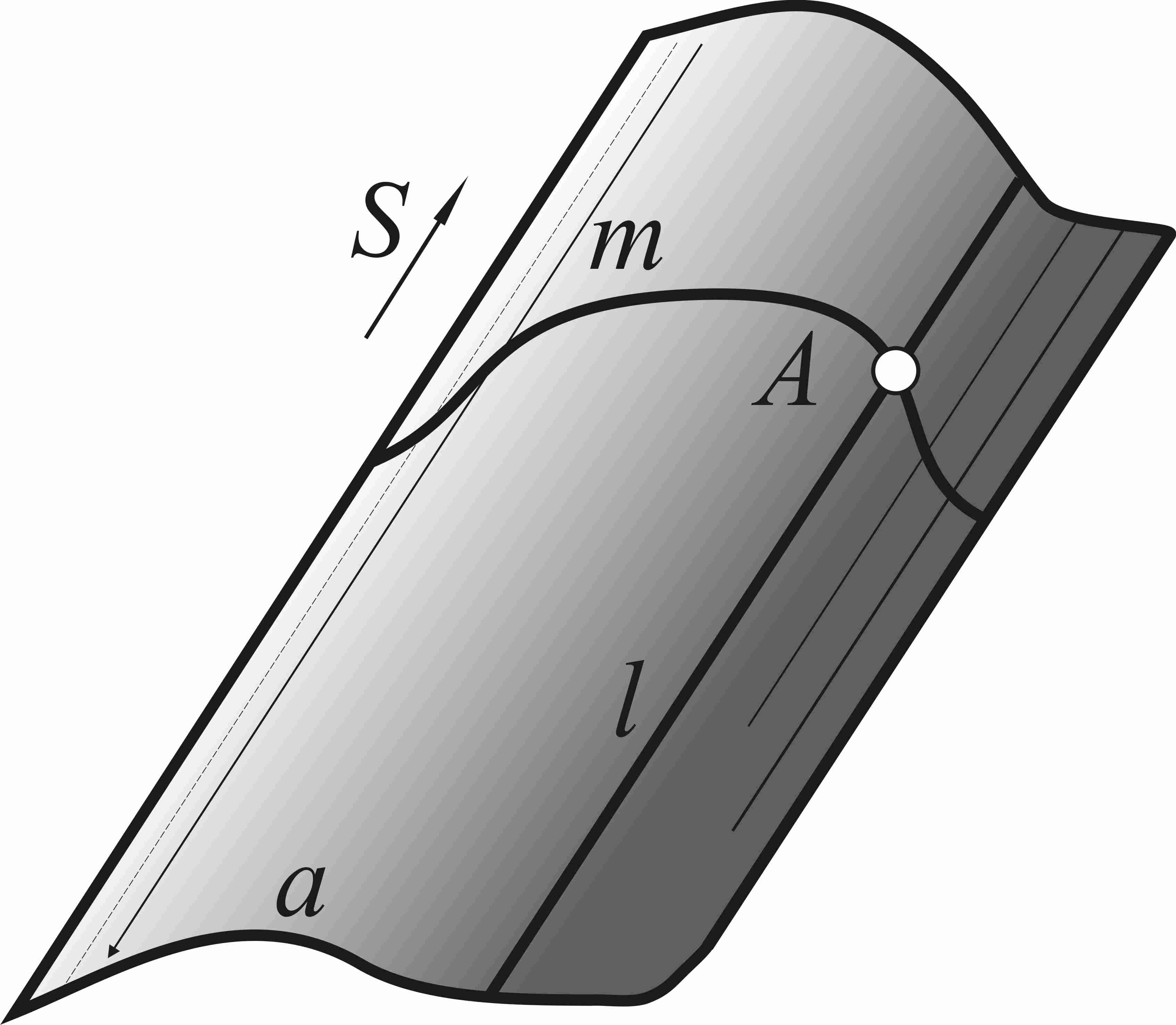
Цилиндрическая поверхность образуется перемещением прямой l, пересекающей кривую направляющую a и параллельно заданному направлению S (рис.10). Цилиндрическую поверхность можно рассматривать как частный случай конической поверхности с бесконечно удаленной вершиной.
Определитель цилиндрической поверхности состоит из направляющей a и направления S.
