

08 семестр / Разное / Скамко / inform / fujitsu
.pdfЭЛЕМЕНТНАЯ БАЗА: микроконтроллеры
УПРАВЛЕНИЕ ШАГОВЫМ ДВИГАТЕЛЕМ C ПОМОЩЬЮ МИКРОКОНТРОЛЛЕРА FUJITSU MB90F598
Дмитрий Киселев, разработчик «КТЦ МК»
Шаговые двигатели широко используются в принтерах, автома/ |
обмотки с центральными отводами или |
||||||||
без них (см. рис. 1a). Биполярные ша- |
|||||||||
тических инструментах, приводах дисководов, автомобильных при/ |
|||||||||
говые двигатели с постоянными магни- |
|||||||||
борных панелях и других приложениях, требующих высокой точнос/ |
|||||||||
тами и гибридные двигатели проще |
|||||||||
ти позиционирования и микропроцессорного управления. Для тако/ |
|||||||||
униполярных, и их обмотки не имеют |
|||||||||
го управления используется специальная логика и высокоточные |
центрального отвода (см. рис. 1б). |
||||||||
драйверы, реализуемые на дискретной элементной базе, что увели/ |
Такое упрощение приводит к бо- |
||||||||
чивает сложность схемы и ее стоимость. |
лее сложному реверсированию поляр- |
||||||||
Для упрощения разработки и уменьшения стоимости изделия |
ности каждой пары полюсов мотора. |
||||||||
предлагается контроллер шагового двигателя, интегрированный в не/ |
Шаговые двигатели имеют широкий |
||||||||
дорогой процессор Fujitsu MB90F598. Подобным контроллером обла/ |
диапазон угловых разрешений. Более |
||||||||
«грубые» моторы обычно поворачива- |
|||||||||
дают многие процессоры семейства F2MC/16LX, например MB90F428, |
|||||||||
ются на 90° за шаг, а разрешение пре- |
|||||||||
что позволяет выбирать контроллер с нужной периферией. |
|||||||||
цизионных может достигать 1,8° или |
|||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
0,72° на шаг. Если контроллер позволя- |
||
Небольшие |
шаговые |
двигатели |
нию. Цикличность позиционирования |
ет, то возможно использование полу- |
|||||
часто используются в автомобильных |
ротора зависит от его геометрии. |
шагового режима или режима с более |
|||||||
приборных панелях (инструменталь- |
Различают шаговые и серводвига- |
мелким дроблением шага (микрошаго- |
|||||||
ных кластерах), управляя стрелками |
тели. Принципы их действия похожи, |
вый режим), при этом на обмотки по- |
|||||||
спидометра, |
тахометра, |
указателя |
и многие контроллеры могут работать |
даются дробные значения напряжений, |
|||||
