

Экспериментальный метод.
При экспериментальном методе исследования механизмов кинематические характеристики точек и звеньев механизма регистрируются с помощью датчиков. Датчики регистрируют, и потом и преобразуют кинематические параметры в пропорциональные электрические сигналы, которые после усиления регистрируются различными приборами. В последние годы для регистрации и обработки результатов экспериментальных исследований широко используются ПЭВМ. На рис 5.6 показана экспериментальная установка для исследования кинематических характеристик кривошипно-кулисного механизма пресс-автомата.
Рис. 5.6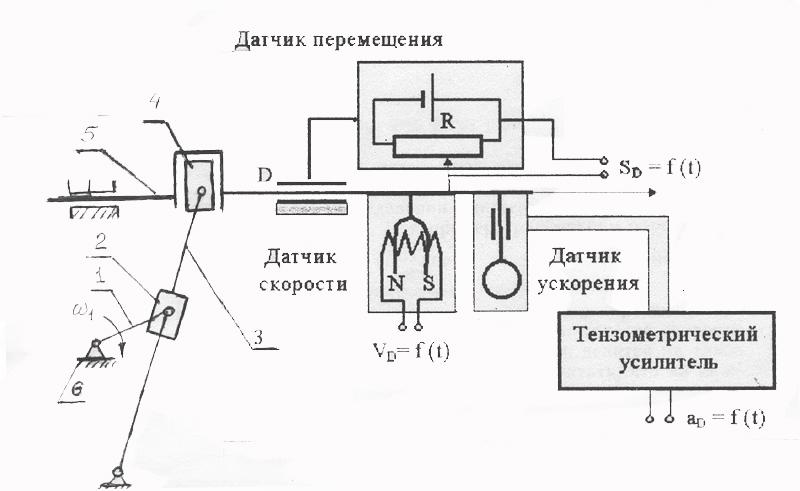
Для измерения перемещения выходного звена используется потенциометрический датчик перемещения, в котором пропорционально положению движка потенциометра изменяется его сопротивление.
для измерения скорости выходного звена используется идукционный датчик скорости, в котором напряжение на концах катушки движущейся в поле постоянного магнита пропорционально скорости катушки;
для измерения ускорения выходного звена используется тензометрическиий акселерометр Он состоит из пластинчатой пружины один конец которой закреплен на выходном звене механизма, а на втором закреплена масса. На пластину наклеены проволочные тензопреобразователи При движении выходного звена с ускорением инерционность массы вызывает изгиб пластины, деформацию тензопреобразователей и изменение их сопротивления пропорциональное ускорению выходного звена.
Метод кинематических диаграмм.
Графическое и численное интегрирование.
Этот метод применяется в тех случаях, когда функцию нельзя проинтегрировать в аналитической форме. Численное интегрирование ведётся по квадратурным формулам Ньютона-Котеса, формулам Гаусса.
При
заданных значениях функций
![]() дляn+1
равноотстоящих
значений аргумента
дляn+1
равноотстоящих
значений аргумента
![]() квадратурные формулы Ньютона-Котеса
имеют вид:
квадратурные формулы Ньютона-Котеса
имеют вид:
правило трапеций для n шагов

правило трапеций для n=1
![]()
правило Симпсона для n=2
![]()
правило Уэддля для n=6
![]()
При вычислениях на ЭВМ используют программы, имеющиеся в каталоге конкретной машины (например, QTFG или QSF).
При
графическом определении интеграла
подынтегральная функция задается
графиком. Для примера рассмотрим
определение угла поворота выходного звена по заданной кривой
выходного звена по заданной кривой![]() ,
полученной экспериментально.
,
полученной экспериментально.
График
угловой скорости
![]() изображается в декартовых координатах
с учетом числовых значений масштабов:
угловой скорости
изображается в декартовых координатах
с учетом числовых значений масштабов:
угловой скорости![]() и времени
и времени![]() .
Промежуток времени от
.
Промежуток времени от![]() до
до![]() ,
делится на такое количество интервалов
,
делится на такое количество интервалов![]() ,
которое позволяет считать, что на каждом
малом промежутке времени
,
которое позволяет считать, что на каждом
малом промежутке времени![]() движение можно принять равномерным.
движение можно принять равномерным.
Эти промежутки времени, отмеченные на рис. 5.7 , а точками 0, 1, 2, 3, 4, не обязательно должны быть равными.
В
каждом интервале времени, например от
![]() до
до![]() можно приближенно считать, что
можно приближенно считать, что
![]()
т.
е. можно принять, что площадь криволинейной
трапеции равновелика площади
прямоугольника высотой
![]() и основанием
и основанием![]() .
.
Концы
средних ординат для каждого интервала
![]() проецируют на ось ординат и соединяют
найденные точки 1', 2', 3' , ... ,i'
с точкой D,
которая ограничивает слева выбранный
отрезок интегрирования OD
длиной К,
мм (рис. 5.7, a).
проецируют на ось ординат и соединяют
найденные точки 1', 2', 3' , ... ,i'
с точкой D,
которая ограничивает слева выбранный
отрезок интегрирования OD
длиной К,
мм (рис. 5.7, a).
Лучи
D1',
D2',
D3',
... , проведенные через точку D,
образуют углы D1’,
![]() с положительным направлением осих,
причем
с положительным направлением осих,
причем
![]() .
.
На
искомом графике
![]() (рис. 5.7, б) проводят линии 01", 1"2"
, 2"3" , ... , параллельные в пределах
соответствующих интервалов
лучам Dl',
D2'
, D3',
... . Первый отрезок 01"
проводят через начало координат 0,
следующие отрезки соответственно через
точку 1",
затем через точку 2"
и т. д. Эти линии наклонены относительно
положительного направления оси х
под углами
(рис. 5.7, б) проводят линии 01", 1"2"
, 2"3" , ... , параллельные в пределах
соответствующих интервалов
лучам Dl',
D2'
, D3',
... . Первый отрезок 01"
проводят через начало координат 0,
следующие отрезки соответственно через
точку 1",
затем через точку 2"
и т. д. Эти линии наклонены относительно
положительного направления оси х
под углами
![]() соответственно, т. е.
соответственно, т. е.
Отрезки на графиках связаны с соответствующими физическими параметрами с помощью масштабов соотношениями:
![]()
Рис. 5.7
![]() получаем:
получаем:

Откуда масштаб искомого графика:
 (5.18)
(5.18)
Графическое и численное дифференцирование.
Графическое дифференцирование начинают с построения графика функции по заданным значениям. При экспериментальном исследовании такой график получают с помощью самопишущих приборов. Далее проводят касательные к кривой в фиксированных положениях и вычисляют значения производной по тангенсу угла, образованного касательной с осью абсцисс.
На рис. 5.8, аизображена кривая![]() полученная экспериментально на установке
(рис. 5.6). Определение углового ускорения
(искомой функции) проводят графическим
дифференцированием по соотношению:
полученная экспериментально на установке
(рис. 5.6). Определение углового ускорения
(искомой функции) проводят графическим
дифференцированием по соотношению:
 (5.19)
(5.19)
Тангенс
угла
![]() наклона касательной к кривой
наклона касательной к кривой![]() в некоторой точкеi
представляют в виде отношения отрезков
в некоторой точкеi
представляют в виде отношения отрезков
![]() ,
гдеК
– выбранный отрезок интегрирования
(рис. 5.8, б)
,
гдеК
– выбранный отрезок интегрирования
(рис. 5.8, б)