

IL
л
DME-85
СВС-85
СВС-85
ИЛС-8X
БМПТ
VOR-85
ИМАТ
БК ПВД
БК ПВД
РВ-85
П-104
СШУ
Т"
РУД
РНО
ДАУ-85
ДАУ-85
OCA-C
<ППД-1 Ы' .Itj ППД-1>
СППД-1 Щ [у ППД-1>
ь
РНО
СУИТ
ЭСУД
АВСА
«Лайнер»
Орлан-85
Арлекин-А
Арлекин-Д
Марс-БМ
Р-861
Р-855А
АРБ-ПМ
Радиосвязное оборудование
Состав комплекса навигации и самолетовождения:
1. Комплексная система электронной индикации и сигнализации в составе:
-
комплексный пилотажный индикатор (КПИ);
-
комплексный индикатор навигационной обстановки (КИНО);
-
индикатор многофункциональный для отображения информации двигателей и самолетных систем (ИМ1);
-
блок вычисления и формирования отображаемой информации (БВФ);
-
пульт управления и индикации КСЭИС (ПУИ).
-
Вычислительная система самолетовождения (ВСС) в составе:
-
двухконтурной вычислительной машины ЦВМ-80-400;
-
комплексные пульты управления и индикации (КПУИ).
-
Система базовых курсовертикалей (сбкв-85) с составе:
-
динамически настраиваемых гироскопических датчиков угловых скоростей (ДУС на ДНГ) в составе гироплатформы;
-
индукционных датчиков (ИД).
-
Система воздушных сигналов (СВС-85) в составе:
-
приемников полного давления (ППД-1);
-
датчиков аэродинамических углов (ДАУ-85);
-
приемников температуры наружного воздуха (П-104);
-
блока контроля обогрева приемников воздушных давлений (БКПВД).
-
Система предупреждения приближения земли (СППЗ).
-
Система автоматического управления полетом в составе:
-
вычислительная система управления полетом и тягой двигателей (ВСУПТ) на базе двухконтурной ЦВМ-80-400;
-
пульт управления и индикации ВСУПТ (ПУИ);
-
блок управления механизмом привода рулей (БМПР);
-
блок управления механизмами управления тягой (БМПТ);
-
исполнительный механизм автомата тяги (ИМАТ);
-
система штурвального управления (СШУ), которая обычно входит в состав самолетного оборудования.
-
Радионавигационное оборудование (РНО) в составе:
-
автоматические радиокомпасы (АРК-25) с пультом управления (ПУИ) - 2 комплекта;
-
доплеровский измеритель скорости и угла сноса (ДИСС-ШО13 МВЛ);
-
радиотехническая система дальней навигации (РСДН);
-
радиотехническая система ближней навигации РСБН с антеннофидерной системой (АФС «Астра»);
-
дальномерная измерительная система (DME) -2 комплекта;
-
всенаправленный УКВ радиомаяк (VOR) - 2 комплекта;
-
ответчик УВД самолетный адресный с режимом S (ОСА-С);
-
метеонавигационная радиолокационная станция МНРЛС;
-
система инструментальной посадки (ILS) - 2 комплекта;
-
радиовысотомер малых высот (РВ-85) - 2 комплекта. Взаимодействующее оборудование:
-
Радиосвязное оборудование в составе:
-
УКВ радиостанции «Орлан-СТ» - 2 комплекта;
-
КВ радиостанция «Арлекин-Д»;
-
система передачи цифровой информации на землю (СПЦИ) «Арлекин-А»;
-
аппаратура внутренней связи авиационная (АВСА) «Лайнер-СТ»;
-
аварийный речевой самописец «Марс-БМ»;
-
аварийная УКВ радиостанция (Р-861);
-
аварийная КВ радиостанция (Р-855А)
-
аварийный радиобуй АРБ-ПК».
-
Самолетное оборудование в составе:
-
система управления и измерения топлива (СУИТ);
-
электронная система управления двигателем (ЭСУД);
-
система преобразования аналоговой и дискретной информации (СПАДИ) - 2 комплекта, которая также может входить в состав КСЭИС или быть самостоятельной системой, собирающей информацию от самолетных систем для вывода на экраны электронных индикаторов.