температуры охлаждающей жидкости |
с обоими типами двигателей. Основ- |
зачастую формируемые при помощи |
|||||||
и уровня топлива. По сравнению с |
ное отличие заключается в количестве |
широтно-импульсной модуляции. |
|||||||
традиционно |
используемыми гальва- |
шагов на цикл (один оборот ротора). |
Если в процессе управления возбуж- |
||||||
нометрическими системами при этом |
Серводвигатели требуют наличия в |
дается только одна обмотка в любой мо- |
|||||||
отсутствует вибрация стрелок и уве- |
системе управления аналоговой об- |
мент времени, то ротор поворачивает на |
|||||||
личивается точность показаний. Один |
ратной связи, в качестве которой |
фиксированный угол, который удержи- |
|||||||
процессор MB90F598 способен обслу- |
обычно используется потенциометр. |
вается до тех пор, пока внешний мо- |
|||||||
живать четыре независимых шаговых |
В этом случае величина тока обратно |
мент не превысит момента удержания |
|||||||
двигателя, которые подключаются не- |
пропорциональна разности углов же- |
двигателя в точке равновесия. |
|||||||
посредственно к нему без дополни- |
лаемого и текущего положений. Ша- |
Для правильного управления бипо- |
|||||||
тельных интерфейсных схем. |
|
говые двигатели преимущественно ис- |
лярным шаговым двигателем необхо- |
||||||
Шаговые двигатели: принцип |
|
пользуются в системах без обратных |
дима электрическая схема, выполняю- |
||||||
|
связей, требующих небольших уско- |
щая функции старта, стопа, реверса и |
|||||||
действия и отличия от двигателей |
рений при движении. |
изменения скорости. Шаговый двига- |
|||||||
постоянного тока |
|
|
Шаговые двигатели (ШД) делятся |
тель преобразует последовательность |
|||||
Двигатели |
|
постоянного |
òîêà |
на два типа: двигатели с постоянными |
цифровых сигналов |
переключения в |
|||
(ДПТ) начинают работать, как только |
магнитами и двигатели с переменным |
движение. «Вращающееся» магнитное |
|||||||
на них подается постоянное напряже- |
магнитным сопротивлением (гибрид- |
поле обеспечивается |
соответствующи- |
||||||
ние. Переключение направления тока |
ные двигатели). С точки зрения управ- |
ми переключениями |
напряжений на |
||||||
через обмотки ротора осуществляется |
ления (контроллера) они не различа- |
обмотках. Вслед за этим полем дви- |
|||||||
механическим коммутатором – кол- |
