

09 семестр / Книги и методические указания / Громов - СПЕЦИАЛЬНЫЕ РАЗДЕЛЫ ТЕОРИИ УПРАВЛЕНИЯ
.pdf
|
области их определения, а |
Управляющие |
|
|
|
|
|
|
|
(проектные) |
либо известной функцией (t, x), |
|||||||||||||||||||||||||||||||||||
|
также |
управляющих |
пара- |
параметры |
|
|
|
|
|
|
|
|
|
|
|
|
либо управляющим параметром а. |
|||||||||||||||||||||||||||||
|
метров и возмущений. |
|
|
a = (a , |
a |
2 |
, ..., |
a |
n |
)T , |
|
a Ar Rr ; |
В стохастических задачах w – слу- |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
чайные функции. |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
возмущение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
w = (w , w |
, ..., w )T , |
w W s Rs ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m + r + s = m1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Анализ технических ограни- |
Ограничения типа равенств |
|
Иногда |
ограничения |
представляют |
||||||||||||||||||||||||||||||||||||||||
|
чений на значение управ- |
ψ(t, x) = (ψ1, ψ2 , ..., ψµ)T |
= 0 ; |
в виде: |
u U |
m |
~m |
; |
x X |
n |
|
~ n |
; |
|||||||||||||||||||||||||||||||||
|
|
U |
|
|
X |
r |
||||||||||||||||||||||||||||||||||||||||
|
ляющих |
воздействий, |
фазо- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
a A |
r |
|
~r |
, |
|
где |
|
|
U |
m |
, X |
n |
, A |
– |
||||||||
|
вые координаты и управ- |
k(t, x, u, a) = |
(k1, k2 , ..., kv ) |
= 0 . |
|
A |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
замкнутые ограничения области. |
|
|
||||||||||||||||||||||||||||||||||||||||||
|
ляющие параметры. |
|
|
Ограничения типа неравенств. |
|
|
||||||||||||||||||||||||||||||||||||||||
II |
Выбор |
|
функциональных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обычно u(t) – кусочно-непрерыв- |
||||||||||||||||||||||
|
классов |
для |
управлений |
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ные ограничения функции времени |
|||||||||||||||||||||
|
траекторий. |
|
|
Определение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t, x(t) – непрерывные кусочно- |
|||||||||||||||||||||
|
допустимых |
|
|
траекторий, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гладкие функции времени. |
|
|
|
|
|
||||||||||||||||
|
управлений |
|
и |
управляющих |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
параметров. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Формулировка |
начальных |
и |
Условие типа |
|
|
|
|
|
|
|
|
|
|
|
|
Формируются |
также |
свободные |
|||||||||||||||||||||||||||
|
граничных |
|
условий |
(цели |
g(t |
0 |
,t , x(t |
0 |
), x(t |
|
),a) = |
|
|
|
|
граничные условия |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
эволюции системы). |
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
= (g1, g2 ,..., gl )T |
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
(l ≤ 2n + 2 + r); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
h(t |
0 |
, x(t |
0 |
),a) = (h , h ,..., h |
)T |
= 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
l1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
g(t , x(t ),a) = (g |
1 |
,g |
2 |
,..., g |
l2 |
)T |
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Выбор |
показателя |
оценки |
Различного |
|
рода |
|
|
функционалы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
качества управления, на- |
J[u,a] , определение на решениях |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
правленного |
|
на достижение |
системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
поставленной цели. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Выбор вычислительного опе- |
|
max J[u]; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
ратора (max, min, max min, |
|
u U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
min |
max, …), |
применение |
|
min J[u]; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
которого к показателю каче- |
|
u U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
min max J[u]; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
ства |
является |
математиче- |
u U , t T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
ским |
выражением |
техниче- |
min max J[u, w] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
ского |
понимания |
оптималь- |
u U , w W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
ности |
системы. |
Фиксация |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
аргументов |
этого |
оператора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
(u, a, t и т.д.). Формулировка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
задач оптимизации |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
III |
Корректировка |
технической |
Число переменных, вид уравнений, |
Аналитические трудности, изуче- |
||||||||||||||||||||||||||||||||||||||||||
|
постановки задачи. |
|
|
|
критерий, граничные условия и т.д. |
ние сформулированной модели мо- |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гут заставить пойти на дальнейшие |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
упрощения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Эквивалент |
|
преобразования |
Переход к новым фазовым и (или) |
В частности, использование мето- |
|||||||||||||||||||||||||||||||||||||||||
|
ММ для удобства изменения |
управляющим переменным, гранич- |
дов штрафных функций, редукции к |
|||||||||||||||||||||||||||||||||||||||||||
|
аналитических |
численных |
ным условиям и т.д. |
|
|
|
|
|
|
более простым задачам и т.д. |
|
|
|
|
||||||||||||||||||||||||||||||||
|
методов решения задач оп- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
тимизации. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Изменение ММ для удобства |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Производится на базе содержатель- |
||||||||||||||||||||||||
|
вычислений. |
Формулировка |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ной |
(этап |
I) |
и |
математической |
|||||||||||||||||||
|
понятий «практически опти- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(этап II) формулировок задач |
|
|
|
|
||||||||||||||||||||
|
мальной системы», «практи- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
ческой |
точности |
получения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
результата» |
|
в |
конкретной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
задаче |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор z = (x, t)T , т.е. состояние в момент t, называется событием (фазой). Множество всех возможных событий z образует пространство Z n+1 Rn+1 событий. Точка z Z n+1 является изображающей точкой пространства событий.
