

ДетМаш метода Общий расчет привода Чихачева, Рябов 1998
.pdf21
nэл.дв. = nисп.звена × uпередат.мех-ма
Для механизмов линейного перемещения определяют предварительно частоту вращения вала конечного вращающегося звена, например, шестерни
реечной передачи n1 = Vрейки , где Vрейки , [м/с]- скорость рейки,
pd1
где d1 = mz1 - |
делительный диаметр шестерни назначается как |
для |
|||||
открытых реечных передач при m ³3....4 и z1 ³19. |
|
|
|
||||
Обычно |
d1 = mz1 ³60....80 мм. |
|
|
|
|
|
|
Для передачи винт-гайка качения (рис.19) при поступательно |
|||||||
движущейся гайке |
nвинта = |
Vгайки |
, |
|
|
|
|
|
|
|
|
||||
|
|
|
noP |
|
|
|
|
где |
no - число заходов резьбы, |
P - шаг резьбы в мм. |
|
|
|
||
При этом диаметр резьбы, шаг и диаметр шариков предварительно |
|||||||
выбирают по нормали станкостроения так, чтобы dвинта > ( |
S |
+ 0,5d |
ш ), |
||||
|
|||||||
|
|
|
|
|
30 |
|
|
где S - рабочий ход винта. Дальнейший расчет привода, включая разбивку передаточного отношения по ступеням производится обычными методами.
6. ОПРЕДЕЛЕНИЕ МОЩНОСТИ, ЧАСТОТЫ ВРАЩЕНИЯ И ВРАЩАЮЩЕГО МОМЕНТА НА ВСЕХ ВАЛАХ ПРИВОДА
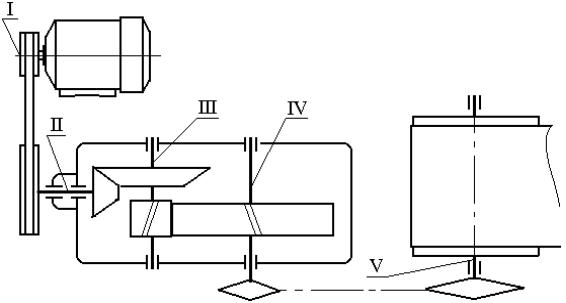 Рис.20 Для удобства дальнейших расчетов, последовательно пронумеруем валы
Рис.20 Для удобства дальнейших расчетов, последовательно пронумеруем валы
начиная с вала электродвигателя. Для первого вала определяем:

|
|
|
|
|
|
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|
||
|
МОЩНОСТЬ - может быть принята равной, |
|
|
РI = |
Ft V |
|
|||||||||||||||
определенной ранее, потребной мощности электродвигателя, |
|
|
|
||||||||||||||||||
|
|
hобщ |
|||||||||||||||||||
которая |
обычно |
меньше мощности электродвигателя |
по |
|
|
|
|
||||||||||||||
каталогу. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если в качестве расчетной принимается каталожная мощность |
||||||||||||||||||||
электродвигателя, |
то |
|
|
|
РI = Рэл.дв. , [кВт]. |
|
|
|
|
|
|
|
|||||||||
|
ЧАСТОТА |
ВРАЩЕНИЯ - равна асинхронной частоте вращения вала |
|||||||||||||||||||
электродвигателя |
nI = nэл.дв., [мин-1]. |
|
|
|
|
|
|
|
|
||||||||||||
|
ВРАЩАЮЩИЙ МОМЕНТ - определяется по формуле |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
ТI |
= 9550 |
PI |
, |
[ Н × м ] |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
nI |
|
|
|
|
|
|
|
|
|
|
Далее для всех валов определяем: |
|
|
|
|
|
|
|
|
||||||||||||
P = P |
1 |
× h |
, [кВт]; |
n |
i |
= |
ni-1 |
, [мин-1] ; |
T = T |
× u |
j |
× h |
, [ Н × м ], |
||||||||
|
|||||||||||||||||||||
i |
i- |
j |
|
|
|
|
|
uj |
i |
i-1 |
|
j |
|
|
|
||||||
|
i - номер вала, j |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где |
- номер передачи кинематической схемы привода. Для |
||||||||||||||||||||
приводного вала транспортера отличие полученной частоты вращения от заданной не должно превышать 5%. Для дальнейшего конструирования редуктора определяем минимальный диаметр валов на участке, передающем
вращающий момент d |
|
= c × 3 |
|
|
, мм. Значения коэффициента С: |
|
i |
|
T |
||||
|
|
|
i |
|
||
для быстроходных валов С=7,1....6,5; |
для промежуточного вала С=6,5....5,8; |
|||||
для тихоходных валов |
С= |
5,8....4,6. |
Если быстроходный вал редуктора |
|||
соединяется с валом электродвигателя через муфту, то его диаметр
определяется как |
dI = (0,8....1)dэл.дв. |
|
|
|
|
|
|
|
|||||||||
Результаты вычислений заносим в таблицу 5: |
|
|
|
Таблица 5. |
. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
тип и № j передачи |
клино- |
|
кониче- |
цилиндри- |
|
цепная |
|
|
|||||||||
между валами |
|
ременная |
|
ская |
|
ческая |
|
|
|
|
|
||||||
|
|
|
|
зубчатая |
|
зубчатая |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ вала i |
|
|
I |
|
II |
|
III |
|
IV |
|
V |
|
|||||
Pi |
кВт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ni |
мин-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ti |
Н м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
минимальный |
|
dэл.дв. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
диаметр вала |
|
|
(с=7) |
|
(с=6) |
|
(с=5) |
|
(с=4,6) |
|
|||||||

23
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1.Промышленные роботы в машиностроении. Альбом схем и чертежей под ред. Соломенцева Ю.М. М, Машиностроение 1987.
2.Козырев Ю.Г. Промышленные роботы. Справочник, М., Машиностроение, 1987г.
3.Пронин Б.А., Ревков Г.А. Бесступенчатые клиноременные и фрикционные передачи, М., Машиностроение, 1980 г.
4.Методические указания № 1031 Приводы промышленных роботов.
МАМИ, 1988 г.
Ольга Анатольевна Чихачева, Владимир Анатольевич Рябов,
ОБЩИЙ РАСЧЕТ ПРИВОДА.
Методические указания к курсовому проектированию для студентов всех машиностроительных специальностей.
Лицензия ЛР № 021209 |
от 17 апреля 1997 г. |
|
|
Подписано в печать |
|
Заказ |
Тираж |
Усл.п.л. 1,0 Уч.-изд.л. 1,5 |
|
|
|
Бумага типографская |
Формат 60х90/16 |
|
|
МГТУ «МАМИ», 105839, Москва, Б.Семеновская ул., 38