

Механические передачи
.pdf1.2. Конструкция и материалы ремней
Ремни должны обладать высокой прочностью при переменных напряжениях, износостойкостью, максимальным коэффициентом трения на рабочих поверхностях, минимальной изгибной жесткостью.
Конструкцию ремней отличает наличие высокопрочного несущего слоя, расположенного вблизи нейтральной линии сечения. Повышенный коэффициент трения обеспечивается пропиткой ремня или применением обкладок.
Рис. 1.4. Формы сечения ремней
Плоские ремни отличаются большой гибкостью из-за малого отношения толщины ремня к его ширине. Наиболее перспективны синтетические ремни ввиду их высокой прочности и долговечности. Несущий слой этих ремней выполняется из капроновых тканей, полиэфирных нитей. Материал фрикционного слоя – полиамид или каучук.
Синтетические ремни изготовляют бесконечными и используют, как правило, при скорости более 30 м/с. При меньших скоростях могут использоваться конечные прорезиненные или бесконечные кордшнуровые и кордтканевые ремни. Прорезиненные ремни состоят из тканевого каркаса, имеющего от трех до шести слоев и наружных резиновых обкладок. Кордшнуровые ремни состоят
10
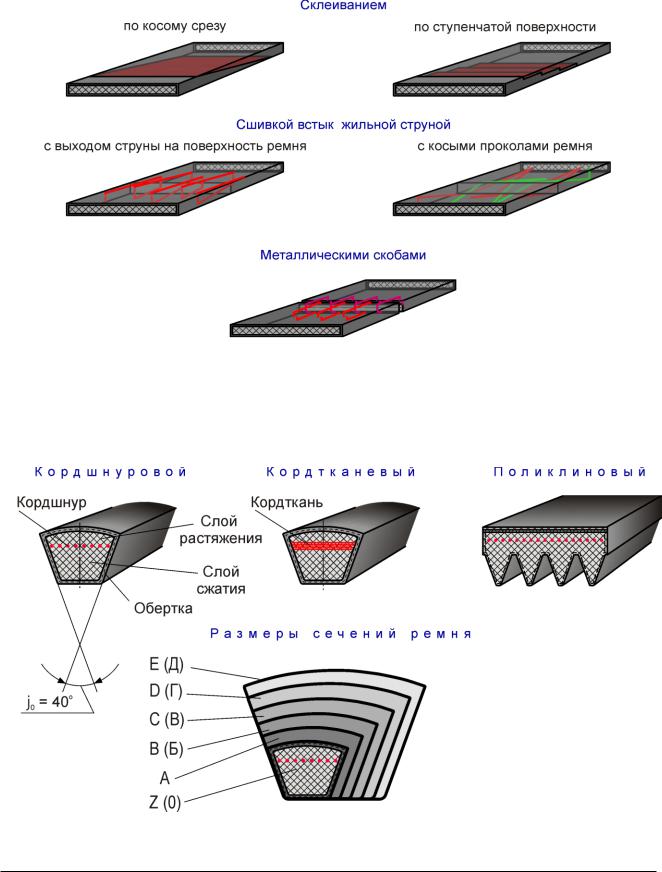
из несущего слоя, содержащего один ряд синтетического кордшнура, связующей резины и тканевых обкладок. Кордтканевые ремни имеют несущий слой из двух слоев обрезиненной вискозной ткани.
Рис. 1.5. Способы соединения плоских ремней
Клиновые ремни имеют трапециевидное сечение с боковыми рабочими сторонами, соприкасающимися с канавками на шкивах. Благодаря клиновому действию ремни этого типа обладают повышенным сцеплением со шкивами.
Рис. 1.5. Клиновые ремни
11

Поликлиновые ремни – бесконечные плоские ремни с продольными клиновыми ребрами на внутренней поверхности. Эти ремни сочетают гибкость плоских ремней и повышенное сцепление со шкивами, характерное для клиновых ремней.
Клиновые и поликлиновые ремни выпускаются прорезиненными с несущим слоем из синтетических шнуров. Для шнуров корда применяют полиамидные и полиэфирные волокна, для передач с особенно высокой нагрузкой - кевлар. Ремни с кордом из кевлара имеют высокую прочность, практически не вытягиваются (модуль упругости при растяжении E=2500 МПа, в отличие от E=300…600 МПа для корда из других волокон). Выпускаются также кордтканевые клиновые ремни с несколькими слоями ткани, они имеют меньший модуль упругости и лучше работают при ударной нагрузке.