2.2. Управление
Система S называется управляемой на отрезке (одно из определений управляемости) [t0 , t1] , если ее поведение при t > t0 зависит только от начального состояния (t = t0 , x0 = x(t0 )) , будущего поведения некоторого переменного вектора u (входа системы)
u = (u1, K, um )T , m ≥1 ,
называемого управляющим вектором (или просто управлением) u, и постоянного вектора a : a = (a1, K, ar )T , r ≥ 0 ,
называемого вектором управляющих (проектных) параметров.
Вектор u принимает значение из некоторого множества U m m-мерного пространства Rm с координатами u1, u2 , ..., um . Это множество может быть всем пространством Rm или его частью U m Rm . U m – чаще всего компактное множество пространства Rm .
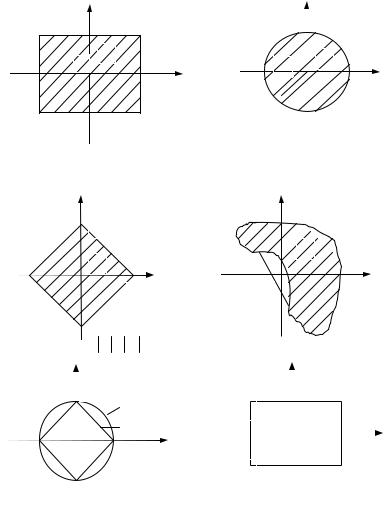
Множество U m называется множеством допустимых значений управления. Некоторые виды множества U m приведе-
ны на рис. 2. Постоянный вектор a обычно принадлежит некоторому замкнутому множеству Ar Rr .
2.3. Эволюция состояния системы. Дифференциальные уравнения движения
Изменение состояния (эволюция) системы S на временном интервале T ={t, t0 ≤ t ≤ t1} часто с хорошей степенью приближения описывается системой обыкновенных дифференциальных уравнений первого порядка:
dx |
= f (t, x,u,a) , |
(1) |
|
dt |
|||
|
|
где |
x = (x , x |
2 |
,..., x |
n |
)T |
– вектор состояния; u = (u ,u |
2 |
,...,u |
m |
)T |
– управляющий вектор; a = (a , a |
2 |
,..., a |
r |
)T |
– вектор проектных |
||||||||||||||||
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||
параметров. |
|
|
|
|
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
u2 |
|
|
u2M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
uR |
u |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
u1m |
|
|
|
|
|
u1M |
|
|
0 |
|
|
|
|
|
u1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
u2m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
U 2 : |
u1m ≤ u1 |
≤ u1M ; |
|
|
|
б) U |
2 :{u |
2 |
+u2 |
≤ u2 |
} |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u2m ≤ u2 |
≤ u2M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u2 |
|
|
|
|
u1 |
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
uM |
|
|
|
|
|
|
0 |
|
|
|
|
|
u1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
в) U 2 :{u + u |
2 |
≤ u |
M |
} |
|
|
г) U 2 :{ f (u ,u |
2 |
) ≤ 0} |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
u2 |
|
|
|
|
|
|
|
|
|
|
|
|
u2 |
|
|
|
|
|
|
|||
|
|
|
|
uR |
|
|
|
|
|
|
|
|
|
|
u2M |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
u2 |
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u1M |
|
|
|
u1M |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
u22 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0 |
|
|
|
|
uR |
|
|
u1 |
3 |
|
|
|
|
|
4 |
u1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u2M |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2 |
+u |
2 |
= u |
2 |
|
|
|
|
(u |
,u |
|
), (u |
,u |
|
); |
|||||||
д) |
U 2 |
u |
|
|
|
|
|
|
; |
|
е) |
U 2 |
|
|
||||||||||||
: |
1 |
|
|
2 |
|
|
R |
|
|
: |
1M |
|
2M |
1m |
|
2M |
|
|
||||||||
|
|
|
u |
+ |
u |
|
= u |
|
|
|
|
|
|
(u1M ,u2m ),(u1M |
,u2m ) |
|
||||||||||
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|||
Рис. 2. Виды множества U2 допустимых управлений:
а – в – замкнутые ограничения выпуклые области, содержащие начало координат; г – невыпуклая область, не содержащая начало координат; д – невыпуклые одномерные области U12 , U 22 ; е – дискретное множество допустимых значений (1 – 4 изолированные точки)

Система (1) образует существенную часть математической модели динамической системы S. В ММ, описываемой сис-
темой ДУ, формальным признаком переменной состояния x является наличие ее производной ddtx в левой части системы (1).
