

Кафедра ДМ 09 04 2013 / Артоболевский И.И. Механизмы в современной технике, в 7 томах, 1979-1981 гг / Артоболевский 3
.pdf
|
РЫЧАЖНО-ЗУБЧАТЫЙ |
РЗ |
1683 |
МЕХАНИЗМ АРТОБОЛЕВСКОГО |
|
ДЛЯ |
ВОСПРОИЗВЕДЕНИЯ ТРИФОЛИУМА |
ВК |
81
|
РЫЧАЖНО-ЗУБЧАТЫЙ |
РЗ |
1684 |
МЕХАНИЗМ АРТОБОЛЕВСКОГО |
|
ДЛЯ ВОСПРОИЗВЕДЕНИЯ |
|
|
|
ВК |
|
|
ВИРТУАЛЬНОЙ ПАРАБОЛЫ |
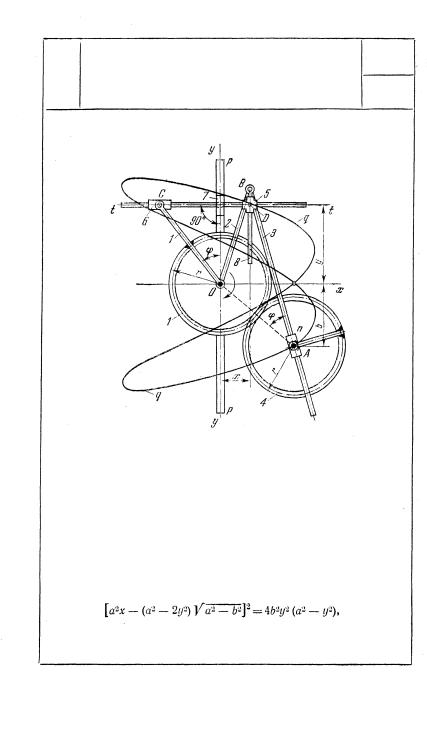
Длины звеньев механизма удовлетворяют условию: OB = ОС= = ОA = а. Радиусы r зубчатых колес 1 и 4 равны. Зубчатое коле-
со 1, вращающееся вокруг неподвижной оси |
О, входит в зацепле- |
ние с зубчатым колесом 4, вращающимся |
вокруг неподвижной |
оси А. Рычаг ОС, жестко связанный с колесом 1, входит во вра-
щательную пару С с ползуном 6, скользящим |
вдоль траверзы |
t — t ползуна 7, который скользит в неподвижной |
направляющей |
р, ось которой совпадает с осью Оу. Звено 2, вращающееся вокруг неподвижной оси О, входит во вращательные пары В со звеном 3 и звеном 8. Звено 8 скользит в крестообразном ползуне 5, оси направляющих которого взаимно, перпендикулярны. Звено 3 входит в поступательную пару с ползуном п, жестко связанным с колесом 4. При вращении колеса 1 вокруг оси О точка D описывает виртуальную параболу q — q, уравнение которой
где b — постоянный параметр механизма.
82

|
РЫЧАЖНО-ЗУБЧАТЫЙ |
РЗ |
1685 |
МЕХАНИЗМ АРТОБОЛЕВСКОГО |
|
ДЛЯ ВОСПРОИЗВЕДЕНИЯ |
|
|
|
ВК |
|
|
ВИРТУАЛЬНОЙ ПАРАБОЛЫ ВИНЧЕНТИО |
83