Технические характеристики комплекса:
-
Погрешность выдерживания линии заданного пути (ЛЗП) - 2а при полетах по:
-
оборудованной трассе с непрерывным радиолокационным контролем и непрерывной коррекцией координат по двум и более дальностям до маяков РСБН или по азимуту и дальности на удалении до радиомаяка до 100 км - 2 км;
-
малооборудованным внутрироссийским трассам с дискретной коррекцией по РСБН не более чем через 450 км - 5 км;
-
по малооборудованным трассам при коррекции по РСДН в зоне до 1000 км в зоне действия троек наземных станций - 7 км;
-
по зарубежным трассам с обеспечением дискретной коррекции по радиомаяким VOR/DME в зоне их действия на расстоянии до 100 км
-
5 м. миль;
-
по зарубежным трассам в режиме зональной навигации при коррекции по двум дальностям - 2 м. мили;
-
в зоне подхода при коррекции по двум и более дальностям в зоне действия радиомаяков РСБН, один из которых находится на аэродроме посадки - 2 км.
-
в зоне подхода с использованием коррекции по азимуту и дальности, один из которых находится на аэродроме посадки - 4 км;
-
в зоне круга с непрерывной коррекцией по двум дальностям до РСБН, один из которых находится в зоне прибытия - 1,4 км;
-
в зоне круга с дискретной коррекцией по азимуту и дальности РСБН, расположенном в зоне аэродрома прибытия - 3 км;
-
Погрешность курсодоплеровского счисления пути с использованием ДИСС, СВС и СБКВ - 1,2 % от пройденного пути.
-
При введении в комплекс спутниковой навигационной системы (СНС) вместо РСДН погрешность выдерживания ЛЗП при полетах:
-
по необорудованным трассам с коррекцией по СНС - 5 км;
-
в зоне подхода с коррекцией по СНС - 1 км;
-
в зоне круга с коррекцией по СНС - 0,7 км.
-
Вертикальное эшелонирование для высот от 900 до 8100 м через 300 м, для высот более 8100 м - через 500 м.
-
Продольное эшелонирование обеспечивается для трасс с радиолокационным наблюдением при допустимом сближении самолетов не менее 20 км и без радиолокационного контроля интервал эшелонирования 5 мин, при этом обеспечивается погрешность пролета пунктов обязательного донесения (ПОД) 0,9 мин при удалении от ПОД 200 км и 1,8 мин при удалении 400 км.
В режиме непрерывной коррекции по СНС погрешность определения времени пролета ПОД соответственно составляет 0,4 и 0,9 мин.
-
Масса комплекса ЦПНК-114 - 470 кг.
-
Связи цифрового оборудования с вычислительными системами и между собой выполняются по ГОСТ 18977-83 и РТМ 1495 с доп. 3, что, в принципе, соответствует ARINC-429.
-
Среднее время наработки на отказ комплекса ЦПНК-114 -300 часов. Вероятность безотказной работы 0,99 за 3 часа полета.
-
Комплекс обеспечивает посадку по II категории ИКАО, если аэродром оборудован соответствующей системой посадки.
Эволюция развития
В настоящее время разрабатывается модернизированный вариант комплекса ЦПНК-114М с улучшенными техническими характеристиками и массой не более 300 кг.
-
ARINC-429 - радиальная шина передачи данных по ГОСТ 18977 и РТМ-1495 с доп. 3 в КСПНО (характеристика, принцип кодирования и передачи алфавитно-цифровой и служебной информации, методы контроля информации в шине).
Каналы ПК по АRINC-429 используются для передачи цифровых данных между элементами систем авиационной электроники. На бортах летательных аппаратов, гражданских и военных, до 75% цифрового межсистемного обмена приходится на каналы интерфейса ARlNC- 429, таким образом, этот интерфейс является основным «интеллектуальным» связующим звеном в системах авиаэлектроники.
