

Кафедра ДМ 09 04 2013 / Артоболевский И.И. Механизмы в современной технике, в 7 томах, 1979-1981 гг / Артоболевский 5
.pdf3068 |
КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ |
КР |
ПОДАЧИ С ОСТАНОВКАМИ |
|
|
|
ВЫХОДНОГО БАРАБАНА |
СП |
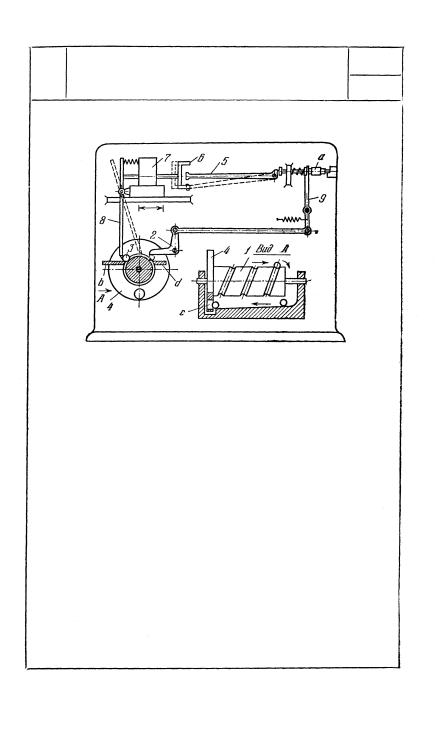
Кулачок 1, вращающийся вокруг неподвижной оси A, имеет паз а, в котором перекатывается ролик 13 коромысла 2, вращающегося вокруг неподвижной оси В. В том же пазу перекатывается ролик 14 коромысла 9, вращающегося вокруг неподвижной оси D. Выходной барабан 10 свободно вращается вокруг неподвижной оси D. Колодка 12 свободно вращается вокруг оси K звена 8, которое входит во вращательные пары С и F с коромыслом 9 и звеном 7. Звено 7 входит во вращательную пару Е с коромыслом 6, вращающимся вокруг неподвижной оси N и имеющим ролик 15, перекатывающийся в пазу b ползуна 4, скользящего по неподвижной направляющей f. Колодка 11 свободно вращается вокруг оси L коромысла 5, вращающегося вокруг неподвижной оси М и имеющего ролик 16, перекатывающийся в пазу b ползуна 4. Привод в движение ползуна 4 осуществляется шатуном 3, входящим во вращательные пары С и Р с коромыслом 2 и ползуном 4. При вращении кулачка 1 барабан 10 вращается с остановками. Вращение барабана 10, соответствующее процессу подачи материала, осуществляется колодкой 12 в те периоды времени, когда она прижата к поверхности барабана 10, а колодка 11 отжата от его поверхности. Остановка барабана 10 осуществляется колодкой 11 в те периоды времени, когда она прижата к поверхности барабана 10, а колодка 12 отжата от
его поверхности.
171

КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ 3069 ПОДАЧИ С ОСТАНОВКАМИ
ВЫХОДНОГО БАРАБАНА
Кулачок 1, вращающийся вокруг неподвижной оси А, имеет два паза а и b, в которых перекатываются: в пазу а — ролики 12 и 13, а в пазу b — ролик 14. Ролики 12, 13 и 14 принадлежат .коромыслам 2, 3 и 4, вращающимся вокруг неподвижных осей В, С и D. Колодка 10 свободно вращается вокруг оси Т коромысла 2. Звено 7 входит во вращательные пары К и L со звеном 8 и коромыслом 4. Звено 8 вращается вокруг неподвижной оси Е, входя во вращательную пару N со звеном 6. Колодка 11 свободно вращается вокруг оси М звена 6. Звено 5 входит во вращательные пары С и F со звеном 6 и коромыслом 3. Выходной барабан 9 свободно вращается вокруг оси Е. При вращении кулачка 1 барабан 9 вращается с остановками. Вращение барабана 9, соответствующее процессу подачи материала, осуществляется колодкой 11 в те периоды времени, когда она прижата к поверхности барабана 9, а колодка 10 отжата от его поверхности. Остановка барабана 9 осуществляется колодкой 10 в те периоды времени, когда она прижата к поверхности барабана 9, а колодка 11 отжата от его
поверхности.
КР
СП
172
3070 |
КУЛАЧКОВО-РЫЧАЖНЫЙ |
КР |
ПРОСТРАНСТВЕННЫЙ |
|
|
|
СОРТИРУЮЩИЙ МЕХАНИЗМ |
СП |
Синхронно с транспортирующей системой, перемещающей изделие от одной измерительной позиции к другой, вращается кулачок 1 с винтовыми канавками. По каждой канавке, опираясь на полку b, движется шарик 3, причем каждый шарик 3 сопровождает свое изделие а, передвигаемое транспортирующей системой и переходящее от одной измерительной позиции к Другой. Если изделие а — годное, то оно проносится транспортирующей системой до конца и сбрасывается в приемник. Одновременно сопровождающий его шарик 3, пройдя все витки винтовой резьбы, доходит до конца кулачка 1, падает вниз, скатывается в обратную сторону, попадая в отверстие диска 4, вращающегося вместе с кулачком 1, поднимается и вновь попадает в винтовую канавку кулачка 1, начиная цикл движения сначала. Если на какой-либо измерительной позиции изделие будет забраковано, то рычаг 5 отклонится от среднего положения и упор 6, совершающий вместе с ползуном 7 возвратно-поступательное движение, наткнется на рычаг 5, благодаря чему рычаг 8 отклонится и перекинет шарик 3 на другую сторону винтовой канавки (положение показано на чертеже пунктиром). Тогда шарик 3 будет сопровождать забракованное изделие а, скользя вдоль полки d. Дойдя до конца винтовой канавки, шарик 3 приподнимет конец рычага 2, последний через систему промежуточных звеньев отклонит рычаг 9, и изделие а, потеряв опору, провалится в ящик
бракованных изделий.
173
|
КУЛАЧКОВО-РЫЧАЖНЫЙ |
КР |
3971 |
ПРОСТРАНСТВЕННЫЙ СОРТИРУЮЩИЙ |
|
|
МЕХАНИЗМ С НЕПОДВИЖНЫМ КУЛАЧКОМ |
СП |
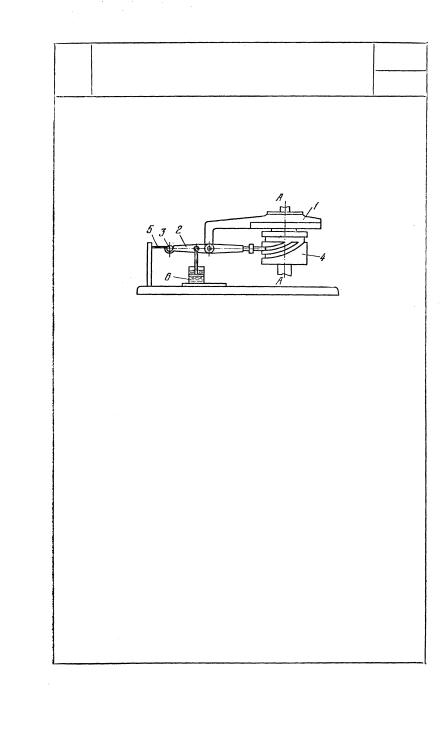
К непрерывно вращающейся вокруг неподвижной оси A — А карусели 1 подвешены коромысла 2, в чашки которых из загрузочного автомата поступают изделия 3. В определенном секторе поворота карусели 1 коромысло 2 освобождается от связи с неподвижным кулачком 4 и совершает качательное движение. В зависимости от веса изделия 3 правый конец коромысла 2 входит в один из трех расположенных друг над другом пазов кулачка 4. В фиксированном таким образом положении коромысло 2 несет изделие к одному из трех сбрасывателей 5, расположенных на различных уровнях и поставленных один за другим. Каждое коромысло снабжено масляным
демпфером 6.
174

10. МЕХАНИЗМЫ ГРУЗОПОДЪЕМНЫХ УСТРОЙСТВ (3072)
3072 |
КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ |
КР |
|
||
ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗА |
|
|
|
Гп |
|
|
|
Кулачок 1, имеющий профилированный паз а, вращается вокруг неподвижной оси A и жестко скреплен с круглым эксцентриком 2, охваченным втулкой b звена 11, входящего во вращательную пару В со звеном 8, вращающимся вокруг неподвижной оси С. Звено 10 входит во вращательные пары D и F со звеньями 8 и 9. Звено 9 вращается вокруг неподвижной оси Н. Платформа 6, входящая во вращательные пары F и K со звеньями 8 и 9, имеет направляющую f, по которой скользит ползун 7, снабженный шипами е. Звено 3 слева имеет прорезь с, которая скользит по неподвижному пальцу 13. Ролик 12 звена 3 перекатывается в пазу а кулачка 1. Звено 3 входит во вращательную пару Т с коромыслом 4, вращающимся вокруг неподвижной оси Р и входящим во вращательную пару R с шатуном 5. Шатун 5 входит во вращательную пару S с ползуном 7. Размеры звеньев механизма удовлетворяют условиям: FK = СН = DE, CF = HK и CD = НЕ. Таким образом, звенья 8, 10, 9 и 10 образуют двойной параллелограмм и, следовательно, платформа 6 совершает круговое поступательное движение. Так как ползун 7 имеет возможность двигаться возвратно-поступательно относительно платформы 6, то груз, положенный на шипы е звена 7, одновременно получает перемещения как в горизонтальном, так и вертикаль-
ном направлениях.
175