13. МЕХАНИЗМЫ ПЕРЕКЛЮЧЕНИЯ, ВКЛЮЧЕНИЯ И ВЫКЛЮЧЕНИЯ (1686)
1686 |
РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ |
РЗ |
|
||
ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ |
|
|
|
ПВ |
|
|
|
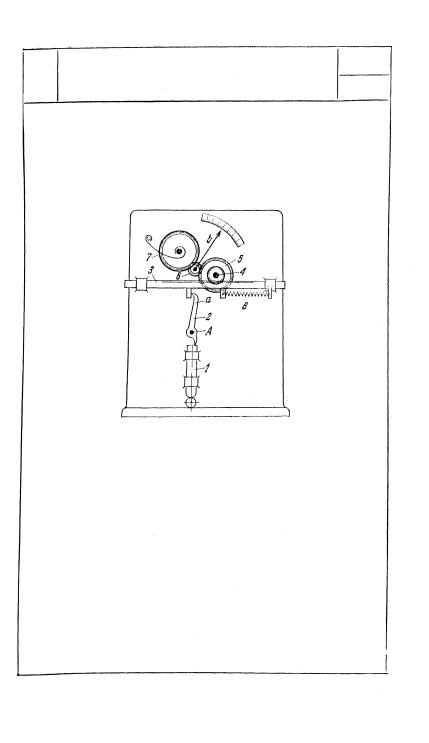
При повороте рукоятки 1 в горизонтальной плоскости поворачиваются кожух 2 и ось 3 и ползуну 4 сообщается перемещение посредством зубчатого колеса 5 и звена 6. Правый конец зве-
на 6 представляет собой |
зубчатое колесо, а ле- |
вый — зубчатый сегмент, |
входящий в зацепление |
с зубчатой рейкой а ползуна 4. При повороте рукоятки 1 в вертикальной плоскости ось 3, перемещаясь в вертикальном направлении, сообщает ползуну 7 перемещение посредством винтового колеса 8 и зубчатого звена 9. Таким образом, поворачивая рукоятку 1, сообщают перемещение или ползуну 4, или ползуну 7, переключающих пе-
редачи в коробке, не показанной на рисунке.
84
14.МЕХАНИЗМЫ ИЗМЕРИТЕЛЬНЫХ
ИИСПЫТАТЕЛЬНЫХ УСТРОЙСТВ
(1687—1694)
1687 |
РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ |
РЗ |
|
||
ТОНОМЕТРА СОЛОНИНКИНА |
|
|
|
И |
|
|
|
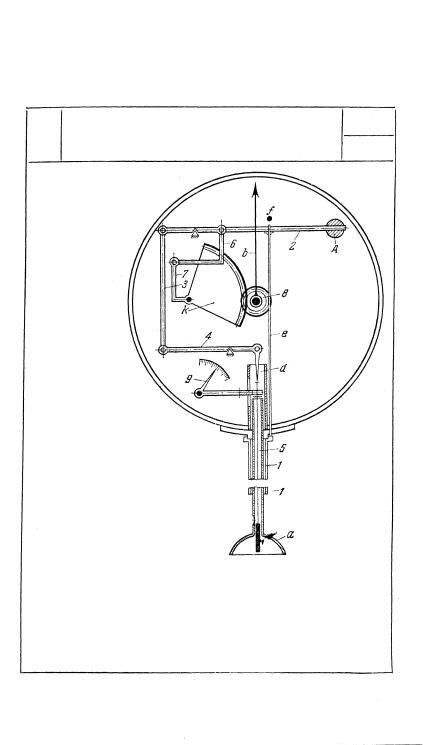
При измерении внутриглазного давления тонометр устанавливают вогнутой площадкой а на глаз и постепенно опускают муфту 1 вниз. Вместе с муфтой опускается шпилька е, а за
ней |
опускается груз А |
звена 2. |
|
Действие груза |
А через |
звенья |
|
2, 3 |
и 4 передается на штифт |
||
5, |
который |
вдавливается в |
|
глаз. Стрелка b, регистрирующая силу давления на глаз, по-
лучает движение при опускании груза А через звенья 2, 6, 7, зубчатый сектор k и зубчатое колесо 8. Если штифт 5 при установке на глаз был в достаточном соприкосновении со штифтом d рычага 4, то контрольная стрелка 9 начинает отклоняться одновременно со стрелкой b. Если отклонение контрольной стрелки начинается позднее отклонения стрелки b, то движение груза A, показанное стрелкой b, до этого момента сделано вхолостую, и это отклонение не учитывается. Штифт f служит
для ограничения подъема груза под действием шпильки е.
85

1688 |
РЫЧАЖНО-ЗУБЧАТЫЙ |
РЗ |
|
||
МЕХАНИЗМ ПАССИМЕТРА |
|
|
|
И |
|
|
|
При помещении мерительной головки 1 в измеряемое отверстие штифт 2 оттягивается назад нажимом кнопки 3, которая давит на рычаг 4, поворачивая его относительно неподвижной оси A; при этом конец его а упирается в выступ рычага 5. Рычаг 5 поворачивается относительно оси В и шариком d давит на штифт b, отводя в сторону втулку 6 со штифтом 2. После освобождения кнопки 3 рычаг 5 под действием пружин 7 и 8 устанавливается вертикально, а штифт 2 под действием рычага 5 и пружины 9 выдвигается вперед. К мерительной головке 1 привинчена пластинка е, край которой отшлифован сферически с радиусом, немного меньшим, чем радиус проверяемого отверстия, а так как часть пластинки против штифта 2 срезана, то контакт с отверстием будет в двух точках f, расположенных друг от друга на 120°, и на сферическом конце штифта 2. Отклонение размера отверстия от его номинальной
величины фиксируется на шкале k.
86

