

Кафедра ДМ 09 04 2013 / Артоболевский И.И. Механизмы в современной технике, в 7 томах, 1979-1981 гг / Артоболевский 3
.pdfIX
МЕХАНИЗМЫ РЫЧАЖНЫЕ С ГИБКИМИ ЗВЕНЬЯМИ РГ
I.Механизмы четырехзвенные общего назначения
Ч(1767—1770). 2. Механизмы пятизвенные общего назначения П (1771—1775). 3. Механизмы ше-
стизвенные общего назначения Ш (1776—1796). 4. Механизмы многозвенные общего назначения М (1797—1820). 5. Механизмы с остановками О (1821—1838). 6. Механизмы гусеничные Г (1839— 1865). 7. Механизмы измерительных и испытательных устройств И (1866—1867). 8. Механизмы сортировки, подачи и питания СП (1868—1869). 9. Механизмы тормозов Тм (1870—1880). 10. Механизмы качающихся гусениц КГ (1881—1901). 11. Механизмы весов В (1902—1903). 12. Механизмы грузоподъемных устройств Гп (1904—1909).
13. Механизмы для воспроизведения кривых ВК (1910—1912). 14. Механизмы сателлитные С (1913—1969). 15. Механизмы прочих целевых устройств ЦУ (1970-1973).

1. МЕХАНИЗМЫ ЧЕТЫРЕХЗВЕННЫЕ ОБЩЕГО НАЗНАЧЕНИЯ (1767—1770)
|
ШАРНИРНО-РЫЧАЖНЫЙ ПЛАНЕТАРНЫЙ |
РГ |
1767 |
МЕХАНИЗМ С ГИБКИМ ЗВЕНОМ |
|
|
ДЛЯ ОЧИСТКИ СТЕКОЛ АВТОМОБИЛЯ |
Ч |
Гибкое звено 1 охватывает неподвижный шкив 4 и шкив 3, который свободно вращается на водиле 2. Привод водила осуществляется от звена 5 специальным механизмом. Со шкивом 3 жестко связаны стержни а, на которых крепятся щетки. При качании рычага 2 шкив 3 и вместе с ним стержень а со щеткой вращаются
попеременно в разные стороны.
153
1768 |
РЫЧАЖНЫЙ МЕХАНИЗМ С ГИБКИМ |
РГ |
|
||
И УПРУГИМ ЗВЕНЬЯМИ |
|
|
|
Ч |
|
|
|
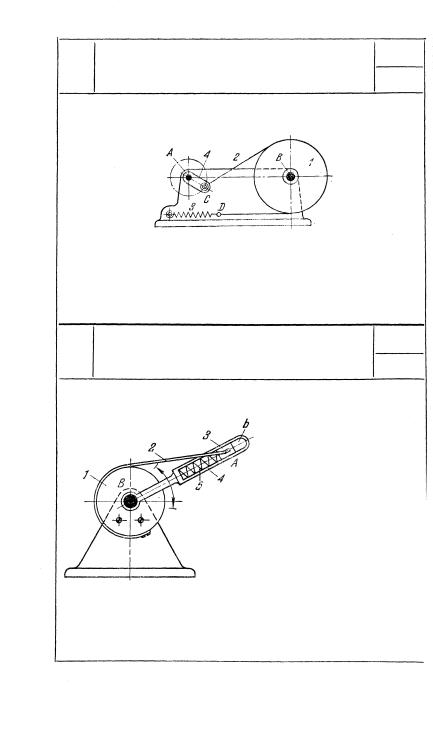
Через шкив 1 перекинуто гибкое звено 2, один конец которого в точке С присоединен к кривошипу 4, а другой конец в точке D к пружине 3. Вращение вала А вызывает попеременное вращение вала В в различных направлениях.
1769 |
КУЛИСНО-РЫЧАЖНЫЙ МЕХАНИЗМ |
РГ |
|
||
С ГИБКИМ И УПРУГИМ ЗВЕНЬЯМИ |
|
|
|
Ч |
|
|
|
Шкив 1 жестко связан со стойкой. Гибкое звено 2, ох-
ватывающее |
шкив, в точке |
|
А прикреплено |
к ползуну 3, |
|
скользящему |
в |
направляю- |
щей b кулисы 4. При вращении кулисы 4 вокруг неподвижной оси В по часовой стрелке гибкое звено 2, наматываясь на шкив, перемещает ползун 3 в направляющей b. При этом ползун 3
преодолевает усилие пружины 5. Когда ползун 3 достигает предельного положения, кулиса 4 начинает вращаться в обратном направлении.
154