Т
Рис.9. Коническая
поверхность
Рис.10. Цилиндрическая
поверхность
Рис.11. Торс

Линейчатые поверхности с плоскостью параллелизма
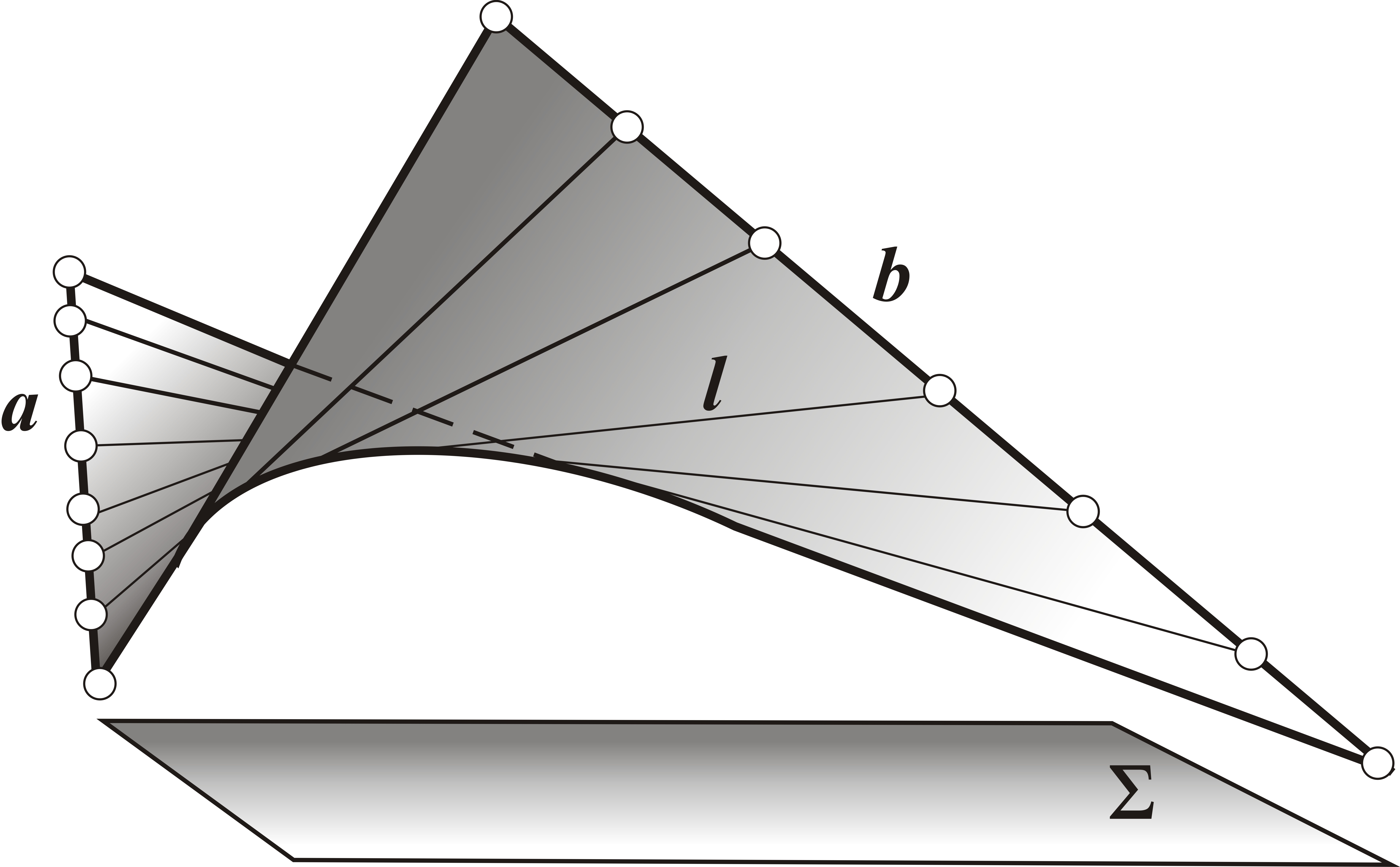
Поверхности с плоскостью параллелизма представляют собой множество прямых (образующих), параллельных некоторой плоскости (плоскости параллелизма) и пересекающих две данные линии - направляющие.