Многопрофильные ремни состоят из двух – четырех клиновых, соединенных между собой тканевым слоем и применяются вместо комплектов клиновых ремней.
Круглые ремни выполняют резиновыми диаметром от 3 до 12 мм, используются для передачи небольших мощностей в приборах и бытовой технике.
Ремни квадратного сечения используют для передачи небольших мощностей в приборах.
1.3. Основные геометрические соотношения
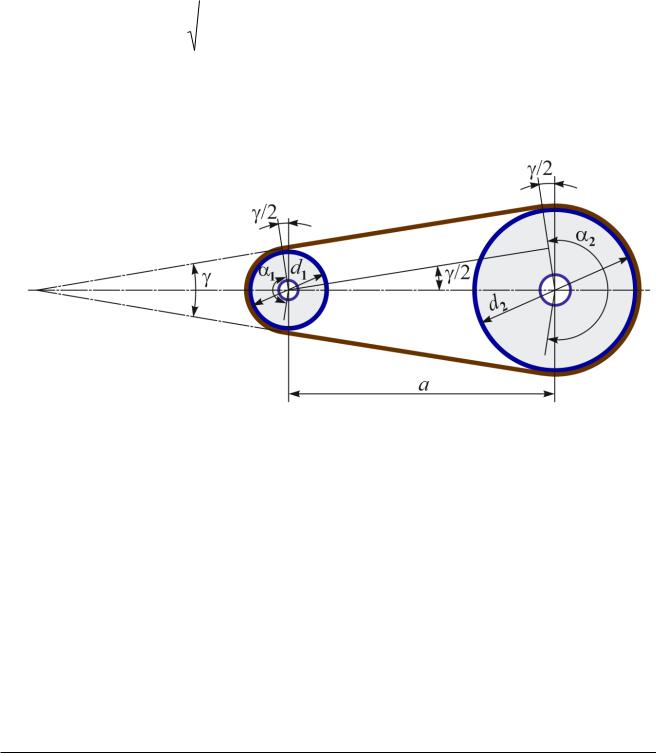
При проектировании ременных передач определяют: угол между ветвями ремня, угол охвата ремнем малого шкива, длину ремня и при использовании бесконечных ремней – межосевое расстояние. Расчетные диаметры шкивов и длины ремней определяют по нейтральному слою поперечного сечения ремня.
Найдём l – длину ремня. По причине растяжения ремня величины α et l определяются приближенно.
Имеем |
|
и |
|
|
|
d2 |
|
d1 |
|
|
|
|
|
|
|
o |
||||||
1 |
sin |
|
|
|
|
|
|
|
|
|
|
(т.к. |
2 |
15 ). |
||||||||
2 |
|
|
2a |
2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Тогда |
|
|
d2 d1 |
|
|
|
d2 |
d1 |
, |
|
|
d2 d1 |
. |
|||||||||
|
|
1 |
|
|
|
2 |
|
|||||||||||||||
|
|
2 |
|
2a |
|
|
|
|
|
|
|
|
|
a |
|
|
|
a |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Половина длины ремня равна: |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
AB CD |
BC |
. |
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
12
|
BC O H a cos ; |
|
|
|
|
|
|
d1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
d2 |
|
|
|
2 |
|
|
|||||||||||||||||||||
Так как |
|
|
AB |
|
|
; |
CD |
|
|
, |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
d |
2 |
|
|
|
d |
2 |
|
d |
1 |
|
|
|
|
|
|
|
d |
1 |
|
|
|
|
|
d |
2 |
d |
1 |
|
|||||||||||||
имеем |
l |
2a cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
a |
|
|
|||||||||||||
или |
|
|
l 2a cos |
|
|
d2 |
d1 |
|
|
|
|
d2 d1 |
. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2a |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Подставляем cos |
|
1 sin 2 |
|
1 |
2 |
|
|
|
|
1 |
2 |
1 |
(d2 d1 )2 |
. |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
8a2 |
|||||||
|
|
|
|
|
|
|
|
|
|
(d |
2 |
d )2 |
|
|
|
|
|
|
|
d |
2 |
|
d |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Откуда |
|
|
l 2a |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
4a |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Величина приближенная.