ются. Двигатели с постоянными магни- |
жется ротор, соединенный редуктором |
|||||||
лектором. При этом постоянные маг- |
тами обычно имеют две независимые |
с выходным валом двигателя. |
|||||||
ниты расположены на статоре. Шаго- |
|
|
|
|
|||||
вый двигатель может быть рассмот- |
|
|
|
|
|||||
рен как ДПТ без коммутатора. Его |
|
|
|
|
|||||
|
|
|
|
||||||
обмотки – часть статора. На роторе |
|
|
|
|
|||||
расположен постоянный магнит или, |
|
|
|
|
|||||
|
|
|
|
||||||
для случаев с переменным магнитным |
|
|
|
|
|||||
сопротивлением, |
зубчатый |
áëîê èç |
|
|
|
|
|||
магнитомягкого материала. Все ком- |
|
|
|
|
|||||
|
|
|
|
||||||
мутации производятся внешними схе- |
|
|
|
|
|||||
мами. Обычно система «мотор – |
|
|
|
|
|||||
контроллер» |
разрабатывается |
òàê, |
|
|
|
|
|||
чтобы обеспечивать вывод ротора в |
|
|
|
|
|||||
любую фиксированную позицию – то |
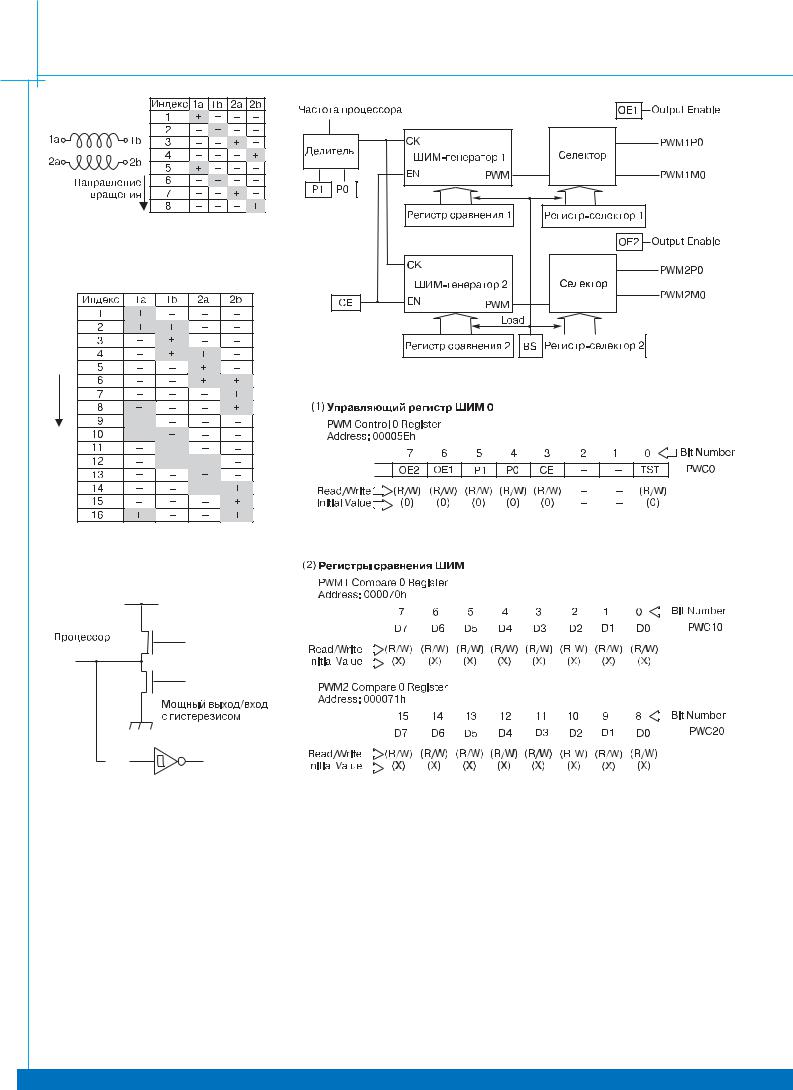
Рис. 1. Типы шаговых двигателей: a – униполярный ШД с постоянными магнитами, |
||||||||
есть, система управляется по положе- |
б – биполярный и гибридный ШД |
|
|
||||||
«Электронные компоненты» ¹7’ 2002
89
ЭЛЕМЕНТНАЯ БАЗА: микроконтроллеры
Рис. 2. Управляющая последовательность |
для режима с единичным шагом |
Рис. 3. Управляющая последовательность |
для режима с половинным шагом |
Рис. 5. Блок/схема канала управления ШД
Рис. 6. Регистр управления
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4. Электрическая схема выхода |
Рис. 7. Регистры сравнения |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
Схема управления |
биполярного |
имеют мостовые схемы, рассчитанные |
вым двигателем, показана на рисун- |
|||||||||||||||||||||||
|
|
шагового двигателя требует наличия |
на большой ток и подключаемые непос- |
êàõ 6 è 7. |
|
|
|
|
|
|
||||||||||||||||||||
|
|
мостовой схемы для каждой из обмо- |
редственно к обмоткам двигателя. Ком- |
Назначение разрядов регистра |
||||||||||||||||||||||||||
|
|
ток. Это позволяет независимо ме- |
бинация ШИМ-генератора и селектора |
управления: |
||||||||||||||||||||||||||
|
|
нять полярность напряжения на каж- |
обеспечивает управление |
двигателем. |
[бит 7] OE2: разрешение выхода. |
|||||||||||||||||||||||||
|
|
дой обмотке. На рисунке 2 показан |
Механизм синхронизации |
позволяет |
Когда этот бит установлен в «1», |
|||||||||||||||||||||||||