Стандарт АRINC-429 и его отечественные аналоги ГОСТ18977-79 и РТМ 1495-75 описывают вид, параметры сигналов, структуру кодов и протоколы сообщений.
В основу интерфейса заложен вид биполярного двухфазного сигнала (в специальной литературе описывается как RZ-код), передаваемого по бифилярной экранированной линии связи. Передача осуществляется на стандартизованных частотах (период-Т), 32-х разрядными словами ПК, включающими адресную и информационную части, и 32-й разряд - бит контроля по четности (Sum). Слова разделяются обязательной «паузой» - отсутствием сигнала в линии в течение 4-40Т, которая определяет окончание слова ПК (см. рис. 1).
Рис.1.
Вид сигналов и структура слова
последовательного кода по AR-
ING
-
429.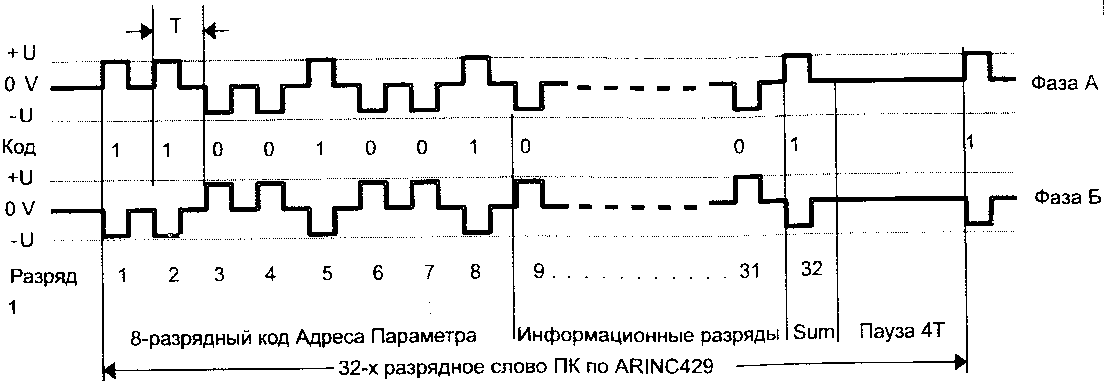
Биполярный сигнал RZ (рис. 1) обладает лучшими, по сравнению с униполярным RZ-кодом, энергетическими характеристиками. Единица представлена положительным уровнем напряжения, нуль— отрицательным. Средняя мощность равна A2/4R, т. е. половине средней мощности униполярного сигнала, хотя перепад уровней тот же самый. Код имеет два недостатка:
-
Ретрансляторы и приемники способны надежно восстановить синхронизирующую временную сетку только тогда, когда паузы между импульсами не слишком велики. Появление очередного импульса после незначительной паузы позволяет каждый раз корректировать «ход часов» ретранслятора или приемника. С увеличением паузы надежность «службы времени» этих устройств падает. Например, после передачи серии из 10 тыс. нулей приемник не сможет точно определить, находится ли последующая единица на позиции 9999, 10000 или 10001. Другими словами, при передаче достаточно большой последовательности нулей приемник (или ретранслятор) теряет синхронизацию с передатчиком (или ретранслятором).
-
Отсутствие возможности оперативной регистрации ошибок, таких, как пропадание пли появление лишних импульсов из-за помех.
Эти недостатки ликвидируются введением избыточности, а именно скорость передачи сигналов по линии выбирается равной скорости передачи информации, однако вводятся дополнительные электрические уровни. В данном случае - «нулевого» уровня. А также использованием двух фаз.
Интерфейс ARINC-429 называется радиальным, т.к. в интерфейсе обычно к одному каналу подключен только один передатчик, а каждая принимающая система должна иметь свою радиальную физическую линию связи с этим передатчиком (соединение типа звезда). Наличие в структуре кода 8-разрядной адресной части позволяет передавать в канале до 256 различных параметров. Адрес параметра, структура информационной части кода и протокол строго определяются стандартом.
