

Основные технические характеристики
Диапазоны выдаваемых сигналов:
абсолютная барометрическая высота Набс, м минус 500 ... 30000 относительная барометрическая высота Нотн, м 0 ... 30000 истинная воздушная скорость, Vucm, км/ч 150...3500
приборная скорость V , км/ч 150... 1600
число М 0.3 ... 3.24
вертикальная скорость Vy, м/с минус 200 ... 200
угол скольжения, в, град минус 15 ... 15
температура наружного воздуха Тн, °С минус 70 ... 60
заданная геометрическая высота Нг, м 0 ... 1000
отклонение геометрической высоты DHS, м минус 100 ... 100 отклонение абсолютной барометрической высоты DHS, м
минус 512 ... 512 угол атаки а, град минус 4 ... 46
вертикальная перегрузка ny, g минус 4 ... 10
геометрическая высота Нг, м 0 ... 6000
отклонение М минус 0,128 ... 0,128
максимально допустимое число М 0,7 ... 3,0
максимально допустимая приборная скорость Vnpдоп, км/ч
500 ... 1600
минимально допустимая приборная скорость Vmnдоп, км/ч
200 ... 500
максимально допустимый угол атаки amaxдоп, град 5 ... 30 минимально допустимый угол атаки атП доп, град минус 10 ... 5 максимально допустимая перегрузка nymaxдоп, g 1.5 ... 9 минимально допустимая перегрузка nyтП доп, g минус 4...0
Напряжение питания переменного тока частотой 400 Гц, В: трехфазное 36; 200/115
однофазное 5,5, 115
4.Наземное оборудование радиотехнических систем УВД (назначение, состав, выполняемые функции, тип, характеристики) 6
5.Наземное оборудование радиотехнических систем дальней и глобальной навигации (назначение, состав, выполняемые функции, тип, характеристики). 8
6.Классы аэродромов (технические характеристики). 9
7.Метеоминимум для посадки категории I, IA (требования ICAO) 11
8.Метеоминимум для посадки категории, II (требования ICAO). 12
9.Метеоминимум для посадки категории IIIA, 111В, 111С (требования ICAO). 12
10.Системы горизонтального, вертикального и продольного эшелонирования воздушных судов (нормы ICAO). 15
11.Требования АП-25, раздел F и приложения П25Р. НЛГС к составу пилотажно-навигационного оборудования, устанавливаемого на различных самолетах. 18
13.Факторы, определяющие выбор конкретного состава оборудования и критерии его оптимизации. 22
6,0 27
16.Инерциальные курсовертикали (назначение, состав, выполняемые функции, типы, характеристики). 1726
24.Системы предупреждения критических режимов, ВКРС, АУАСП, ССОС (назначение, состав, выполняемые функции, технические характеристики). 3644
25.Система предупреждения приближения земли СППЗ-85 (назначение, связи с другими системами, выполняемые функции) 3646
26.Системы предупреждения критических режимов СПКР-85 (назначение, связи с другими системами, выполняемые функции) 3647
33.Автоматические радиокомпасы (назначение, требования ЕНЛГС, типы, выполняемые функции). 3659
36.РСБН А-331 и РСБН-85 (основные технические характеристики). 3667
*© 3669
8.3.4.2.2.Радиотехническое оборудование посадки MLS. 3676
8.3.4.3.Радиотехническое оборудование посадки дециметрового диапазона. 3676
46.Радиомаячные системы сантиметрового диапазона MLS (назначение, принцип действия, требования ЕНЛГС, выполняемые функции, размещение маяков). 3684
47.Бортовая аппаратура управления воздушным движением (УВД) 3688
48.Самолетный ответчик СО-72М 3691
51.Система предупреждения столкновений «Эшелон» 3698
52.Радиосистема дальней навигации «Loran-C» (назначение, требования ЕНЛГС, типы, выполняемые функции). 3700
54.РСДН А-723 (назначение, состав, выполняемые функции, технические характеристики) 3701
55.Спутниковые навигационные системы (назначение, требования ЕНЛГС, типы, выполняемые функции). 3703
57.Дифференциальный режим GPS (принцип действия, основные технические характеристики, область применения). 3707
62.ДИСС ШО-13 (назначение, состав, выполняемые функции, технические характеристики). 3715
L = 5 5 V V 3717
ese 512ж2 • R2 - где 3717
64.МНРЛС «Гроза» и «Буран» (назначение, состав, выполняемые функции, технические характеристики). 3719
67.Системы экстремальной навигации с использование физических полей земли и рельефа местности. 3724
68.Навигационные вычислительные системы (НВС) (назначение, требования ЕНЛГС, типы, выполняемые функции). 3725
72.Электромеханические системы отображения информации (назначение, требования ЕНЛГС, состав, выполняемые функции). 3733
73.Экранные системы индикации (назначение, требования ЕНЛГС, состав, выполняемые функции). 3735
74.Основные требования к авиационным СОИ. 3738
77.Содержание информации на индикаторах СЭИ. 3751
78.Принципы комплексирования бортового оборудования 3758
-
Системы предупреждения критических режимов, ВКРС, АУАСП, ССОС (назначение, состав, выполняемые функции, технические характеристики).