1689 |
РЫЧАЖНО-ЗУБЧАТЫЙ |
РЗ |
|
||
МЕХАНИЗМ ПАССИМЕТРА |
|
|
|
И |
|
|
|
Звено 1, двигаясь поступательно, поворачивает пальцем а коленчатый рычаг 2 вокруг неподвижной оси В. Зубчатым сегментом b рычага 2 движение передается через зубчатое колесо 3 стрелке 4. Спиральная пружина 5 служит для силового замыкания рычага 2, пружина 6 — для обратного хода звена 1. Для освобож-
дения изделия А нажимают штифт 7, который действует на рычаг 8. Рычаг 8, вращаясь вокруг неподвижной оси С, своим концом отодвигает звено 1.
1699 |
РЫЧАЖНО-ЗУБЧАТЫЙ |
РЗ |
|
||
МЕХАНИЗМ ПАССИМЕТРА |
|
|
|
И |
|
|
|
Измерительный стержень 1 давит на рычаг 2 с зубчатым сегментом а, который, поворачиваясь относительно неподвижной оси A, передает движение зубчатому колесу 3 со стрелкой b. Пружина 4 обеспечивает
сцепление |
по одной |
стороне |
|
зубьев и |
устраняет |
мертвый |
|
ход. Пружина 5 |
создает изме- |
||
рительное |
усилие. |
||
87

1691 |
РЫЧАЖНО-ЗУБЧАТЫЙ |
|
МЕХАНИЗМ ОРТОТЕСТА |
||
|
Измерительный стержень 1 через рычаг 2 с зубчатым сегментом а, вращающийся вокруг неподвижной оси A, передает движение зубчатому колесу 3 со стрелкой b. Пружина 4 обеспечивает сцепление по одной стороне зубьев и устраняет возможность мертвого хода. Пружина 5 прижимает измерительный стержень 1 к изде-
лию d.
РЗ
И
88
|
РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ |
РЗ |
|
1692 |
|
||
МИКРОННОГО ИНДИКАТОРА |
И |
||
|
|||
|
|
При подъеме измерительный стержень 1 давит на рычаг 2, поворачивая его относительно неподвижной оси A; при этом конец а рычага 2 перемещает влево рейку 3, движение которой через зубчатые колеса 4 и 5 передается зубчатому колесу 6 со стрелкой b. Пружина 7 служит для уничтожения мертвого хода, а пружина 8 — для возврата рейки в исходное положение и для кинематического замыкания рейки 3, звена 2 и стерж-
ня 1.
89

1693 |
РЫ ЧАЖНО-ЗУБЧАТЫЙ |
РЗ |
|
||
МЕХАНИЗМ ИНДИКАТОРА |
|
|
|
И |
|
|
|
При |
подъеме |
измерительный |
|||
стержень 1 давит на |
рычаг |
2 |
|||
с зубчатым сегментом а, пово- |
|||||
рачивая его относительно непо- |
|||||
движной оси A; при этом сег- |
|||||
мент а |
поворачивает зубчатое |
||||
колесо 3 со стрелкой b, Пло- |
|||||
ская пружина 4 возвращает сег- |
|||||
мент а в исходное положение, |
|||||
а пружины 5 возвращают из- |
|||||
мерительный стержень 1 в ис- |
|||||
ходное |
положение. |
Рычаг |
6 |
||
служит |
для |
предваритель- |
|||
ного |
подъема |
измерительного |
|||
|
|
стержня 1. |
|
|
|
1694 |
РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ |
РЗ |
|
||
|
САМОЛЕТНОГО АКСЕЛЕРОМЕТРА |
И |
|
|
Акселерометр служит для определения величины перегрузки при фигурном полете самолета. При движении самолета с постоянной скоростью груз 1 удерживается пружинами 3 и 4 в нейтральном положении и стрелка 9 указывает перегрузку, равную единице. При выполнении самолетом фигур на груз 1 действуют инерционные силы. Под действием этих сил груз 1 преодолевает сопротивление пружин 3 и 4 и поворачивает рычаг 2 вокруг оси 6.
Рычаг 2 соединен с осью 6 муфтой 5. Через сектор 7 и трубку 8 поворот передается стрелке 9, которая фиксирует величину перегрузки, возникающей при эволюции самолета.
90