Управляющая переменная u входит только в правую часть системы (1) и не встречается под знаком производной (это формальный признак управляющей переменной).
Предполагается, что вектор-функция f(t, x, u, a) определена для любых значений x X n , u U m , a Ar , t T , непре-
рывна по совокупности переменных t, x, u, a и непрерывно дифференцируема по x, a. Хотя гладкость является достаточно жестким требованием и может быть заменена требованием измеримости и ограниченности. Так как поведение вектора u мо-
жет быть произвольным (за исключением условия u U m ) и, кроме того, можно произвольно выбрать постоянный вектор a Ar , то система уравнений (1) определяет управляемый процесс. Ход управляемого процесса будет определен на некотором интервале t0 ≤ t ≤ t1 , если на этом интервале вектор u задан в одной из двух форм:
u = u(t) = (u (t), u |
2 |
(t), ..., u |
m |
(t))T ; |
(2) |
||||
1 |
|
|
|
|
|
|
|
||
u = v(x,t) = (v (x,t), v |
2 |
(x,t), ..., v |
m |
(x,t))T . |
(3) |
||||
1 |
|
|
|
|
|
|
|
||
Вектор-функцию u(t) называют программным (временным) управлением, а вектор-функцию v(x, t) – координатным управлением или законом управления. Закон управления (3) физически выражает известный принцип обратной связи, согласно которому величина управляющего воздействия определяется на основании измерения текущего состояния системы x и, быть может, момента времени t.
Каждому выбору векторов управляющих параметров a и управления u (вида (2), (3)) и каждому начальному состоянию (t0 , x0 ) соответствует по (1) временная последовательность состояний x(t, x0 , t0 ) , которая называется фазовой траектори-
ей (поведением, эволюцией, движением) системы S. Пара вектор-функций {u(t), x(t)} или {v(x, t), x(t)} называется про-
цессом управления или режимом.
2.4. Функционал. Критерий качества управления
Величина J[u(t)] называется функционалом функции u(t) на отрезке t0 ≤ t ≤ t1 , если каждой функции u(t), t [t0 , t1] ,
принадлежащей |
некоторому |
классу |
функций, |
поставлено |
в |
соответствие |
определенное |
число |
t |
|
|
|
|
|
|
|
|
( f (a), f ′(x), ∫ f (t)dt, max f (t) и т.д.) из R. |
|
0 |
t0 ≤t≤t |
|
|
Таким образом, функционал J[u(t)] – это отображение, в котором роль независимого переменного (функционального аргумента) играет функция u(t). При этом J[u(t)] зависит от совокупности всех значений, принимаемых функцией u(t) на отрезке [t0 , t1] , и может рассматриваться как функция бесконечного числа независимых переменных.
Для каждого фиксированного конечного момента времени t1 = t1′ состояние x(t1′) системы S, движущейся из начального состояния (t0 , x0 ) в соответствии с уравнением (1), является одновременно векторным функционалом (т.е. вектором, ком-
понентами которого являются функционалы) от управления u(t) и вектор-функцией от вектора a и вектора начальных условий x0 (t0 ) . Критерии качества процессов управления являются функционалами.
Достаточно общая форма критерия качества в ТОП имеет вид
t1 |
|
J[u(t),a] = Φ(t0 ,t1, x0 , x1,a) + ∫ f0 (t, x(t),u(t),a)dt , |
(4) |
t0
где x(t) удовлетворяет системе (1); u(t) – некоторое выбранное управление; а – управляющий параметр. В частности, каждую из координат xi (t) системы (1) можно записать в форме
t1
xi (t) = ∫ fi (t, xi (t),u(t), a) + xi (t0 ), i =1, n .
t0
2.5. Автономные системы
Если правые части (1) и функции Φ и f0 в (4) от времени явно не зависят, то соответствующая задача называется авто-
номной:
ddxt = f (x,u,a) ;
t1
J[u(t),a] = Φ(x0 ,x1,a) + ∫ f0 (x,u,a)dt .
t0
Автономные системы инвариантны относительно сдвига вдоль оси t, поэтому для автономных систем важна только длительность процесса t1 −t0 и можно положить t0 = 0 .
2.6. Допустимое программное управление
Вектор-функция u(t) называется допустимым программным управлением в задаче, если:
а) u(t) принадлежит к выбранному классу в большинстве практических приложений кусочно-непрерывных по t на интервале [t0 , t1] функций, т.е. может иметь лишь конечное число точек разрыва первого рода;
б) значения u(t) принадлежат заданному множеству U m для всех t [t0 , t1 ] .
Кусочно-непрерывные управления соответствуют предположению о «безынерционности».
Если желательно учесть «инерцию», то следует искать управление в классе непрерывных кусочно-гладких функций u(t). Такой класс допустимых управлений иногда сводится к предыдущему путем введения нового безынерционного управления u(t) , связанного со «старым» управлением u(t) соотношением
du |
= u, u U m , |
|
dt |
||
|
где u = (u1,u2 ,...,um )T ;
u = ( |
u |
, |
u |
2 |
,..., |
u |
m |
)T . |
(5) |
1 |
|
|
|
|
|
||||
Если U m – замкнутая и ограниченная область, то это означает, что введены ограничения на значения первых производных от вектор-функции u(t).