|
РЫЧАЖНЫЙ МЕХАНИЗМ С ГИБКИМ |
РГ |
|
И УПРУГИМ ЗВЕНЬЯМИ |
|
|
|
|
1770 |
ДЛЯ ПРЕОБРАЗОВАНИЯ |
|
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ |
Ч |
|
В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ |
||
|
Рукоятке 1, вращающейся вокруг неподвижной оси A, сообщается вращение в направлении, показанном стрелкой. Диск 2, свободно насаженный на вал A, остается в покое до тех пор, пока конец рукоятки 1 не попадет в желоб а диска 2. После этого диск 2 начинает поворачиваться вместе с рукояткой 1 и ползун 3, соединенный стальной лентой с диском 2, перемещается влево. Рукоятка 1, дойдя до упора 5, имеющего скос, выходит из желоба а, и ползун 3 под действием пружины 6 перемещается вправо. Диск 2 при этом поворачивается
вобратную сторону. Рукоятка 1, продолжая поворачиваться
втом же направлении, попадает в желоб b, и ползун 3 снова
перемещается влево. Дойдя до упора 7, рукоятка 1 освобождает стальную ленту 4 от натяжения, и ползун 3 перемещается вправо под действием пружины 6. Таким образом, за каждый оборот вала А ползун 3 совершает два двойных хода.
155

2. МЕХАНИЗМЫ ПЯТИЗВЕННЫЕ ОБЩЕГО НАЗНАЧЕНИЯ (1771 — 1775)
1771 |
РЫЧАЖНЫЙ МЕХАНИЗМ НОЖНОГО |
РГ |
ПРИВОДА С ГИБКИМ |
П |
|
|
И УПРУГИМ ЗВЕНЬЯМИ |
В точке A рычага 1 закреплено гибкое звено 2. Далее это звено обернуто на угол 360° вокруг шкива 3 и второй конец гибкого звена закреплен в точке В упругого звена 4. Периодическим нажатием рычага 1 шкиву 3 сообщается вращение в одном направлении. Вращение в противоположном направлении осуще-
ствляется упругим звеном 4.
156

1772 |
РЫЧАЖНЫЙ НОЖНОЙ ПРИВОД |
РГ |
|
||
С ГИБКИМ ЗВЕНОМ |
|
|
|
|
Гибкое звено 2 одним концом закреплено в точке А рычага 1. Далее звено 2 перекинуто через блок 3 и вторым концом закреплено в точке В маховика 4. Подъем рычага 1 в исходное положение происходит за счет инерции массы маховика 4.
Нижнее положение рычага 1 показано штрих-пунктиром.
1773 |
КУЛИСНЫЙ МЕХАНИЗМ |
РГ |
|
||
С ГИБКИМ ЗВЕНОМ |
|
|
|
|
Шкив 1, вращающийся вокруг неподвижной оси D, гибким звеном 3 приводит во вращение вокруг неподвижной оси В шкив 2. Палец а гибкого звена 3 скользит в прорези b кулисы 4, вращающейся вокруг неподвижной оси А. При вращении шкива 1 вокруг оси D кулиса 4 качается вокруг оси А. Изменяя положение осей вращения шкивов, можно получить различные законы движения кулисы 4 за один полный цикл движения меха-
низма.
157

