

Кафедра ДМ 09 04 2013 / Артоболевский И.И. Механизмы в современной технике, в 7 томах, 1979-1981 гг / Артоболевский 3
.pdf2017 |
МЕХАНИЗМ ПРИВОДА РАМЫ РАССЕВА |
РУ |
|
||
С УПРУГИМИ ЗВЕНЬЯМИ |
|
|
|
ВМ |
|
|
|
Вращение |
от |
вала 1 передается валам 2 и 3 |
||
при |
помощи |
|
конических зубчатых колес 4, 5, |
|
6. Массы |
т1 |
|
и т2 закреплены на валах 2 и 3 |
|
посредством |
направляющих а и b и пружин 7. |
|||
Массы т1 |
и |
т2 вместе с направляющими вра- |
||
щаются |
в |
|
противоположных направлениях. |
|
Под |
воздействием неуравновешенных масс т1 |
|||
и т2 |
рама 8 рассева совершает колебательное |
|||
движение |
в |
направлении, указанном стрелкой. |
||
311
2018 |
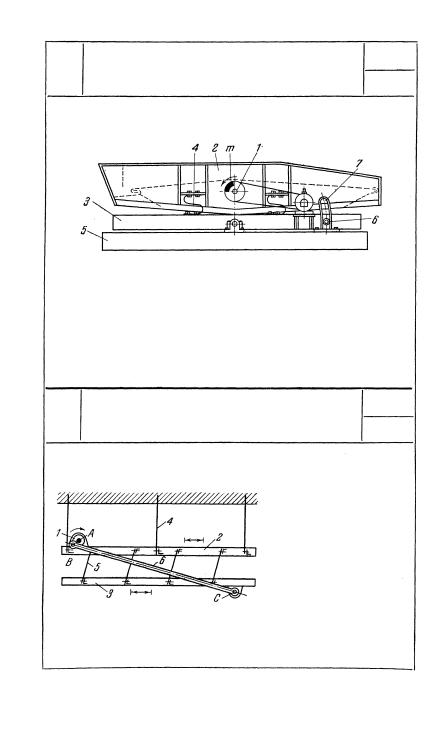
МЕХАНИЗМ РАССЕВА |
РУ |
|
||
С УПРУГИМИ ЗВЕНЬЯМИ |
|
|
|
ВМ |
|
|
|
Рама 3 рассева укреплена на неподвижной раме 5 болтом 6, скользящим в дуговой направляющей 7 так, чтобы рассев мог быть установлен с необходимым наклоном. Корпус 2 рассева соединяется с рамой 3 посредством четырех S-образных пружин 4. На валу корпуса 2 укрепляется неуравновешенная масса т. При вращении вала 1 под воздействием неуравновешенной массы m и пружин 4 корпус рассева совершает колеба-
тельное движение.
2019 |
ШАРНИРНО-РЫЧАЖНЫЙМЕХАНИЗМ |
РУ |
|
||
ГРОХОТА С УПРУГИМИ ЗВЕНЬЯМИ |
|
|
|
ВМ |
|
|
|
Кривошип 1 вращается вокруг оси А рамы 2, подвешенной к стойке на плоских пружинах 4. Шатун 6 входит во вращательную пару В с кривошипом 1 и во вращательную пару С с рамой 3, подвешенной к раме 2 на плоских пружинах 5. При
вращении кривошипа 1 рамы 2 и 3 совершают колебательные движения.
312

2020 |
МЕХАНИЗМ ГРОХОТА |
РУ |
|
||
С УПРУГИМИ ЗВЕНЬЯМИ |
|
|
|
ВМ |
|
|
|
Шатун 4 входит во вращательную пару В с кривошипом 1, вращающимся вокруг неподвижной оси A, и во вращательную пару С с рамой 2. Рама 2 соединена со стойкой плоскими пружинами 8. При вращении кривошипа 1 рама 2 совершает колебательное движение.
2021 |
МЕХАНИЗМ ГРОХОТА |
РУ |
|
||
С УПРУГИМИ ЗВЕНЬЯМИ |
|
|
|
ВМ |
|
|
|
Рама 2 связана с неподвижным звеном тремя пружинами а равной длины и параллельно расположенными. На диске 1 закреплена неуравновешенная масса m. При вращении диска 1 рама 2 совершает колебательное движение.
313

