2049 |
КЛИНОВОЙ СТОПОРНЫЙ МЕХАНИЗМ |
РКл |
|
С СИЛОВЫМ ЗАМЫКАНИЕМ |
|
|
03 |
Звено |
1, движущееся |
вдоль оси |
у — у |
в неподвижных |
направляю- |
щих, |
имеет клиновые зубья а. Рей- |
ка 2, |
движущаяся поступательно |
вдоль |
оси х — х, имеет клиновые |
гнезда b. Звено 1 под действием силы Р прижимается к гнездам рейки 2 и застопоривает ее в обоих направлениях.
2050 |
КЛИНОВОЙ СТОПОРНЫЙ МЕХАНИЗМ |
РКл |
|
С СИЛОВЫМ ЗАМЫКАНИЕМ |
|
|
03 |
|
|
Звено 1, движущееся поступательно вдоль оси x — х в неподвижных направляющих, имеет клиновое гнездо а. Звено 2, вращающееся вокруг оси A, имеет клиновые зубья b. Звено 1 под действием силы р прижимается к зубьям звена 2 и застопоривает его в обоих направлениях.
2051 |
КЛИНОВОЙ ПРОСТРАНСТВЕННЫЙ |
РКл |
СТОПОРНЫЙ МЕХАНИЗМ |
03 |
|
С СИЛОВЫМ ЗАМЫКАНИЕМ |
Звено 1, движущееся поступательно вдоль оси х — х в неподвижных направляющих, имеет клиновые зубья а. Звено 2, вращающееся вокруг оси у — y, имеет клиновые гнезда b, расположенные по окружности диска 3. Звено 1 под действием силы Р прижимается к гнездам диска 3 и застопоривает его
в обоих направлениях.

6.МЕХАНИЗМЫ СОРТИРОВКИ, ПОДАЧИ
ИПИТАНИЯ (2052)
2052 |
РЫЧАЖНО-КЛИНОВОЙ МЕХАНИЗМ |
РКл |
ПОДАЧИ С ПЕРЕМЕННОЙ |
СП |
|
СКОРОСТЬЮ ВРАЩЕНИЯ |
Валу A с жестко насаженным на него зубчатым колесом 1 сообщается вращение с постоянной угловой скоростью в направлении, показанном стрелкой. При этом втулке 2 сообщается вращение посредством зубчатого колеса 3. Вследствие заклинивания роликов 4 обойме 5 сообщается вращение в том же направлении, причем валу В движение передается посредством зубчатых колес 6 и 7. В течение первой половины оборота вала А шатун 8 поворачивает обойму 9 против часовой стрелки; в течение второй половины оборота — по часовой стрелке. Так как обойме 9 сообщается большая угловая скорость, чем втулке 2, то в этом случае ролики 10, ра-
|
|
|
|
|
|
|
|
|
нее находящиеся |
в |
покое, заклиниваются, |
и обойме 5 |
вместе |
с |
валом |
В |
сообщается |
большая |
угловая |
ско- |
рость, |
чем |
в |
предыдущем случае. |
Ролики |
4 находятся |
в свободном |
состоянии до тех пор, пока |
шатун |
8 не |
начнет поворачиваться против часовой стрелки. Таким образом вал В, получая попеременно высокое и низкое число оборотов, сообщает импульсы механизму подачи.
7. МЕХАНИЗМЫ МУФТ И СОЕДИНЕНИЙ
(2053)
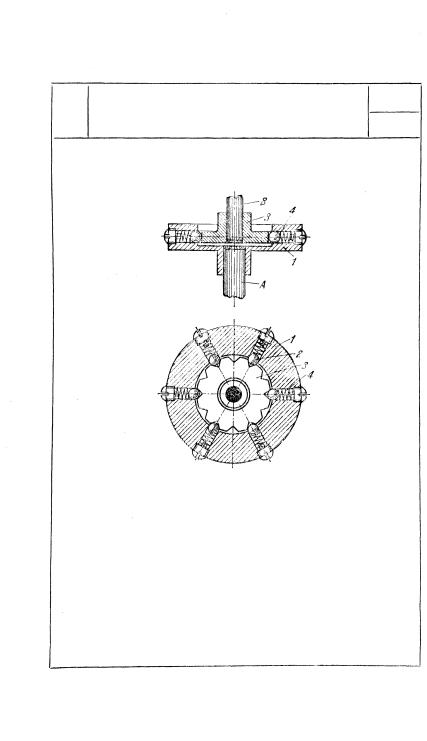
2053 |
КЛИНОВОЙ МЕХАНИЗМ |
РКл |
|
ШАРИКОВОЙ МУФТЫ |
|
|
МС |
|
|
Вращение диска 1, жестко соединенного с валом А, с помощью шариков 2, входящих в гнезда диска 5, передается валу В, жестко с ним соединенному. Если момент на валу В становится больше допустимого, то шарики 2, преодолевая сопротивление пружин 4, отжимаются из гнезд диска 3, причем передача вращения от
вала А к валу В прекращается.