Кусочно-непрерывным функциям u(t) отвечают кусочно-гладкие функции u(t) в силу (5). Таким образом, в новой задаче u(t) становится переменной состояния, управляемой посредством u(t) через систему (5).
Если условие u U m в новой задаче можно снять, то задача сводится к предыдущей для кусочно-непрерывного управ-
ления u U m . В противном случае следует обратиться к задаче оптимизации с ограничениями на фазовые координаты. На рис. 3 приведены примеры управлений, принадлежащих как к классу кусочно-непрерывных функций, так и к другим классам.
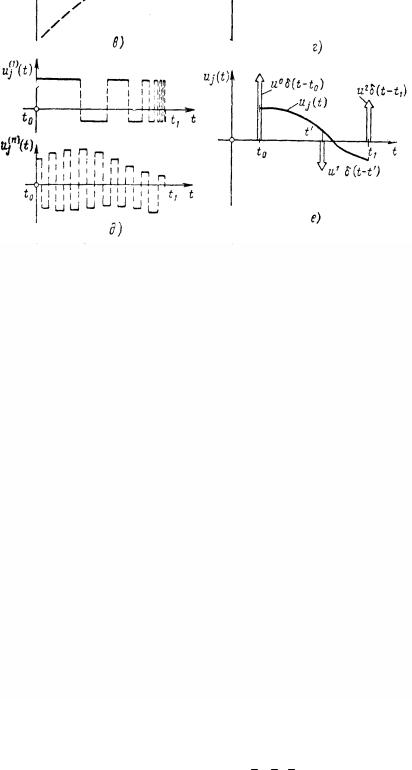
Рассмотрение допустимых управлений в классе кусочно-непрерывных функций объясняется тем, что для оптимизации функционалов на этом классе функций разработан соответствующий математический аппарат – принцип максимума.
Рис. 3. Примеры управлений uj (t), принадлежащих различным классам функций:
а – гладкое управление; б – кусочно-гладкое непрерывное управление; в – непрерывное управление (в окрестности uj (t), t недифференцируема); г – кусочно-непрерывное управление; д – управление, не являющееся кусочно-непрерывным (u'j содержит бесконечное число
переключений в окрестности t1; u2j (t) – элемент последовательности, сходящейся к функции, разрывной в каждой точке [t0, t1]); е – управ-
ление, содержащее δ-функции Дирака; u 0 , u1, u2 – константы
Для каждого допустимого управления u(t) в силу сделанных предположений относительно f(t, x, u) существует единственное абсолютно-непрерывное решение системы x(t) = x(t,x0 ,t0 ) , которое удовлетворяет системе (1) почти всюду на
[t0 , t1] [т.е. за исключением конечного числа или счетного множества точек разрыва функции u(t)] и при t = t0 принимает заданное значение x0 = x(t0 ) .
2.7. Допустимый закон управления
Закон управления v(x, t) является допустимым на x X n , t [t0 , t1 ] , если
1)v(x, t) U m , t T =[t0 ,t1], x X n ;
2)v(x(t),t) = u(t) ,
где x(t) – траектория системы S; u(t) – допустимое программное управление при законе управления v(x, t).
Вектор а управляющих параметров называется допустимым, если его значение принадлежит заданному множеству
Ar Rr .
2.8. Допустимые траектории и процессы
Фазовая траектория x(t) системы S называется допустимой, если:
а) она получена из решения системы ДУ при допустимом управлении u(t) или при допустимом законе управления v(x,
t);
б) значения x(t) принадлежат заданной области X n пространства состояний X n .
Управляемый процесс (x, u) называется допустимым, если в нем под действием допустимого управления u(t) или допустимого закона управления v(x, t) реализуется допустимая траектория.
2.9. Граничные условия. Краевая задача
Цель управляемого процесса (x, u) состоит в переходе системы S из некоторого заданного при t = t0 начального состояния x0 = x(t0 ) в заданное конечное состояние x1 = x(t1) за время T = t1 −t0 .