|
|
процесс управления для режима с |
синхронизировать работу |
обоих |
внешние выводы PWM2P0 и |
|||||||||||||||||||||||||
|
|
единичным шагом, а на рисунке 3 – |
ШИМ-генераторов. Назначение выво- |
PWM2M0 подключаются к выходам |
||||||||||||||||||||||||||
|
|
для полушагового режима. |
дов процессора показано в таблице 1. |
ШИМ. В противном случае они явля- |
||||||||||||||||||||||||||
|
|
Блок управления шаговым двигате- |
Электрическая схема выхода по- |
ются портами общего назначения. |
||||||||||||||||||||||||||
|
|
казана на рисунке 4. На рисунке 5 |
[бит 6] OE1: то же – для выводов |
|||||||||||||||||||||||||||
|
|
лем в контроллере MB90F598 |
показана структурная схема |
одного |
PWM1P0 è PWM1M0. |
|||||||||||||||||||||||||
|
|
|
|
Блок управления шаговым двигате- |
канала блока управления шаговым |
[биты 5 и 4] P1, P0: выбор рабочей |
||||||||||||||||||||||||
|
|
лем в контроллере MB90F598 включа- |
двигателем. |
|
|
|
|
|
|
|
|
|
частоты ШИМ. Значения битов опре- |
|||||||||||||||||
|
|
ет в себя драйверы, селектор и два |
Структура регистров, ассоцииру- |
деляют (в соответствии с табл. 2) вход- |
||||||||||||||||||||||||||
|
|
ШИМ-генератора. Четыре драйвера |
емых с модулем управления шаго- |
ную частоту для ШИМ-генераторов. |
||||||||||||||||||||||||||
|
|
|
|
Òåë.: (095) 925-6047 |
http://www.elcp.ru |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЭЛЕМЕНТНАЯ БАЗА: микроконтроллеры
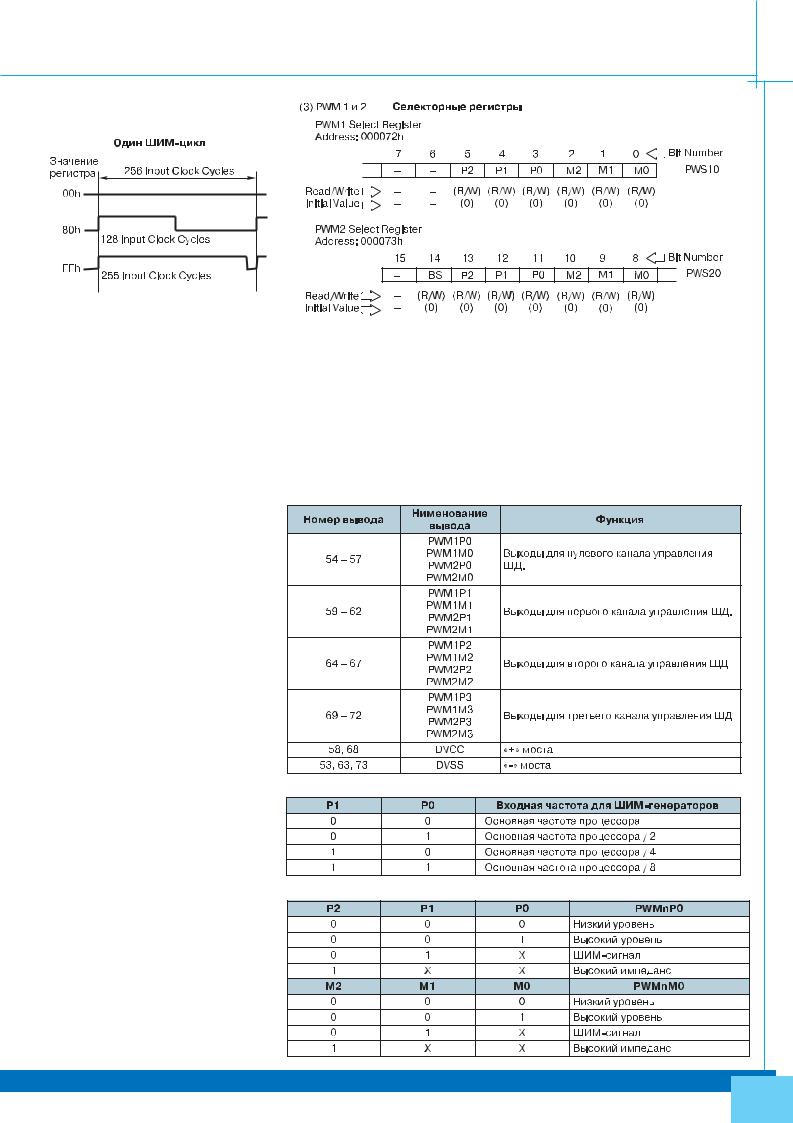
Рис. 8. ШИМ/модуляция
[бит 3] CE: разрешение счета. Этот бит разрешает работу ШИМ-ге- нератора. При его установке в «1», ШИМ-генератор запускается. Второй генератор PWM2 запускается через один машинный цикл после первого. Это позволяет снизить «шумы переключения» в выходных драйверах.
[бит 0] TST: тестовый бит предназна- чен для тестирования процессора. В приложениях пользователя он всегда должен быть установлен в 0 («сброшен»).
Содержимое двух 8-разрядных регистров сравнения (см. рис. 8) определяет ширину импульсов (коэффициент ШИМ-модуляции), как показано на рисунке 8. Значение 00h соответствует заполнению 0%, а FFh – заполнению 99%.
Для изменения значения коэффициента ШИМ-модуляции необходимо занести в регистры сравнения новое значение, после чего записать «1» в бит BS (Update bit) селекторного регистра, показанного на рисунке 9.