2022 |
МЕХАНИЗМ ГРОХОТА |
РУ |
|
||
С УПРУГИМИ ЗВЕНЬЯМИ |
|
|
|
ВМ |
|
|
|
Рама 2 связана с неподвижным звеном четырьмя одинаковыми и параллельно расположенными пружинами b. Кор-
пус а, несущий на себе диски 1, соединен с рамой 2 с помощью пружин 3 и 4. На дисках 1 закреплены неуравновешенные массы т. При вращении дисков 1 рама 2 совершает колебатель-
ное движение.
2023 |
МЕХАНИЗМ ЦЕНТРОБЕЖНОГО |
РУ |
|
||
ВИБРАЦИОННОГО РАССЕВА |
|
|
|
ВМ |
|
|
|
Корпус сит 3 закреплен на полом валу 2, покоящемся на пружинах 4 и соединенном с приводом от двигателя b пружиной 5. Вал 1, покоящийся в подшипниках, смонтированных внутри вала 2, несет на себе неуравновешенную массу т. Вал
1 приводится в движение двигателем а. Валы 1 и 2 вращаются с различными числами оборотов, при этом сита 3, вращаясь, совершают колебательное движение.

XI
РЫЧАЖНО-КЛИНОВЫЕ МЕХАНИЗМЫ
РКл
1. Механизмы трехзвенные общего назначения Т (2024—2039). 2. Механизмы четырехзвенные об-
щего назначения Ч |
(2040-2042). 3. |
Механизмы |
|||
шесгизвенные |
общего |
назначения |
III |
(2043). |
|
4. Механизмы |
с остановками |
О (2044). 5. |
Меха- |
||
низмы остановов, стопоров и |
запоров |
ОЗ |
(2045— |
||
2051). 6. Механизмы сортировки, подачи и питания СП (2052). 7. Механизмы муфт и соединений МС (2053). 8. Механизмы измерительных и испытательных устройств И (2054—2056). 9. Механизмы молотов, прессов и штампов МП (2057). 10. Механизмы тормозов Тм (2058). 11. Механизмы захватов, зажимов и распоров 33 (2059— 2063). 12. Механизмы прочих целевых устройств
ЦУ (2064).


1. МЕХАНИЗМЫ ТРЕХЗВЕННЫЕ ОБЩЕГО НАЗНАЧЕНИЯ (2024—2039)
РКл
2024 ТРЕХЗВЕННЫЙ КЛИНОВОЙ МЕХАНИЗМ
Т
РКл
2025 ТРЕХЗВЕННЫЙ КЛИНОВОЙ МЕХАНИЗМ
Т
317

РКл
2026 ТРЕХЗВЕННЫЙ КЛИНОВОЙ МЕХАНИЗМ
Т
Звено 1, выполненное в виде клина, скользит в неподвижных направлящих а — а звена 3, входя в поступательную пару b со звеном 2, скользящим в неподвижных направляющих d — d звена 3. Прямолинейно-поступательное движение звена 1 преобразуется в прямолинейно-поступательное движение звена 2
в перпендикулярном направлении.
РКл
2027 ТРЕХЗВЕННЫЙ КЛИНОВОЙ МЕХАНИЗМ
Т
Звено 1, скользящее в неподвижных направляющих а — а звена 3, имеет жестко связанный с ним сухарь с, скользящий в направляющих d — d звена 2, которое скользит в неподвижных направляющих b — b звена 3. Прямолинейно-поступательное движение звена 1 преобразуется в прямолинейно-поступательное движение звена 2 в перпендикулярном на-
правлении.
318

РКл
2028 ТРЕХЗВЕННЫЙ КЛИНОВОЙ МЕХАНИЗМ
Т
Звено 1, скользящее в подвижных направляющих а — а звена 2, имеет жестко связанный с ним сухарь с, скользящий в неподвижных направляющих d звена 3. Звено 2 скользит по неподвижным направляющим b звена 3. Поступательное движение звена 1 в направлении, указанном стрелкой, преобразуется в поступательное движение звена 2 в направлении, образующем угол 90° — а с направлением
движения звена 1.
РКл
2029 ТРЕХЗВЕННЫЙ КЛИНОВОЙ МЕХАНИЗМ
Т
Звено 1, выполненное в виде уголкового клина, скользит в уголковой прорези а стойки, входя в поступательную пару b со звеном 2, скользящим в неподвижных направляющих с — с. Прямолинейное поступательное движение звена 1 преобразуется в прямолинейно-поступательное движение звена 2 в пер-
пендикулярномнаправлении.