Классическая схема, реализующая один канал ПК ARINC-429, включает не менее 75-ти триггеров различного типа, что при построении 8-ми канального контроллера еще не в такие далекие времена, да еще на отечественной элементной базе, было непозволительной роскошью, поэтому первые контроллеры строились с многоканальными коммутаторами на входных каналах и минимальным количеством выходных каналов, работающих на несколько переключаемых передатчиков.
Рис.2.
Пример построения схемы входного
преобразователя ПК по AR-
ING
-
429.
ГИ
- вход от Генератора Импульсов; D,C
-
выход данных, синхросигнала приемника;
F
-
частота опроса паузы.
На рис.2 приведена классическая схема одноканального входного преобразователя ПК по ARINC-429, на входах его приемника может быть установлен аналоговый коммутатор на любое количество каналов, но в каждый момент времени «слушается» только один канал, информация других каналов безвозвратно теряется, что в системах реального времени (СРВ), особенно авиационных, не всегда допустимо.
-
Мультиплексная двунаправленная шина передачи данных по ГОСТ 26765.52-87 (Mil-std-1553B) (характеристика, принцип кодирования и передачи алфавитно-цифровой и служебной информации, методы контроля информации в шине).
Информационное слово содержит следующие поля (в разрядах): С (3); информацию (16). Ответное слово содержит следующие поля (в разрядах): С (3); адрес ОУ (5); признаки состояния (11).
Для локального многоточечного соединения распределенных подсистем специального назначения широко применяются стандартизированные интерфейсы последовательных мультиплексных (магистральных) каналов (МК) типа MIL-1553B, MIL-1773. Интерфейсы обеспечивают расширенные режимы адресации, включая широковещательный режим, защиту от помех и идентификацию ошибок передачи.
В состав МК входят контроллер (К), оконечные устройства (ОУ) в количестве до 32, линии передачи информации. Контроллер, обычно входящий в состав ЭВМ, управляет обменом информацией, осуществляет сопряжение с линией передачи и контроль передачи информации, состояния ОУ и самоконтроль. Оконечное устройство принимает и выполняет адресованные ему команды контроллера, осуществляет сопряжение подключенного оборудования с линией передачи информации, контролирует передачу информации, производит самоконтроль и передает результаты контроля в контроллер.
Обмен информацией осуществляется по принципу команда-отчет с временным разделением сообщений. Информация передается в МК в виде сообщений, состоящих из командных (КС), информационных (ИС) и ответных слов (ОС).
В МК предусмотрены три вида передач сообщений:
от К к ОУ;
от ОУ к К;
от ОУ к ОУ.
Порядок следования сообщений произвольный.
Форматы сообщений при передаче информации:
-
от К к ОУ— (КС, ИС, ..., ИС, Т 1, КС, ТЗ);
-
от ОУ к К— (КС, Т2, ОС, ИС,..., ИС, ТЗ);
-
от ОУ к ОУ— (КС, КС, Т2, ОС, ИС, ...,ИС, Т1, ОС, ТЗ),
где Т1, Т2, ТЗ — времена соответствующих пауз (Т1 — между последним ИС массива и ОС; Т2 — между КС и ОС; ТЗ — между последним ИС или КС и КС следующего сообщения).
Формат командного сообщения (приказа) от К к ОУ — (КС, Т2, ОС, ТЗ). Информационные сообщения передаются пословно или массивами длиной до 32 слов. Передача информации осуществляется последовательным цифровым кодом по общей линии МК, асинхронным способом с выделением синхронизирующих сигналов из принимаемого кода в полудуплексном режиме.
Формат К.С, ИС, ОС (в разрядах): С—синхросигнал (3), информация— (215...20), Р—контроль по нечетности (1).
Информация длиной более 16 разрядов передается последовательно в двух словах, в первом — с большим весом, во втором — с меньшим весом, неиспользованные разряды — в виде лог. 0.
Командное слово содержит следующие поля (разряды): адрес ОУ (5); признак «прием/передача» (1); подадрес/режим управления (5); число информационных слов/код режима управления (5).