Селекторные регистры служат для переключения режимов работы выходов контроллера управления ШД. Рассмотрим назначение отдельных битов этих регистров.
[бит 14] BS: бит модификации (Update bit) устанавливается для синхронных модификаций установок выходов ШИМ-генератора. Любая модификация в обоих регистрах сравнения или в регистрах-селекторах не будет выполнена, пока это этот бит не будет установлен. При записи «1» в этот бит все изменения будут выполнены в конце текущего ШИМ-цикла. Бит автоматически обнуляется в на- чале следующего ШИМ-цикла.
[биты 13 – 11] P2 – P0: эти биты выбирают режим для вывода PWM2P0.
[биты 10 – 8] M2 – M0: то же – для вывода PWM2M0.
[биты 5 – 3] P2 – P0: то же – для вывода PWM1P0.
[биты 2 – 0] M2 – M0: то же – для вывода PWM1M0.
Рис. 9. Селекторные регистры
В таблице 3 представлены соотношения между значениями этих битов и уровнями выходных сигналов.
Таким образом, мы рассмотрели структуру блока управления шаговым двигателем и регистры, используемые для работы с этим блоком. Далее читателю предлагается пример программы, реализующей движение ШД.
Таблица 1. Назначение выводов процессора
Пример программы, реализующей вращение ШД
Изменяя размер шага в выходном сигнале можно управлять скоростью вращения шагового двигателя. Различ- ные значения шага могут быть запрограммированы загрузкой соответствующих значений в регистры сравнения. При управлении ШД нужно преду-
Таблица 2. Значения разрядов при выборе входной частоты для ШИМ/генераторов
Таблица 3. Соотношения между значениями битов и уровнями выходных сигналов
«Электронные компоненты» ¹7’ 2002
91
ЭЛЕМЕНТНАЯ БАЗА: микроконтроллеры
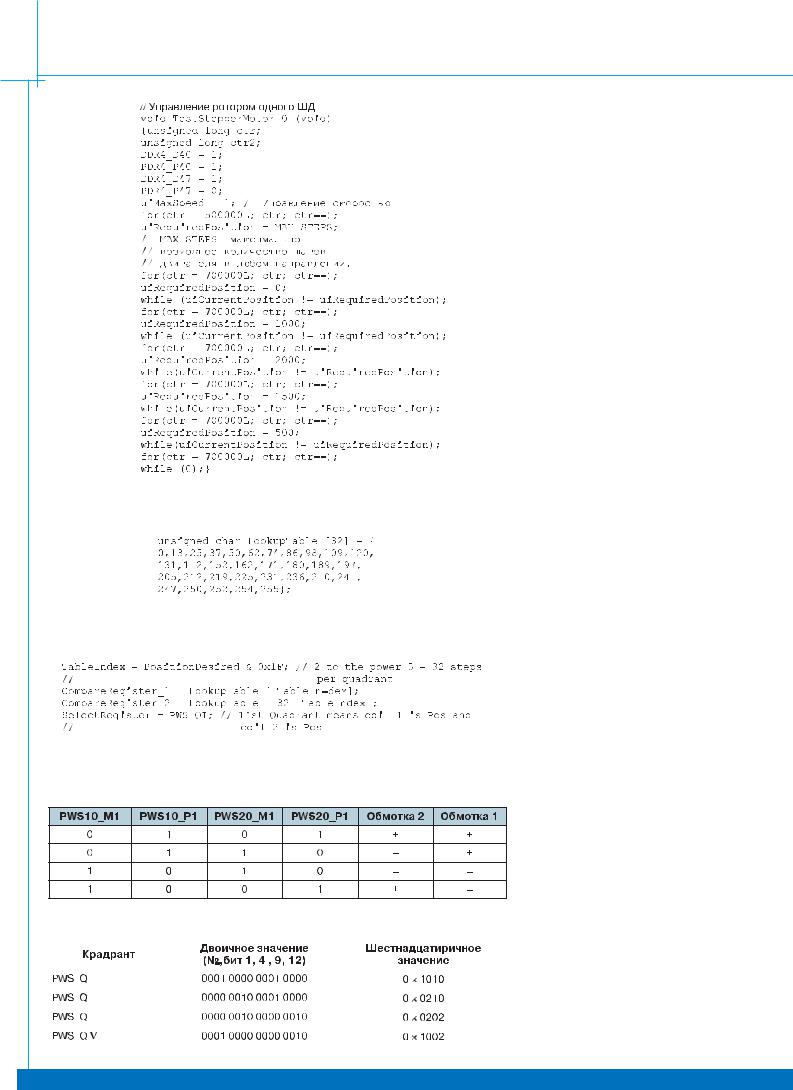
Рис. 10. Фрагмент управляющей программы управления позицией шагового
двигателя
Рис. 11. Фрагмент управляющей программы
Рис. 12. Фрагмент программы определения «псевдо/кода»
Таблица 4. Значения битов и подключаемые обмотки
Таблица 5. Квадранты и соответствующие им значения регистров
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Òåë.: (095) 925-6047 |
http://www.elcp.ru |
|||||||
92 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
смотреть уменьшение скорости вращения при подходе к желаемой позиции (см. представленный ниже фрагмент программы).