Если направляющими являются две кривые линии, то поверхность называется цилиндроидом. Если одна из направляющих — прямая линия, а вторая — кривая, то поверхность называется коноидом и, наконец, если обе направляющие — прямые линии, то поверхность называют гиперболическим параболоидом или косой плоскостью.
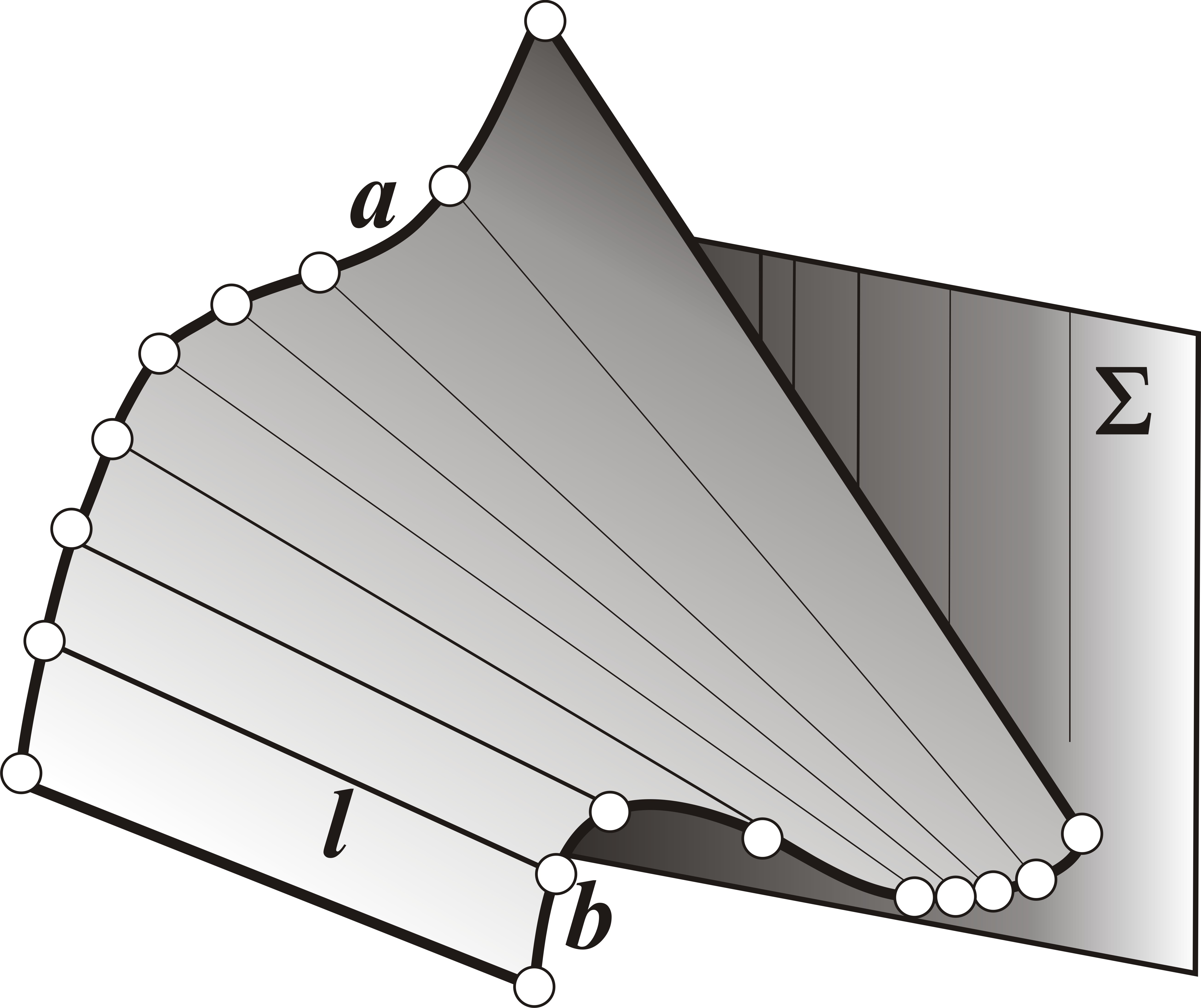
Поверхность цилиндроида определяется плоскостью параллелизма Σ (рис.12) и двумя криволинейными направляющими