При этом все компоненты векторов x0 , x1 и моменты времени t0 , t1 обязательно должны быть фиксированными, неко-
торые могут оставаться незаданными (свободными). В общем случае система S в начальный и конечный моменты времени может находиться в состояниях, описываемых уравнениями вида
|
|
а) |
б) |
|
|
|
|
в) |
г) |
|
|
д) |
е) |
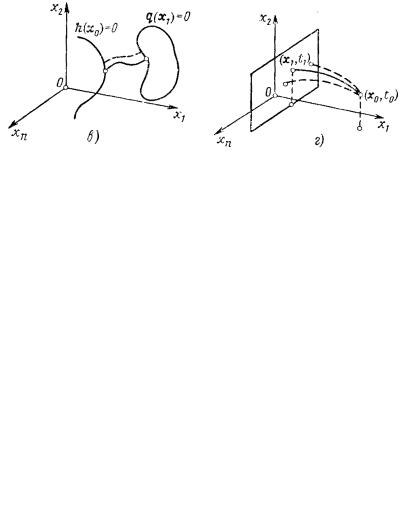
Рис. 4. Примеры граничных условий:
a – левый и правый концы фазовой траектории закреплены;
б – левый конец закреплен, правый – свободен; в – левый и правый концы подвижные; г – левый конец закреплен, правый – свободен, за исключением координаты x1; д – общий случай подвижных граничных условий;
е– граничные условия в задаче встречи движений;
–оптимальная траектория; - - - - - - – произвольная траектория
|
|
h(t |
0 |
, x |
0 |
,a) = (h ,h ,...,h )T |
= 0 ; |
(6) |
||||||
|
|
|
|
|
1 |
2 |
|
l |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
g(t ,x ,a) = (h , h ,...,h )T |
= 0 |
|
(7) |
|||||||||
|
|
|
1 |
|
1 |
1 |
2 |
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
или более общими уравнениями вида |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g(t |
0 |
,t , x |
0 |
, x ,a) = (g , g |
2 |
,..., g |
l |
)T |
= 0 , |
(8) |
||||
|
1 |
|
|
|
1 |
1 |
|
|
|
|
||||
где l1 +l2 ≤ 2n + 2 + r; l ≤ 2n + 2 + r .
Уравнения (6) и (7) описывают (при фиксированном управляющем параметре а) обычно поверхность размерности (n +1−l2 ) и (n +1−l1) , и (u −l2 ) в пространстве (t, x) называются раздельными граничными условиями для концов фазовой
траектории. Примеры граничных условий приведены на рис. 4. Уравнения (8) называются смешанными граничными условиями. Если значения фазовых координат в момент t0 (или t1) не фиксируются, то граничные условия для левого (или правого) конца траектории называются свободными. Раздельные условия вида (6) и (7) часто называют подвижными граничными условиями.
Определение уравнений u(t), при которых решение системы (1) удовлетворяет условиям (6) и (7), называется двухто-
чечной краевой задачей.
Перевод начального состояния x0 в конечное состояние x1 на заданном отрезке [t0, t1] не всегда возможен. Однако, если найдется хотя бы одна пара векторов {u(t), a} или {v(x, t), a}, осуществляющая указанный переход, то обычно существуют и другие пары векторов, реализующие этот же самый переход. В этом случае каждой паре {u(t), a} соответствует определенное значение критерия качества J[u, a]. Можно ставить задачу об отыскании таких {u(t), a}, которые минимизируют или максимизируют этот критерий.
Контрольные вопросы
1.Что такое фазовые координаты?
2.Расскажите об эволюции системы и ее описании при помощи дифференциальных уравнений движения.
3.Функционал. Критерий качества управления.
4.Какие системы называются автономными?
5.Расскажите о допустимых программных управлениях.
6.Расскажите о допустимом законе управления.
7.Допустимые траектории и процессы. Граничные условия. Краевая задача. Виды краевых условий.
Глава 3
ПОСТАНОВКА ОСНОВНЫХ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Основная задача оптимального программного управления в форме временной программы (2) для системы (1) с критерием (4) и краевыми условиями (8) формулируется следующим образом.
Среди всех допустимых на отрезке [t0 , t1] программных управлений u = u(t) U m и управляющих параметров a Ar , переводящих точку (t0, x0 ) в точку (t1, x1) , найти такие, для которых функционал (4) на решениях системы (1) примет наи-
меньшее (наибольшее) значение с выполнением условий (8).
Управление u(t), решающее эту задачу, называется оптимальным (программным) управлением, а вектор а – оптимальным параметром.
Если пара {u*(t), a*} доставляет абсолютный минимум функционалу J[u(t), a] на решениях системы (1), то выполняется
соотношение
Jmin = J * = J[u* (t), a* ] ≤ J[u(t), t] |
(9) |
для u U m , a Ar , являющихся допустимыми и осуществляющих заданный переход с выполнением условия (8). Анало-
гичное определение имеет место для абсолютного максимума (с заменой знака неравенства ≤ знаком ≥).
Из определения абсолютного минимума (9) следует, что абсолютное минимальное значение функционала J * = J[u* , a* ] является единственным, чего нельзя утверждать, вообще говоря об оптимальном управлении u*(t) и оптимальном параметре a*.
3.1. Основная задача оптимального координатного управления
Основная задача оптимального координатного управления известна в теории оптимальных процессов как проблема синтеза оптимального закона управления, а в некоторых задачах – как задача об оптимальном законе поведения.
Задача синтеза оптимального закона управления для системы (1) с критерием (4) и краевыми условиями (6) и (7), где для упрощения предполагается, что функции f0, f, h, g, Φ от вектора а не зависят, формулируется следующим образом.