Рис. 1.6. Расчет длины ремня
1.4. Силы в ременной передаче
a) Окружная сила
F |
2T kF |
|
P kF |
, |
|
|
|||
t |
d |
|
v |
|
|
|
|||
где T – вращающий момент (Н м), d – диаметр шкива (м),
P – передаваемая мощность (Вт), v – скорость ремня (м/с),
kF – коэффициент динамичности нагрузки,
13
(kF меняется от 1 до 1,6 для ударной нагрузки).
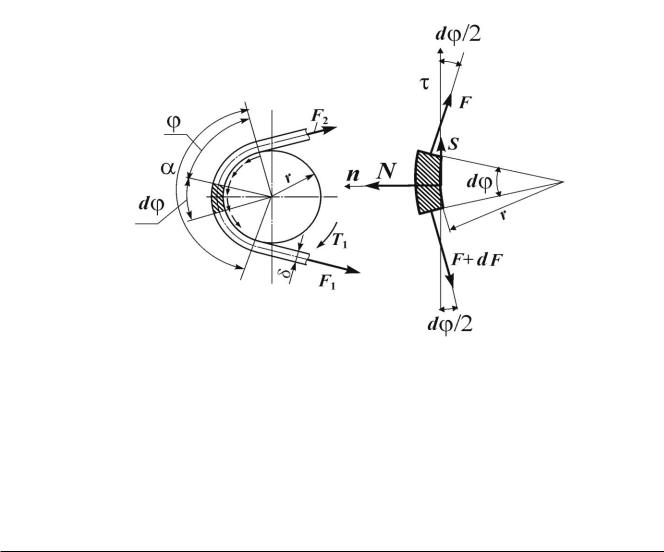
б) Силы натяжения ветвей
Разность натяжений ветвей ремня можно найти из формулы Эйлера. Предположим, что:
–ремень нерастяжим;
–имеет место критическое равновесие ремня относительно шкива;
–центробежные силы малы.
Рассмотрим элемент реммя длиной r dφ, (r – радиус шкива).
Силы F и F dF – силы действия ремня на рассматриваемый элемент; S - сила сцепления со шкивом; N – нормальная реакция шкива.
F ,F dF ,S, N ~ 0.
Проецируя на оси n и τ, получим (если принять sin d / 2 d / 2 ;
cos d / 2 1):
Рис. 1.7. Силы натяжения ветвей ремня
|
F F F dF S 0 |
S dF ; |
|
|
|
Fn |
F F dF d / 2 N 0 N Fd , dF d / 2 0 . |
|
Т.к. |
S fN , следовательно, dF f Fd , где f – коэффициент сцеп- |
|
ления с ободом.
14
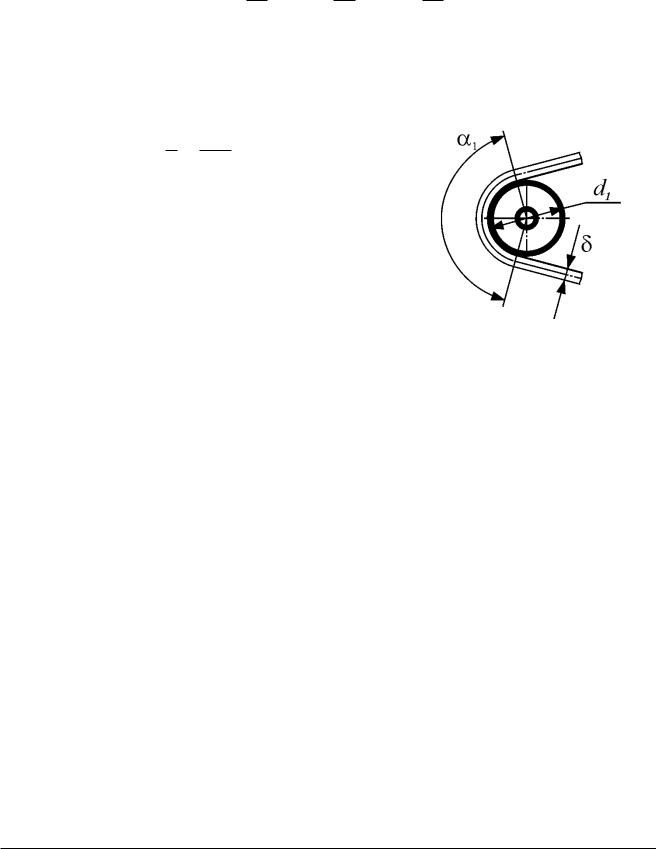
Интегрируя, получим:
F1 e f q , F2
γ угол скольжения, 0,7 , где α –угол обхвата.