11.МЕХАНИЗМЫ ИЗМЕРИТЕЛЬНЫХ
ИИСПЫТАТЕЛЬНЫХ УСТРОЙСТВ (3073—3074)
|
КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ |
КР |
|
3073 |
ПОДАЧИ АВТОМАТА ДЛЯ КОНТРОЛЯ |
||
|
|||
|
ПОРШНЕВЫХ ПАЛЬЦЕВ |
И |
Кулачок 3 вращается вокруг неподвижной оси А. Коромысло 4 вращается вокруг неподвижной оси В и имеет ролик 14, перекатывающийся по профилю кулачка 3. Ролик 9 кулачка 3 перекатывается по планке а, жестко связанной с коромыслом 9 и прижимаемой к ролику пружиной 11. Контролируемая деталь 1 из питателя поступает на штангу 2. При вращении кулачка 3 штанга 2 перемещается по траектории, имеющей вид замкнутого прямоугольника: вверх, влево, вниз и вправо. Движение вверх и вниз осуществляется от кулачка 3 через коромысло 4, тягу 5, угловые рычаги 6, на которых лежит штанга 2, и пружины 7 и 8. Движение вправо и влево осуществляется роликом 9, упирающимся в планку а рычага 10. Рычаг 10 связан со штангой 2
посредством звеньев 12 и 13.
176
КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ 3074 УСТРОЙСТВА ТРЕТЬЯКОВА,
РЕГИСТРИРУЮЩЕГО СИЛУ И НАПРАВЛЕНИЕ ВЕТРА
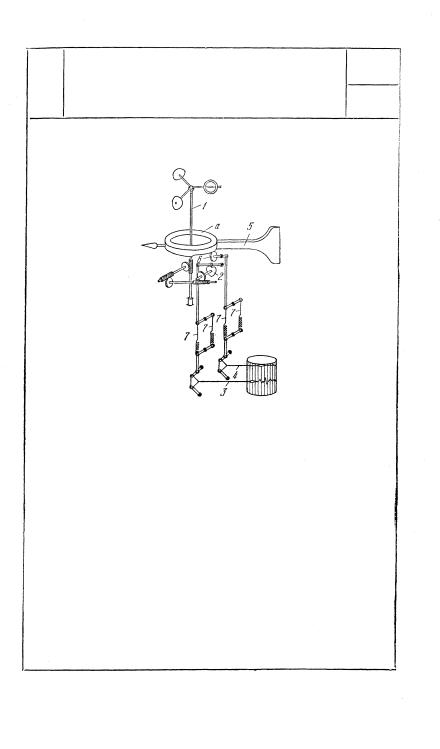
Вал 1 вертушки анемометра при помощи |
||||||
трех червячных передач вращает ку- |
||||||
лачок |
2, |
преобразующий |
вращение |
|||
вала |
1 |
в |
вертикальное |
перемещение |
||
пера |
3 |
регистрирующего |
механизма. |
|||
Аналогично передается перу |
4 |
угло- |
||||
вое перемещение флюгера 5. Для этой |
||||||
цели на флюгере укреплено кольцо а, |
||||||
имеющее |
|
клинообразную |
форму. |
По |
||
его нижней поверхности скользит ро- |
||||||
лик 6, который при повороте кольца а |
||||||
получает вертикальное смещение, пе- |
||||||
редаваемое |
через систему |
рычагов |
||||
перу 4 регистратора. Удлинение или |
||||||
укорочение одной из проволок 7 в ре- |
||||||
зультате изменения окружающей тем- |
||||||
пературы |
|
компенсируется |
|
соответст- |
||
вующими |
изменениями длины другой, |
|||||
в результате чего колебания темпера- |
||||||
туры |
не |
отражаются на |
показаниях |
|||
|
|
|
прибора. |
|
|
|
КР
И
177