Для изменения позиции шагового двигателя программа пользователя должна установить процедуру обработки прерывания по переполнению перезагружаемого таймера. В этой процедуре для управления внешними выводами должны перезагружаться регистры сравнения и устанавливаться сигналы «OE» в регистре управления. Значение периода переполнения перезагружаемого таймера выбирается так, чтобы обеспечить плавность движения выходного вала ШД.
Приведенный фрагмент (см. рис. 10) иллюстрирует управление позицией ЩД за счет установки требуемого параметра в управляющей программе.
Требуемая позиция (значение для сравнения сигнала от входных сенсоров) устанавливается переменной «uiRequiredPosition» в пределах одного шага. Эта переменная модифицируется в обработчике прерывания перезагружаемого таймера до тех пор, пока текущая позиция ротора не совпадет с требуемой. Наличие рассогласования между требуемой и текущей позициями означает, что вал двигателя еще не достиг требуемой позиции.
Селекторный регистр используется для установки нужного квадранта магнитного потока. Например, для двухполюсного двухобмоточного ШД существует четыре различные позиции, в которых может находиться ротор. В зависимости от квадранта программируются регистры сравнения и селекторные регистры, что обеспечивает необходимый поворот ротора.
В предлагаемом примере используется только один из четырех каналов управления ШД, и именно к этому каналу должен быть подключен двигатель. Четыре возможные квадранта могут быть запрограммированы установкой соответствующих значений битов P1 и M1 в селекторных регистрах PWS1 и PWS2. Программирование этих взаимно исключающих квадрантов показано в таблицах 4 и 5.
Четыре квадранта и соответствующие им значения регистров представлены в таблице 5.
Значение регистров сравнения определяет ширину импульса ШИМ. Для сглаженности движения из 256 возможных значений этих регистров выделены 32 (по одному на каждый шаг), представленные следующей таблицей (см. рис. 11).
Таким образом, «псевдо-код», реализующий сравнение и выбор для первого квадранта может выглядеть следующим образом (см. рис. 12).