8.МЕХАНИЗМЫ ИЗМЕРИТЕЛЬНЫХ
ИИСПЫТАТЕЛЬНЫХ УСТРОЙСТВ (2054—2056)
2054 |
Р Ы Ч А Ж Н ЫЙ КЛИНОВОЙ МЕХАНИЗМ |
РКл |
|
ДИНАМОМЕТРА ДРОНОВА И ЛОКАЙ |
|
|
И |
|
|
Тяга 1 закрепляется в неподвижной точке А. Под действием силы Р, приложенной к тяге 2, ролики 3 скользят по скосам а, вследствие чего звенья 4 и 5 сближаются, сжимая пружину 6. Перемещение звена 4 передается с помощью рейки b зубчатому колесу 7, стрелка которого регистрирует величину приложенной силы Р. После прекращения действия
силы |
Р пружина 6 возвращает звенья |
4 |
и 5 в исходное положение. |
2055 |
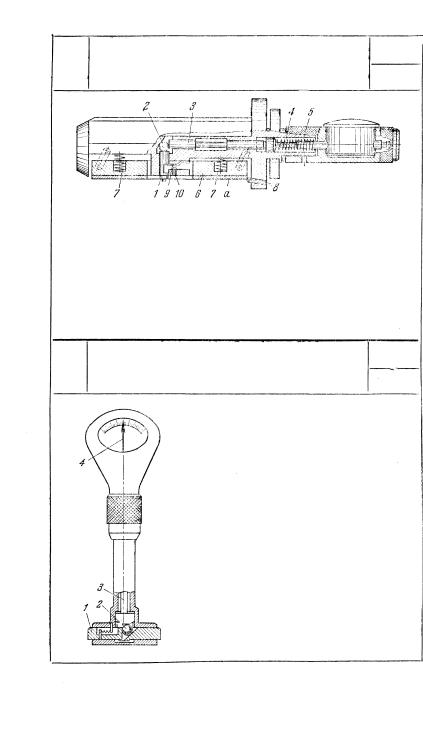
КЛИНОВОЙ МЕХАНИЗМ ПРИБОРА |
РКл |
ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРОВ |
|
|
ОТВЕРСТИЙ |
И |
При отклонении измеряемого диаметра отверстия от требуемой величины перемещение штифта 1 передается через шарик 2, перемещающийся по наклонной плоскости, и стержень 3 мерительному штифту 4 индикатора с дружиной 5. Пружина 9 обеспечивает постоянный контакт деталей 1, 2 и 3. Планка 6 с пластинками а посредством пружин 7 отжимается к образующим проверяемого отверстия. Величина перемещения планки 6 регулируется винтом 8. Величина перемещения штифта 1 регулируется пружиной 9, которая в свою очередь регулируется винтом 10, чем дается требуемый натяг стрелке инди-
|
катора. |
2056 |
РКл |
КЛИНОВОЙ МЕХАНИЗМ МИКРОТАСТА |
И
Перемещение мерительного штифта 1 передается через шарик 2 на стержень 3, от которого посредством системы рычагов движение передается стрелке 4 прибора. Поворачивая при^ бор относительно оси отверстия, можно по отклонению стрелки определить отклонение от окружности, а
передвижением прибора |
вдоль оси |
отверстия — определить |
конусность. |
9.МЕХАНИЗМЫ МОЛОТОВ, ПРЕССОВ
ИШТАМПОВ (2057)
РКл
2057 КЛИНОВОЙ МЕХАНИЗМ ПРЕССА
МП
Звено 1, скользящее своими концами
b в неподвижных направляющих зре-
на 3, имеет клиновые скосы а, которыми скользит до соответствующим
скосам звеньев 2. При движении звена 1 в направлении, указанном стрелкой A, звенья 2 движутся в направ-
лении, указанном стрелками B и С. При этом палец с и пальцы d произ-
водят требуемые операции прессования.
11. МЕХАНИЗМЫ ЗАХВАТОВ, ЗАЖИМОВ И РАСПОРОВ (2059—2063)
РКл
2059 КЛИНОВОЙ МЕХАНИЗМ ЗАЖИМА
33
Винт 5 перемещает звено 4, имеющее в нижней части скос а — а. Звено 4 скользит по скосу звена 3, перемещая его в горизонтальном направлении. Звено 3 имеет скос b — b. Звено 2 скользит по скосу звена 3
и зажимает деталь 1.
|
2060 |
РЫЧАЖНО-КЛИНОВОЙ МЕХАНИЗМ |
|
ЗАЖИМА С ВИНТОМ |
|
|
Винт 5 перемещает звено 4, имеющее в нижней части скос а — а. Звено 4 скользит по скосу звена 3, перемещая его в горизонтальном направлении. Звено 3 в точке А воздействует на рычаг 2, вращая его вокруг неподвижной оси В и тем самым осуществляя зажим де-
тали 1.
2061 |
РЫЧАЖНО-КЛИНОВОЙ МЕХАНИЗМ |
РКл |
|
ЗАЖИМА С ГАЙКОЙ |
|
|
33 |
Звено 4 имеет винтовую |
резьбу, |
на которую навинчивается |
гайка |
5, перемещающая звено 4. В теле звена 4 имеется двойной скос а—а. Звено 4 скользит по скосу звена 3, Перемещая его в горизонтальном направлении. Звено 3 в точке А бездействует на рычаг 2, вращая его вокруг оси В и тем самым осуществляя зажим детали 1.
РКл
2062 РЫЧАЖНО-КЛИНОВОЙ МЕХАНИЗМ ЗАЖИМА
33
Зажим детали производится рычагами 2 и 2' вращающимися вокруг осей А и В, под действием конического клина 8, перемещающегося с помощью винта.