a и b, которые могут быть пространственными кривыми или плоскими. В последнем случае
Рис.12. Цилиндроид
Рис.13. Коноид
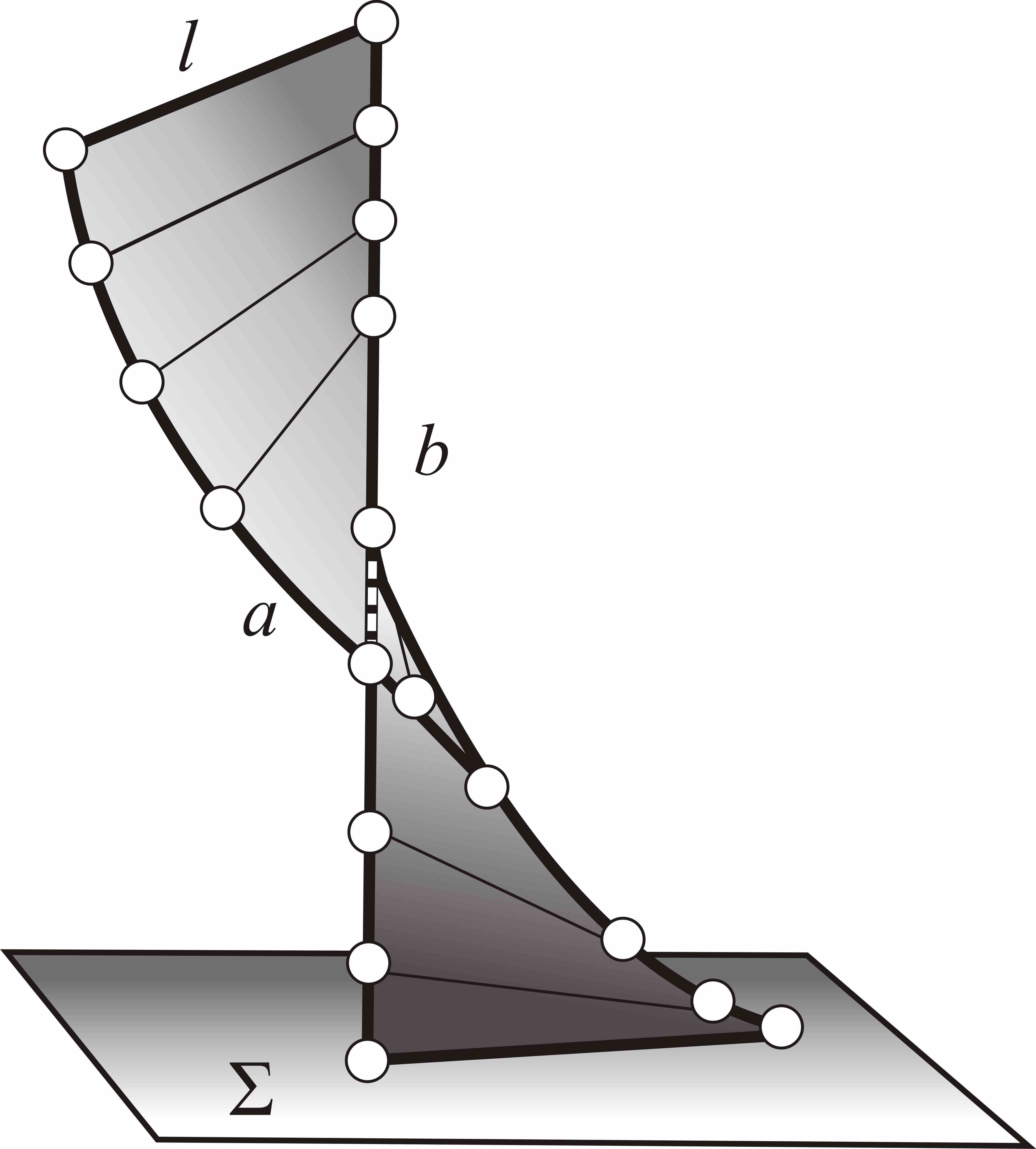
Коноид и гиперболический параболоид отличаются от цилиндроида лишь видом направляющих, которые входят в набор постоянных элементов геометрических частей определителей рассматриваемых поверхностей. У коноида – прямая и кривая (рис.13), а у косой плоскости две прямые (рис.14).
Рис.14. Косая
плоскость