ЭЛЕМЕНТНАЯ БАЗА: микроконтроллеры
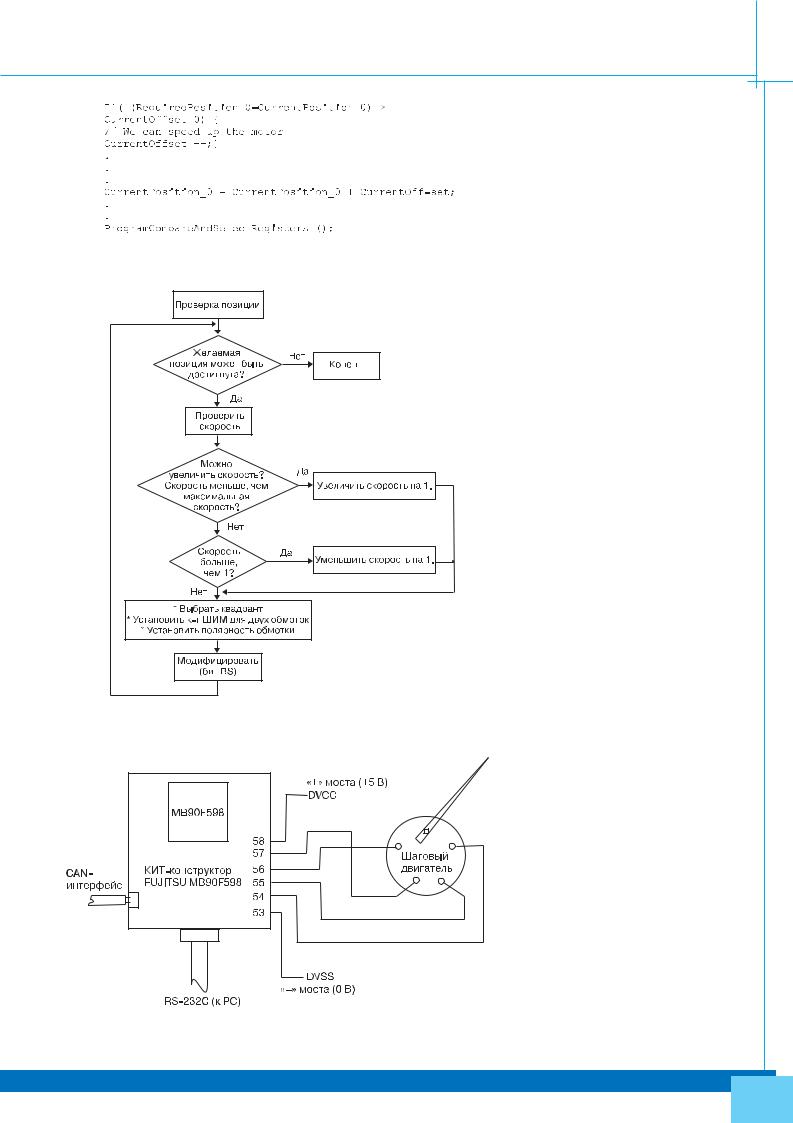
Рис. 13. Условие, необходимое для достижения нужной скорости ротора
Рис. 14. Алгоритм программы управления ШД
Рис. 15. Соединение ШД и контроллера MB90F598
Максимальная скорость вращения определяется физическими возможностями шагового двигателя. При этом скорость регулируется изменением размера шага. Более «длинные» шаги соответствуют большей скорости движения. Необходимо точно устанавливать значе- ния в регистрах сравнения так, чтобы обеспечить снижение скорости по мере приближения к желаемой позиции.
Следовательно, смещение ротора при движении из текущей позиции к желаемой, определяет скорость. Для достижения нужной скорости можно использовать следующее условие (см. рис. 13).
Так, уменьшая переменную «CurrentOffset», можно последовательно снижать скорость при достижении требуемой позиции или максимальной скорости. Ротор может вращаться в двух направлениях: по часовой стрелке и наоборот. При смене направления движения необходимо обеспечивать торможение и разгон ротора. Алгоритм программы показан на рисунке 14.
Заключение
Испытать шаговый двигатель можно используя конструктор FUJITSU. Установленный в конструкторе контроллер MB90F598G позволяет подклю- чать до четырех шаговых двигателей. Конструктор содержит минимальное число элементов, необходимых для работы контроллера, интерфейсные элементы (для подключения к PC), а также макетное поле. Программа может быть подготовлена в интегрированной среде разработки SOFTUNE V3.0 и загружена в контроллер через последовательный порт персонального компьютера при помощи утилиты загрузки Flash Memory Writer.
Для полноценной работы необходимы следующие компоненты:
–конструктор FUJITSU или фирменный конструктор FLASHCAN2 Board, Part No. FLASHCAN2- 100MP-M06;
–микроконтроллер MB90F598 (входит в состав коструктора);
–шаговый двигатель;
–соединительные провода;
–кабель RS-232;
–компьютер с установленной SOFTUNE V3.0;
–прикладная программа;
–программа загрузки контроллера;
–источник питания (5 В; 0,5 А). Схема подсоединения одного шаго-
вого двигателя к контроллеру (конструктору), приведена на рисунке 15.
ЛИТЕРАТУРА
1.MB90F598 Data Sheet.
2.MB90F598 Hardware Manual.
«Электронные компоненты» ¹7’ 2002
93