F1 F2 Ft - окружная сила
F1 Ft |
q |
|
|
1 |
|
|
|
||
|
|
и F2 Ft |
|
|
. |
|
|||
q 1 |
|
q 1 |
|
||||||
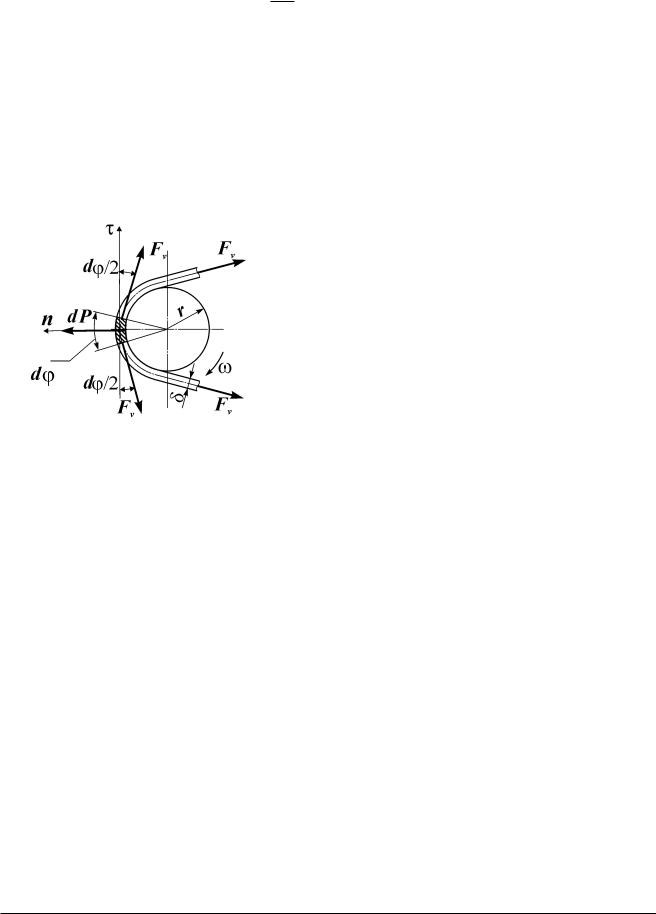
в) Центробежные силы |
|
|
|
|
|
|
|
||
|
|
|
На малый элемент ремня действует |
||||||
|
|
|
центробежная сила (рис. 1.8). |
||||||
|
|
|
dP |
V 2 |
dm |
V 2 |
r b d AV 2d |
||
|
|
|
r |
r |
|||||
|
|
|
|
|
|
|
|||
где ρ – плотность; δ – толщина;
b – ширина;
A b – площадь сечения.
Рис. 1.8. Центробежные силы
Fv , Fv , dP ~ 0.
Проецируя на ось n, получим:
dP 2Fvsin d / 2 Fv d .
Следовательно Fv dP / d AV 2 .
Эта сила при скоростях меньших 15 м/с пренебрежима.
15
г) Силы предварительного натяжения
При установке ремень должен быть предварительно натянут с силой F0.