Каждому ОУ присваивается один из 32 адресов, за исключением адреса 31, зарезервированного для специальных целей (широковещательного режима). Подадрес используется для указания адреса вводимой/выводимой информации. Код 0 подадреса указывает ОУ, что поле числа слов содержит код команды управления.
Число информационных слов указывается ОУ в двоичном коде, причем коду 0 соответствует число 32.
В качестве кода передачи информации применяется биполярный двухуровневый фазоманипулированный код без возвращения к нулю, так называемый код Манчестер-II. Скорость передачи составляет 1 Мбит/с±0,1 %. Манчестер-II является кодом, в котором скорость передачи сигналов по линии выбирается большей, чем скорость передачи информации, без использования дополнительных электрических уровней сигналов.
-
Комплекс КСПНО-334 (основное отличие от КСПНО-204/96)
Выполнен на базе ЦПНК-114, но изменена система индикации, 3 БВМ взяли функцию СПКР, СБКВ заменены на БИНС, исключены ДИСС. В остальном смотри ЦПНК-114 и КСПНО-204/96.
-
Основные принципы, заложенные в интегральной модульной авионике для перспективных самолетов
Сочинение на тему «...» ©
К основным принципам заложенным в интегральной модульной авионике можно отнести следующие:
-
реализация интегрированных комплексов бортового оборудования, построенных на универсальных вычислительных системах с организацией обработки пилотажно-навигационной информации на нескольких последовательных уровнях;
-
объединение отдельных приборов в единые интегрированные системы (например в КСПНО-204/96 для управления работой радионавигационных систем и систем радиосвязи разработан интегрированный пульт управления (КПРТС). Установка 2-х таких пультов в кабине экипажа позволяет исключить 12 автономных пультов, используемых ранее, а так же различные системы ВСУПТ, вСс, и т.д.);
-
применение принципов искусственного интеллекта, для решения пилотажно-навигационных задач и обеспечения безопасности пилотирования и самолетовождения;
-
увеличение точности обработки сигналов, уменьшения габаритов, веса и стоимости изделий.
90. Интегрирование систем, выполненных по ARINC-700 на современных самолетах.
Техническая обоснованность и целесообразность перехода бортового оборудования на исполнение с применением цифровой вычислительной техники: встраиваемых микро ЭВМ, микропроцессоров, центральных процессоров и вычислительных систем, привела к необходимости разработки соответствующих нормативных и рекомендательных документов. Международная корпорация авиационных радиоинженеров разработала серию документов на цифровые системы ARINC-700, которые имеют рекомендательный характер и охватывают практически все бортовое оборудование. Главной целью этих документов была стандартизация габаритных и присоединительных размеров, входных и выходных электрических сигналов и расписание их по соответствующим контактам штепсельных разъемов, реализуемых той или иной системой функций и условий их применения. Такая стандартизация позволила применять или заменять при отказе одноименные системы любой фирмы и в любом аэропорту. Перечень таких документов постоянно пополняется, а сами документы совершенствуются. Требования ARINC-700:
-
Обмен сигналов оборудования цифровой односторонний (радиальные связи).
-
Простота и удобство эксплуатации оборудования.
-
Электрические связи должны быть такими, чтобы оборудование было взаимозаменяемое.
Перечень систем соответствующих ARINC-700 приведен в таблице.