Среди всех допустимых законов управления v(x, t) найти такой, что для любых начальных условий (t0, x0) из (6) при подстановке этого закона в (1) и в (4) осуществляется заданный переход (7) и критерий качества J[u] принимает наименьшее (наибольшее) решение.
3.2. Оптимальные траектории
Траектория системы (1), соответствующая оптимальному управлению u*(t) или оптимальному закону v*(x, t), называется оптимальной траекторией. Совокупность оптимальных траекторий x*(t) и оптимального управления u*(t) образует оптимальный управляемый процесс {x*(t), u*(t)}.
Установлено, что при отсутствии вектора а управляющих параметров в f0, f, h, g, Φ задача программного и координатного управления эквивалентны.
Так как закон оптимального управления v*(x, t) имеет форму закона управления с обратной связью, то он остается оптимальным для любых значений начальных условий (x0, t0) и любых координат x.
В отличие от закона v*(x, t) программное оптимальное управление u*(t) является оптимальным лишь для тех начальных условий, для которых оно было вычислено. При изменении начальных условий будет меняться и функция u*(t). В этом состоит важное, с точки зрения практической реализации системы управления, отличие закона оптимального управления v*(x, t) от программного оптимального управления u*(t), поскольку выбор начальных условий на практике никогда не может быть сделан абсолютно точно.
3.3.Свойства оптимальных управлений
иоптимальных траекторий
1.Всякая часть оптимальной траектории (оптимального управления) также, в свою очередь, является оптимальной траекторией (оптимальным управлением). Это свойство математически формулируется следующим образом.
Пусть u*(t), t0 ≤ t ≤ t1 – оптимальное управление для выбранного функционала J[u], соответствующее переходу из со-
стояния (t |
0 |
, x |
0 |
) |
в состояние (t , x ) |
по оптимальной траектории x*(t). Числа t |
0 |
, t и вектор x |
0 |
– фиксированные, а вектор |
|||
|
|
|
1 |
1 |
|
1 |
|
|
|
||||
x , вообще говоря, свободен. На оптимальной траектории x*(t) выбираются точки x* (τ |
0 |
) и x* (τ ) , соответствующие мо- |
|||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
ментам времени t = τ0 , t = τ1 , где t0 ≤ τ0 ≤ τ1 ≤ t1 . Тогда управление u*(t) на отрезке [τ0 , τ1 ] является оптимальным, соответствующим переходу из состояния x* (τ0 ) в состояние x* (τ1) , а дуга [x* (τ0 ), x* (τ1)] является оптимальной траекторией S.
Таким образом, если начальное состояние системы есть x* (τ0 ) и начальный момент времени t = τ0 , то независимо от
того, каким образом пришла система к этому состоянию, ее оптимальным последующим движением будет дуга траектории x*(t), τ0 ≤ t ≤ τ1 , являющейся частью оптимальной траектории между точками (t0 , x0 ) и (t1, x1) . Это условие является необ-
ходимым и достаточным свойством оптимальности процесса и служит основой динамического программирования.
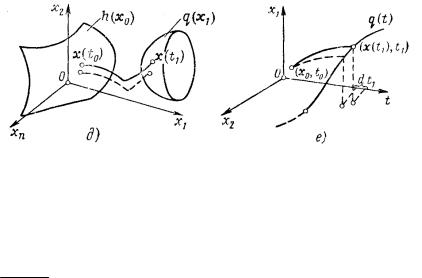
Примечание. Приведенная краткая формулировка основного свойства оптимальных траекторий не должна толковаться слишком широко. Требование, чтобы начальная и конечная точки траекторий сравнения лежали на оптимальной траектории в те же моменты времени τ0 , τ1 , что и точки оптимальной траектории, или чтобы свободный правый конец x1′ тра-
ектории сравнения оканчивался в тот же момент t1 , что и конец оптимальной траектории, являются существенными. Без их выполнения это свойство, вообще говоря, не имеет места. Так, если заданы только начальная точка x0 = x(t0 ) и моменты времени t0 и τ0 , а x(τ0 ) свободен, то отрезок траектории x*(t), t0 ≤ t ≤ τ0 может и не быть оптимальным. В этом случае оптимальным может быть, вообще говоря, другой отрезок x′(t) (рис. 5).