1774 КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ С ГИБКИМ ЗВЕНОМ
РГ
П
Коромысло 1 приводится в качательное движение кривошипом 3 посредством промежуточного звена 4. При повороте коромысла 1 гибкое звено 2 наматывается и сматывается с профилированного сектора
а — а коромысла 1.
1775 |
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ |
РГ |
|
||
С ГИБКИМ ЗВЕНОМ |
|
|
|
П |
|
|
|
158

3. МЕХАНИЗМЫ ШЕСТИЗВЕННЫЕ ОБЩЕГО НАЗНАЧЕНИЯ (1776—1796)
1776 |
ШАРНИРНО-РЫЧАЖНЫЙ |
РГ |
ПЛАНЕТАРНЫЙ МЕХАНИЗМ |
|
|
|
НАТЯЖНОГО РОЛИКА |
Ш |
Гибкое звено |
1 |
охватывает |
шкив 2. По внутренней поверх- |
||
ности шкива 2 |
перекатываются |
|
ролики-сателлиты 3, |
входящие |
|
в пары вращения с водилом 8. |
||
Одновременно с этим ролики 3 |
||
перекатываются |
по |
неподвиж- |
ному колесу 4. |
Водило 8, воздействуя через звено 5 на рычаг |
|
6 с натяжным роликом 7, осуществляет натяжение гибкого звена 1.
1777 |
ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ |
РГ |
||
|
||||
С ГИБКИМ ЗВЕНОМ |
|
|||
|
Ш |
|||
|
|
|
|
|
Через шкивы 1 и 5 равных |
|
|||
диаметров перекинуто гибкое |
|
|||
звено 2. В точке С гибкое зве- |
|
|||
но 2 входит во вращательную |
|
|||
пару со |
звеном 3, |
которое |
в |
|
свою очередь входит во враща- |
|
|||
тельную |
пару В со |
звеном |
4. |
|
При движении точки С по пря- |
|
|||
молинейным частям траектории |
|
|||
движение звеньев 3 и 4 экви- |
|
|||
валентно движению шатуна |
и |
|
||
кривошипа дезаксиальногокри- |
|
|||
вошипно - ползунного механиз- |
|
|||
ма ABC. |
При движении точ- |
|
||
ки С по круговым частям траектории движение звеньев 3 и 4 будет эквивалентно движени-
ям шатуна и коромысла четырехзвенного шарнирного механизма, у которого длина кривошипа равна радиусам шкивов.
159

|
КРИВОШИПНО-КОРОМЫСЛОВЫЙ |
РГ |
1778 |
МЕХАНИЗМ С ПРИСОЕДИНЕННЫМ |
ш |
|
С ПОМОЩЬЮ ГИБКИХ ЗВЕНЬЕВ ПОЛЗУНОМ |
Звено 5 шарнирно-рычажного механизма ABCD имеет круговой сектор а — а. Стальные ленты 3 и 4 концами b и с закреплены на ползуне 2. Концами b' и с' эти ленты закреплены на секторе а. При вращении кривошипа 1 ползун 2 приводится в возвратно-поступательное движение в направляющих d.
1779 |
КУЛИСНЫЙ МЕХАНИЗМ |
РГ |
|
||
С ГИБКИМИ ЗВЕНЬЯМИ |
|
|
|
Ш |
|
|
|
Кулиса |
4 |
имеет круговой |
||||
сектор а. На валу D на- |
||||||
сажен шкив |
3. |
Стальные |
||||
ленты 1 |
и |
2 концами |
b |
|||
и с закреплены |
на шки- |
|||||
ву |
3, |
а |
|
концами |
b' |
|
и |
с' — на |
секторе а. При |
||||
вращении |
кривошипа |
5 |
||||
кулисного |
|
механизма |
||||
АСЕ вал D, с которым |
||||||
жестко |
связан |
шкив |
3, |
|||
совершает |
|
вращение |
в |
|||
двух взаимно противоположных направлениях.
160