|
N п/п |
Русское наименование системы |
номер документа |
|
1 |
Вычислительная система управления полетом (ВСУП) |
ARINC-701 |
|
2 |
Вычислительная система самолетовождения (ВСС) |
ARINC-702 |
|
3 |
Вычислительная система управления тягой (ВСУТ) |
ARINC-703 |
|
4 |
Бесплатформенная инерциальная система (БИНС) |
ARINC-704 |
|
5 |
Бесплатформенная курсовертикаль (БКВ) |
ARINC-705 |
|
6 |
Система воздушных сигналов (СВС) |
ARINC-706 |
|
7 |
Радиовысотомер (РВ) |
ARINC-707 |
|
8 |
Бортовой метеолокатор (МНРЛС) |
ARINC-708 |
|
9 |
Бортовое оборудование измерения даль |
ARINC-709 |
|
|
ности (СД) |
|
|
10 |
Бортовой приемник инструментальной системы посадки (СП) |
ARINC-710 |
|
11 |
Бортовой приемник VOR |
ARINC-711 |
|
12 |
Автоматический радиокомпас (АРК) |
ARINC-712 |
|
13 |
Система селективного вызова |
ARINC-714 |
|
14 |
Усилитель связи с пассажирами |
ARINC-715 |
|
15 |
Приемопередатчик высокочастотной радиосвязи (УКВ) |
ARINC-716 |
|
16 |
Бортовая система сбора данных |
ARINC-717 |
|
17 |
Ответчик УВД, тип 3 (радиомаячной системы УВД режим S) |
ARINC-718 |
|
18 |
КВ приемопередатчик, работающий на одной боковой полосе |
ARINC-719 |
|
19 |
Система цифрового выбора частоты и режимов работы |
ARINC-720 |
|
20 |
Мультиплексная система развлечения пассажиров |
ARINC-721 |
|
21 |
Система проекционного видения |
ARINC-722 |
|
22 |
Система предупреждения близости земли (СППЗ) |
ARINC-723 |
|
23 |
Система связной адресации и передачи сообщений ARINC (СПЦИ) |
ARINC-724 |
|
24 |
Электронные пилотажные приборы (ЭСИ) |
ARINC-725 |
|
25 |
Вычислительная система предупр. опасных режимов (СПКР) |
ARINC-726 |
|
26 |
Система микроволновой посадки (МСП) |
ARINC-727 |
|
27 |
Бортовая система рефрижераторного охлаждения |
ARINC-728 |
|
28 |
Система преобразования аналоговых и дискретных данных |
ARINC-729 |
|
29 |
Бортовая система гарантированного разведения самолетов |
ARINC-730 |
|
30 |
Электронный хронометр (ХАЭ) |
ARINC-731 |
|
31 |
Магнитофон воспроизведения записи системы развлечения пассажиров |
ARINC-732 |
|
32 |
Мультиплексирование данных двигательной установки |
ARINC-733 |
|
33 |
Система обнаружения и изоляции ошибок (ССЛО) |
ARINC-734 |
|
34 |
Система тревожной сигнализации предотвращения столкновений |
ARINC-735 |
|
35 |
Система управления радио средствами |
ARINC-736 |
|
36 |
Система веса и балансировки |
ARINC-737 |
|
37 |
Совмещенная система воздушных сигналов и инерциальная система (СВС-БИНС) |
ARINC-738 |
|
38 |
Многоцелевой блок управления и индикации (КПУИ) |
ARINC-739 |
|
39 |
Стандартное печатающее устройство (АЦПУ) |
ARINC-740 ARINC-744 |
|
40 |
Система авиационной спутниковой связи (ССС) |
ARINC-741 |
|
41 |
Система сдвига ветра |
ARINC-742 |
|
42 |
Система глобальной навигации |
ARINC-743 |
|
43 |
Автоматическое зависимое наблюдение |
ARINC-745 |
|
44 |
Салонная система связи |
ARINC-746 |
|
— |
Характер ЛА |
|
— |
ОУЭ |
|
— |
Требования НТД |
|
Назначение, тех. |
||||||||
|
|
|
|
|
|
|
|
обеспечение |
||||||||||
|
|
Тип ЛА |
|
|
Дальность |
|
— |
ЕНЛГС |
|
|
системы |
|||||||
|
|
|
|
|
полета |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Назначение |
||||||||||
|
|
Кол-во |
|
|
Категории |
|
_ |
FAR-25 |
|
— |
оборудова |
|||||||
|
|
пассажиров |
|
|
посадки и |
|
|
|
|
ния |
||||||||
|
— |
и кол-во |
|
|
метеооб |
|
|
|
|
|
||||||||
|
|
членов |
|
|
становки |
|
|
ARINC |
|
|
Тренажер |
|||||||
|
|
экипажа |
|
|
|
|
|
|
|
ные классы |
||||||||
|
|
|
|
Требуемая точность, надежность |
|
|
|
|
||||||||||
|
— |
Стоимость |
|
— |
|
|
— |
Система эксплуата |
||||||||||
|
|
|
|
|
|
|
ции |
|||||||||||
Интеграция по ARINC-700 заключается в объединении стандартизованных модулей в крэйты. Каждый крэйт представлюет собой совокупность модулей более низшего иерархического уровня, объединенных по типам оборудования, например крэйт РТО. Смысл такой интеграции заключается в уменьшении занимаемого пространства, уменьшении массы (за счет уменьшения соединительных проводов и фидеров), удобства эксплуатации и обслуживания.