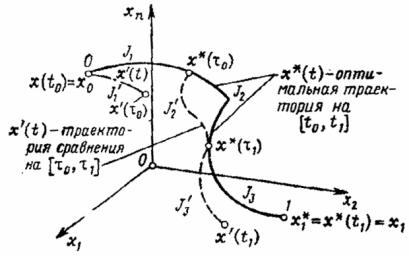
Рис. 5. Основное свойство оптимальных траекторий:
J2′ > J2 ; J1, J1′ (i =1, 2, 3) – значения функционала на участках оптимальной траектории и на траекториях сравнения, соответственно
2. Автономные системы инвариантны относительно сдвига вдоль оси t. Это означает, что если u*(t), t |
0 |
≤ t ≤ t соверша- |
||||||||
|
|
|
|
|
|
|
|
|
1 |
|
ет переход x |
0 |
→ x |
и сообщает функционалу |
J[u] |
значение J*, то при любом действительном |
τ управление |
||||
|
|
|
1 |
|
|
|
|
|
|
|
u* (t + τ), t |
0 |
−τ ≤ t ≤ t |
−τ также совершает переход x |
0 |
→ x и придает функционалу J[u] значение J*. |
|
|
|||
|
|
|
1 |
|
|
1 |
|
|
||
3.4. Геометрическая интерпретация основной задачи оптимального управления
Основным задачам оптимального управления при закрепленных концах можно дать следующую эквивалентную гео-
метрическую формулировку. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Пусть при t = t0 |
задано начальное состояние x0 = x(t0 ) , а при t = t1 – конечное состояние x1 = x(t1) , где t0 , t1, x0 , x1 – |
|||||||||||||||||
фиксированные значения. Тогда в функционале J[u] (4) слагаемое Φ(t0 , t1, x0 , x1) является известным числом Φ0 . |
|
|
|
|
||||||||||||||
Введем новую переменную x0, закон изменения которой имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
dx0 |
= f0 (t, x, u, a) |
|
|
|
|
|
|
|
|
|
(10) |
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с начальным условием |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x0 (t0 ) = x00 = Φ0 . |
|
|
|
|
|
|
|
|
|
|
|
|||
Присоединим эту переменную к системе (1). Тогда при t = t |
0 |
система находится в точке (x |
0 |
(t |
0 |
), x (t |
0 |
), ..., x |
n |
(t |
0 |
))T , а |
||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||
при t = t – в точке (x |
0 |
(t ), x (t ), ..., x |
n |
(t ))T , где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 1 1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
t1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x0 (t1 ) = Φ0 + ∫ f0 (t, x, u, a)dt = J[u] . |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
t0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, если в (n + 1)-мерном пространстве точек (x0 ,x) провести через точку (0, x1) прямую П параллельно оси 0x0 , то решение системы (1), (10) проходит при t = t1 через точку на прямой П с координатой x0 (t1) = J .
Теперь основная задача оптимального программного управления формулируется геометрически как на рис. 6.

Рис. 6. Геометрическая формулировка основной задачи оптимального управления:
1 – оптимальная траектория; 1' – изменение критерия качества J вдоль
оптимальной траектории; 2, 3 – неоптимальные траектории, проходящие через точки (x0, t0), (x1, t1); 2', 3' – изменение критерия качества J вдоль неоптимальных траекторий
В (n + 1)-мерном фазовом пространстве (x0 , x1, ..., xn )T даны:
1)при t = t0 точка (Φ0 , x0 ) ;
2)прямая П, параллельная оси 0x0 и проходящая через точку (0, x1) .
Среди всех допустимых программных управлений u = u(t), обладающих тем свойством, что соответствующее решение (x0 (t), x(t)) системы (1), (10) с начальным условием (Φ0 , x1 (t0 ), ..., xn (t0 ))T пересекает при t =t1 прямую П, найти такое, для которого точка пересечения с прямой П имеет наименьшую (наибольшую) координату x0 (t1) = J .
Контрольные вопросы
1.Основная задача оптимального координатного управления.
2.Оптимальные траектории.
3.Основные свойства оптимальных управлений и оптимальных траекторий.
4.Геометрическая интерпретация основной задачи.
Глава 4
НЕОБХОДИМЫЕ УСЛОВИЯ ОПТИМАЛЬНОСТИ ДЛЯ ОСНОВНОЙ ЗАДАЧИ ПРОГРАММНОГО УПРАВЛЕНИЯ.
ПРИНЦИП МАКСИМУМА
4.1. Краткая формулировка задачи
Пусть даны:
• система дифференциальных уравнений движения
|
|
|
|
|
|
|
dx |
= f (t, x,u,a) , |
(11) |
|||||
|
|
|
|
|
|
|
dt |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где f (t,x,u,a) определены для всех x = (x1, x2 , ..., xn ) |
T |
~ n |
R |
n |
, |
t0 ≤ t ≤ t1, u U |
m |
, a A |
r |
, непрерывны по совокупности |
||||
|
X |
|
|
|
|
|
||||||||
переменных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t, x, u, a) и непрерывно дифференцируемы по (x, a); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• соотношения, которым удовлетворяют начальные (t0 , x0 ) и конечные (t1, x1) |
|
фазы движения системы (11): |
|
|||||||||||
|
|
|
|
|
|
g j (t0 ,t1, x0 , x1,a) = 0 ( j =1, 2, ..., l < 2n + 2 + r) , |
(12) |
|||||||
где функции g j непрерывно дифференцируемы по всем своим аргументам;
• критерий качества управления (функционал)
t2 |
|
J[u(t),a] = Φ(t0 ,t1, x0 , x1,a) + ∫ f0 (t, x,u,a)dt , |
(13) |
t1 |
|
где Φ, f0 обладают всеми необходимыми производными.