Принимают
|
2F0 F1 |
F2 . |
|
Поскольку |
|
|
F1 F2 |
Ft , |
|
получим |
|
Рис. 1.9. |
Ft F0 Ft / 2, |
F2 F0 Ft / 2. |
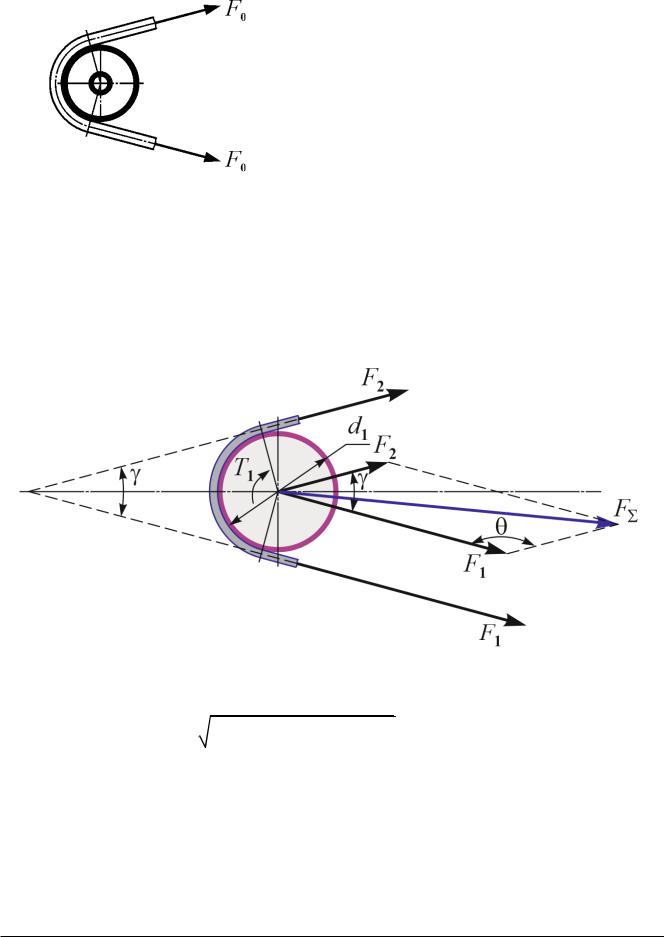
д) Силы, действующие на валы
Ветви ремня не параллельны и натянуты по-разному, поэтому силы в работающей ремённой передаче можно найти по теореме косинусов (рис. 1.10).
Рис. 1.10. Силы в работающей ременной передаче
F 
 F12 F22 2F1F2cos 2F0 cos 2 .
F12 F22 2F1F2cos 2F0 cos 2 .
16
1.5. Расчет ременной передачи
Напряжения в ремне
Напряжения растяжения от сил F1, F2, Fv :
1 FA1 , 2 FA2 , v FAv ,
где A – площадь поперечного сечения.
Напряжения изгиба при огибании шкива могут быть получены из уравнения упругой линии (рис. 1.11):
1r MEIи ,
где Mи – изгибающий момент, E – модуль упругости,
I – момент инерции сечения, r – радиус шкива. Получаем:
Mи |
E I |
и |
и |
Mи / 2 |
|
E |
. |
Рис. 1.11. |
r |
I |
d |
|
|||||
|
|
|
|
|
|
где δ –толщина ремня.
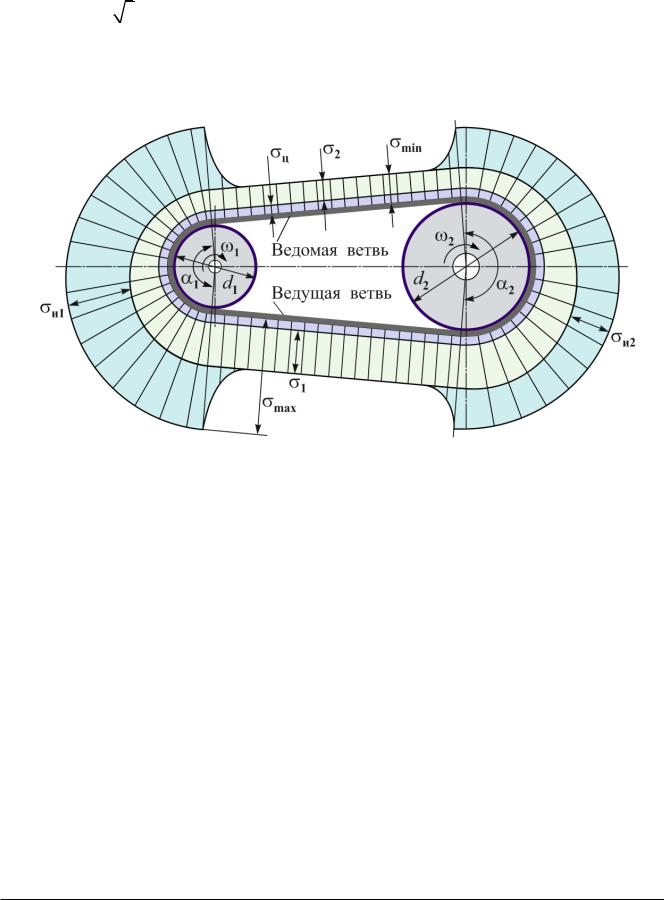
На рис. 1.12, представлено изменение напряжения по длине ремня. Видно, что:
max 1 и1 v .