4.Наземное оборудование радиотехнических систем УВД (назначение, состав, выполняемые функции, тип, характеристики) 6
5.Наземное оборудование радиотехнических систем дальней и глобальной навигации (назначение, состав, выполняемые функции, тип, характеристики). 8
6.Классы аэродромов (технические характеристики). 9
7.Метеоминимум для посадки категории I, IA (требования ICAO) 11
8.Метеоминимум для посадки категории, II (требования ICAO). 12
9.Метеоминимум для посадки категории IIIA, 111В, 111С (требования ICAO). 12
10.Системы горизонтального, вертикального и продольного эшелонирования воздушных судов (нормы ICAO). 15
11.Требования АП-25, раздел F и приложения П25Р. НЛГС к составу пилотажно-навигационного оборудования, устанавливаемого на различных самолетах. 18
13.Факторы, определяющие выбор конкретного состава оборудования и критерии его оптимизации. 22
6,0 27
16.Инерциальные курсовертикали (назначение, состав, выполняемые функции, типы, характеристики). 1726
24.Системы предупреждения критических режимов, ВКРС, АУАСП, ССОС (назначение, состав, выполняемые функции, технические характеристики). 3644
25.Система предупреждения приближения земли СППЗ-85 (назначение, связи с другими системами, выполняемые функции) 3646
26.Системы предупреждения критических режимов СПКР-85 (назначение, связи с другими системами, выполняемые функции) 3647
33.Автоматические радиокомпасы (назначение, требования ЕНЛГС, типы, выполняемые функции). 3659
36.РСБН А-331 и РСБН-85 (основные технические характеристики). 3667
*© 3669
8.3.4.2.2.Радиотехническое оборудование посадки MLS. 3676
8.3.4.3.Радиотехническое оборудование посадки дециметрового диапазона. 3676
46.Радиомаячные системы сантиметрового диапазона MLS (назначение, принцип действия, требования ЕНЛГС, выполняемые функции, размещение маяков). 3684
47.Бортовая аппаратура управления воздушным движением (УВД) 3688
48.Самолетный ответчик СО-72М 3691
51.Система предупреждения столкновений «Эшелон» 3699
52.Радиосистема дальней навигации «Loran-C» (назначение, требования ЕНЛГС, типы, выполняемые функции). 3701
54.РСДН А-723 (назначение, состав, выполняемые функции, технические характеристики) 3702
55.Спутниковые навигационные системы (назначение, требования ЕНЛГС, типы, выполняемые функции). 3704
59.ДИСС ШО-13 (назначение, состав, выполняемые функции, технические характеристики). 3720
L = 5 5 V V 3723
ese 512ж2 • R2 - где 3723
61.МНРЛС «Гроза» и «Буран» (назначение, состав, выполняемые функции, технические характеристики). 3725
67.Навигационные вычислительные системы (НВС) (назначение, требования ЕНЛГС, типы, выполняемые функции). 3732
71.Электромеханические системы отображения информации (назначение, требования ЕНЛГС, состав, выполняемые функции). 3740
72.Экранные системы индикации (назначение, требования ЕНЛГС, состав, выполняемые функции). 3742
73.Основные требования к авиационным СОИ. 3745
76.Содержание информации на индикаторах СЭИ. 3759
77.Принципы комплексирования бортового оборудования 3766
-
Мультиплексная двунаправленная шина передачи данных по ГОСТ 26765.5287 (Mil-std-1553B) (характеристика, принцип кодирования и передачи алфавитноцифровой и служебной информации, методы контроля информации в шине). .185