Множество U m представляет собой замкнутую и ограниченную область евклидова m-мерного пространства Rm . Функ-

ция u(t) считается допустимой, если она кусочно-непрерывна и ее значения принадлежат множеству U m : u(t) U m , т.е. та-
кие управления ui(t), каждое из которых непрерывно для всех рассматриваемых t, за исключением лишь конечного числа моментов времени, где функция ui (t) может терпеть разрывы первого рода. Во избежание недоразумений отметим, что, по определению разрывов первого рода, в точке разрыва τ предполагается существование конечных пределов:
u(τ−0) = limu(t), |
u(τ+0) = limu(t) . |
|
|
|
|
|
t→τ |
t→τ |
|
|
|
|
|
t<τ |
t>τ |
|
|
|
|
|
4.2. Некоторые вспомогательные построения и терминология |
|
|
|
|||
Вводятся: |
|
|
|
|
|
|
• зависящий от времени вектор сопряженных координат (вектор-функция множителей Лагранжа) |
|
|||||
|
λ(t) = (λ0 (t), λ1(t), ..., λn (t))T ; |
(14) |
||||
• постоянный вектор µ : |
|
|
|
|
|
|
|
µ = (µ , µ |
2 |
, ..., µ |
l |
)T ; |
(15) |
|
1 |
|
|
|
||
• вспомогательные функции (гамильтониан задачи оптимизации и функция Лагранжа)
|
|
|
n |
|
|
|
|
H (t,x,u, λ,a) = ∑λi fi (t,x,u,a) +λ0 f0 (t,x,u,a) |
(16) |
||||||
и |
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
l |
|
|
|
|
|
L(t0 ,t1,x0 , x1,a,µ) = ∑µj g j (t0 ,t1, x0 ,x1,a) +λ0Φ(t0 ,t1,x0 ,x1,a) ; |
(17) |
||||||
|
|
j=1 |
|
|
|
|
|
• система дифференциальных уравнений, сопряженная к (11) (13) и определяющая изменение вектора λ(t) , |
|
||||||
|
dλi |
= − ∂H |
n |
∂fk (t, x,u,a) (i = |
|
|
|
|
= −∑λk |
|
) . |
(18) |
|||
|
0, n |
||||||
|
dt |
||||||
|
∂xi |
k =0 |
∂xi |
|
|||
Замечание. Система линейных дифференциальных уравнений y = B(t)y |
называется сопряженной для системы x = |
||||||
& |
|
|
|
|
|
& |
|
A(t)x + f(t), если B(t) = −AT (t) и размерность векторов x и y (а также матриц B(t) и A(t)) одинаковы. Таким образом, система (18) является фактически сопряженной к линеаризованной системе (11), (20):
& |
∂f |
|
|
δx + |
∂f |
|
|
δu(t) , |
|
|
|||||||
δx = |
∂x |
|
x)((t), u)(t) |
∂u |
|
x)(t), u)(t) |
||
|
|
|
|
|
где xˆ(t), uˆ (t) – некоторая опорная траектория и опорное управление, соответственно. С помощью функции H исходная система уравнений (1) записывается в виде
dxi |
= |
∂H |
= fi (t, x,u,a) (i = |
|
) . |
|
0, n |
||||||
dt |
|
|||||
|
∂λi |
|||||
Индексу i = 0 соответствует новая переменная x0 (t) , определяемая скалярным уравнением
dxdt0 = f0 (t, x, u, a) ,
с начальным условием
(19)
(20)
x0 (t0 ) = x00 = Φ(t0 , t1, x0 , x1, a) .
Система уравнений
& |
|
∂H T |
|
~ |
|
|
|
||
x = |
|
|
|
= f ; |
|
|
|
||
|
|
∂λ |
|
|
|
|
|
|
|
|
|
|
|
T |
|
~ |
T |
|
|
|
|
∂H |
|
∂f |
|
|
|||
& |
|
|
|
|
|
|
|
|
λ, |
λ = − |
~ |
|
= − |
~ |
|
||||
|
|
|
∂x |
|
|
|
∂x |
|
|
(21)
(22)
где |
H = λ |
T ~ ~ |
|
~ |
= (x0 |
~ |
~ n+1 |
, называется канонической системой |
|||
f , ∂f ∂x – матрица Якоби, x |
, x1, ..., xn ) , f = ( f0 , f1, ..., fn ) ; x X |
||||||||||
дифференциальных уравнений, связанной с основной задачей. |
|
|
|
|
|||||||
|
|
|
|
4.3. Принцип максимума Л.С. Понтрягина |
|
|
|
||||
|
Пусть u* (t) = (u* (t), ...,u* (t))T , |
t [t |
0 |
, t ] |
– такое допустимое управление, а |
a* = (a* , a* , ..., a* )T |
– такое допустимое |
||||
|
|
1 |
m |
|
1 |
|
|
1 2 |
r |
|
|
значение вектора параметров, что соответствующая им траектория x*(t) системы (11) удовлетворяет условиям (12) для концов.
Для оптимальности (в смысле минимума) критерия качества (13) управления u*(t), траектории x*(t) и вектора управ-