12. МЕХАНИЗМЫ МУФТ И СОЕДИНЕНИЙ
(3075—3077)
|
КУЛАЧКОВЫЙ МЕХАНИЗМ |
КР |
|
3075 |
РОЛИКОВОЙ МУФТЫ |
||
|
|||
|
ПЕРИОДИЧЕСКОГО ВЫКЛЮЧЕНИЯ |
МС |
При опускании педали, не показанной на рисунке, плита 1, преодолевая сопротивление пружины 2, перемещается вправо. Планка а, упираясь в звено 3, перемещает его вместе с упором 4 вправо, преодолевая сопротивление пружины 5. Как только упор 4 выйдет из зацепления с выступом d звена 6, последнее под действием пружины 7, закрепленной на диске 8, повернется по часовой стрелке. При этом сегменты b звена 6 переместят ролики 9 муфты свободного хода, заклинивая их между кулачковым диском 10 и ободом 11, запрессованным во вращающемся маховике 12. Так как диск 10 жестко насажен на вал 13, последнему сообщается вращение вместе с диском 8 по часовой стрелке. Выступ с диска 8, соприкасаясь с упором е плиты 1, поворачивает ее относительно оси D. При этом планка а освобождает звено 3 и упор 4 под действием пружины 5 занимает исходное положение, предотвращая звено 6 от дальнейшего поворота. Ролики 9, обкатывая диск 10, расцепляют муфту свободного хода, и вал 13, сделав один оборот, останавливается. При этом пружина 7
растягивается.
178

3076 |
КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ |
КР |
|
|
|||
ФРИКЦИОННОЙ МУФТЫ |
мс |
||
|
|||
|
|
Втулка 5 скользит вдоль оси вала А — A и входит во вращательную пару В с профилированным рычагом З, имеющим выступ d, входящий во впадину b корпуса 1 муфты. Кулачок 3 входит во вращательную пару D с нажимным диском 2. Профилированный рычаг 3, находящийся под действием пружины 4, стремится зажать фрикционный диск а между корпусом муфты и нажимным диском 2. Для выключения муфты достаточно втулку 5 отодви-
нуть вправо.
3077 |
КУЛАЧКОВО-РЫЧАЖНЫЙМЕХАНИЗМ |
КР |
|||||||
|
|||||||||
|
|
ПРЕДЕЛЬНОЙМУФТЫ |
|
||||||
|
|
|
МС |
||||||
|
|
|
|
|
|
|
|
|
|
Крутящий момент от вала 6 |
|
|
|||||||
передается |
обойме |
7 |
посредством |
|
|
||||
кулачка |
|
7, |
сцепляющегося |
с |
|
|
|||
собачкой 2. При повышении угло- |
|
|
|||||||
вой скорости муфты сверх уста- |
|
|
|||||||
новленного значения |
центробеж- |
|
|
||||||
ные силы инерции рычага 4 сжи- |
|
|
|||||||
мают пружину 3 и рычаг 4, под- |
|
|
|||||||
нимаясь, |
освобождает |
собачку |
2. |
|
|
||||
Центробежные силы инерции со- |
|
|
|||||||
бачки 2 |
|
сжимают |
пружину |
5, |
|
|
|||
и муфта |
|
выключается. |
Угловая |
|
|
||||
скорость |
|
обоймы |
7 |
снижается. |
|
|
|||
При снижении |
угловой скорости |
происходит включение муфты |
|||||||
|
|
благодаря |
действию |
пружин 3 и 5. |
|
||||
179

13. МЕХАНИЗМЫ ПОРШНЕВЫХ МАШИН (3078—3080)
|
КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ |
КР |
|
3078 |
ТРЕХЦИЛИНДРОВОЙ |
||
|
|||
|
ПОРШНЕВОЙ МАШИНЫ |
ПМ |
Кулачок 1, имеющий симметричный профилированный паз а, состоящий из шести равных участков, вращается вокруг неподвижной оси А. С кулачком 1 жестко связаны прямолинейные направляющие b, в которых скользят ролики 3 толкателей 4. Толкатели 4 жестко связаны с поршнями 2, которые имеют возвратно-поступательное движение в блоке 5 цилиндров, вращающемся вокруг оси А. Кинематическое замыкание механизма обеспечивается пазовой формой профиля кулачка 1. Оси цилиндров образуют угол в 120°.
180