4.Наземное оборудование радиотехнических систем УВД (назначение, состав, выполняемые функции, тип, характеристики) 6
5.Наземное оборудование радиотехнических систем дальней и глобальной навигации (назначение, состав, выполняемые функции, тип, характеристики). 8
6.Классы аэродромов (технические характеристики). 9
7.Метеоминимум для посадки категории I, IA (требования ICAO) 11
8.Метеоминимум для посадки категории, II (требования ICAO). 12
9.Метеоминимум для посадки категории IIIA, 111В, 111С (требования ICAO). 12
10.Системы горизонтального, вертикального и продольного эшелонирования воздушных судов (нормы ICAO). 15
11.Требования АП-25, раздел F и приложения П25Р. НЛГС к составу пилотажно-навигационного оборудования, устанавливаемого на различных самолетах. 18
13.Факторы, определяющие выбор конкретного состава оборудования и критерии его оптимизации. 22
6,0 27
16.Инерциальные курсовертикали (назначение, состав, выполняемые функции, типы, характеристики). 1726
24.Системы предупреждения критических режимов, ВКРС, АУАСП, ССОС (назначение, состав, выполняемые функции, технические характеристики). 3644
25.Система предупреждения приближения земли СППЗ-85 (назначение, связи с другими системами, выполняемые функции) 3646
26.Системы предупреждения критических режимов СПКР-85 (назначение, связи с другими системами, выполняемые функции) 3647
33.Автоматические радиокомпасы (назначение, требования ЕНЛГС, типы, выполняемые функции). 3659
36.РСБН А-331 и РСБН-85 (основные технические характеристики). 3667
*© 3669
8.3.4.2.2.Радиотехническое оборудование посадки MLS. 3676
8.3.4.3.Радиотехническое оборудование посадки дециметрового диапазона. 3676
46.Радиомаячные системы сантиметрового диапазона MLS (назначение, принцип действия, требования ЕНЛГС, выполняемые функции, размещение маяков). 3684
47.Бортовая аппаратура управления воздушным движением (УВД) 3688
48.Самолетный ответчик СО-72М 3691
51.Система предупреждения столкновений «Эшелон» 3699
52.Радиосистема дальней навигации «Loran-C» (назначение, требования ЕНЛГС, типы, выполняемые функции). 3701
54.РСДН А-723 (назначение, состав, выполняемые функции, технические характеристики) 3702
55.Спутниковые навигационные системы (назначение, требования ЕНЛГС, типы, выполняемые функции). 3704
59.ДИСС ШО-13 (назначение, состав, выполняемые функции, технические характеристики). 3720
L = 5 5 V V 3723
ese 512ж2 • R2 - где 3723
61.МНРЛС «Гроза» и «Буран» (назначение, состав, выполняемые функции, технические характеристики). 3725
67.Навигационные вычислительные системы (НВС) (назначение, требования ЕНЛГС, типы, выполняемые функции). 3732
71.Электромеханические системы отображения информации (назначение, требования ЕНЛГС, состав, выполняемые функции). 3740
72.Экранные системы индикации (назначение, требования ЕНЛГС, состав, выполняемые функции). 3742
73.Основные требования к авиационным СОИ. 3745
76.Содержание информации на индикаторах СЭИ. 3759
77.Принципы комплексирования бортового оборудования 3766
1 При дополнительных требованиях потребителя.Диапазон масштабов дальности от 5 до 640 км с шагом 5 км или от 5 до 320 морских миль с шагом 5 миль.
Высокий потенциал МНРЛС получен за счет цифровой обработки сигнала на промежуточной частоте, линейности приемника (больше 65