Это напряжение не должно быть больше предельного значения.
В данной точке ремня напряжение меняется по асимметричному циклу с частотой:
v / l ,
v – скорость и l – длина ремня.
Долговечность ремня определяется из расчета на усталость.
Базовое число циклов N0 берут равным 107, число оборотов ремня за весь срок жизни:
N=2·3600·H0 τ,
где H0 – долговечность. Условие долговечности
17
|
|
1 |
6 |
||
N N0 |
|
|
CiCH , |
||
|
|||||
|
|
max |
|
||
где Ci 1,53 
 i 0,5 – коэффициент, учитывающий передаточное отношение;
i 0,5 – коэффициент, учитывающий передаточное отношение;
CH = 1 для постоянной нагрузки; CH = 2 для переменной нагрузки; σ-1 – предел выносливости.
Рис. 1.12. Напряжения в ремённой передаче
1.6. Скольжение ремня
Упругое скольжение ремня на шкивах вызвано разностью усилий F1, и F2 и относительных удлинений 1 и 2 ремня в ведущей и ведомой ветвях:= 2 – 1. Для плоских ремней = 0,01, для клиновых = 0,02.
На дуге упругого скольжения ремень упруго скользит по шкиву, переходя из состояния 1 к 2 на ведущем шкиве и наоборот - на ведомом шкиве.
Это т.н. функциональное скольжение. Оно приводит к уменьшению передаточного отношения:
i |
1 |
|
d2 |
. |
|
|
|||
|
|
d (1 ) |
||
|
2 |
|
1 |
|
18
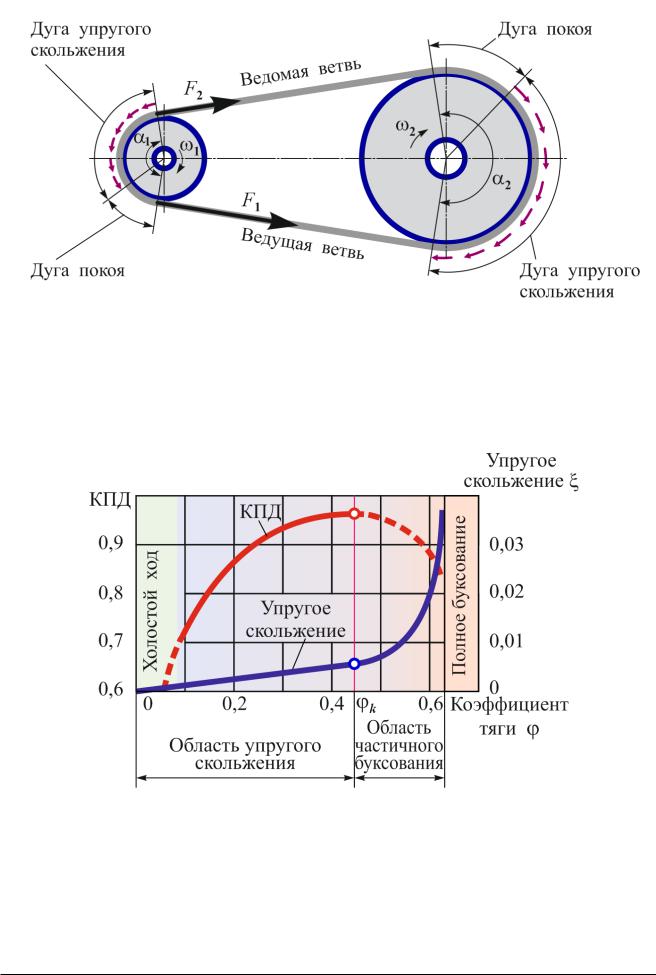
Рис. 1.13. Скольжение в ремённой передаче
Относительное скольжение может быть представлено в зависимости от
коэффициента тяги φ. Эта кривая называется кривая скольжения (рис. 1.14).
Рис. 1.14. Кривые скольжения и КПД
Коэффициент тяги показывает, какая часть силы предварительного натяжения F0 используется эффективно.
|
|
Ft |
|
Ft |
|
1 |
. |
|
|
F |
|
|
|||||
|
F |
|
2F |
|
2 |
0 |
|
|
1 |
2 |
|
0 |
|
|
|
||
|
|
|
19 |
|
|
|
|
|