Вычислитель критических режимов скорости и числа маха (ВКРС) выдает сигналы:
-
VMD (Vmax э) - максимальная эксплуатационная скорость;
-
MMD (Mmax э) - максимальное эксплуатационное число Маха;
-
Vd (Vmax max) - расчетная предельная скорость для данного типа самолета;
-
MD (Mmax max) - расчетное предельное число маха для данного типа самолета.
Из ЕНЛГС: Для самолетов с ГТД и самолетов, у которых Vmax э больше 0,8 Vmax max и M больше 0,8 Mmax max, пилотам необходим указатель со звуковой сигнализацией, если скорость Vmax э на 11 км/ч превышает и M на 0,01 превышает Mmax э.
Выработку такого сигнала обеспечивает вычислитель критических режимов скорости полета ВКРС, совместно с указателем скорости и числа маха УМС, который выдает сигнал при указанных условиях, а при их превышении - звуковой сигнал. ВКРС использует сигналы СВС, как датчика.
Автомат углов атаки сигнализации перегрузок (АУАСП): к критическим режимам относится угол атаки и максимальных перегрузок, где используется АУАСП, служащий для определения и индикации на всех режимах полета. В нее входят датчик углов атаки ДУА-1-3, датчик перегрузок ДП-3, указатель угловых перегрузок УАП, индикатор, вычислитель. Дополняется сигнальными лампами и системой контроль/сброс.
АУАСП воспринимает перегрузки от - 1 до +3 g. Красный сектор 12,3° ... 15° и от 2 ... 3,4 включается сигнальная лампа. Существует общая сигнальная лампа, которая включается при углах атаки больше 11,2° или перегрузке больше 2,4 g.
Система сигнализации опасного сближения земли ССОС предназначена для решения логических выражений и выработки сигнала предупреждения при снижении самолета меньше 750 метров, недопустимым сближением с рельефом местности, недопустимой скорости снижения высоты при заходе на 2-ой круг, полет с выпущенными закрылками и шасси, уход с глиссады, недопустимой разницы сигналов между барометрическим высотомером и радиовысотомером. ССОС использует сигналы вычислителей, СВС, посадочных систем, гк и вг, разовые
сигналы шасси выпущено / убрано. ССОС - аналоговая система.
-
Система предупреждения приближения земли СППЗ-85 (назначение, связи с другими системами, выполняемые функции)
На самолетах с числом пассажиров более 30 требуется установка системы предупреждения приближения земли, на самолетах с большим числом пассажиров рекомендуется установка система определения веса и балансировки самолета, устанавливается система спасения и эвакуации пассажиров при авариях и дополнительные средства связи, например спутниковая связь и др. Вследствие того, что на дальне магистральном самолете количество пассажиров превышает 200 человек, то установка данной системы необходима. Системы ССПЗ-85 и СППЗ-2 являются дополнительным средством повышения безопасности полетов и выдают экипажу речевые и световые предупреждающие сигналы при непреднамеренном опасном сближении с землей.
Выдача предупреждающих сигналов происходит при превышении вертикальной скорости снижения, при превышении скорости сближения с землей, при потере барометрической высоты Система реагирует на полет вблизи земли с невыпущенными шасси или закрылками не в посадочной конфигурации, на чрезмерное отклонение самолета вниз от глиссады и на превышение установленного значения разности между геометрической и барометрической высотами при снижении. Кроме этого, система СППЗ-2 сигнализирует попадание в условия опасного сдвига ветра.
В системах обрабатывается информация, поступающая от радиовысотомера, системы воздушных сигналов, посадочных систем ILS или MLS, бортовой инерциальной системы, датчиков положения шасси и закрылков. В СППЗ-2 обрабатывается также информация от вычислительных систем самолетовождения и управления полетом.
Системы предназначены для установки на пассажирские и транспортные самолеты, имеющие пилотажно-навигационное оборудование с цифровым обменом информацией.
Выходные сигналы:
дискретный (максимальный), А . 2
речевой мВт/Ом 40/600
последовательный биполярный код по ARINC-429
Напряжение питания переменного тока частотой 400 Гц, В. 115 Потребляемая мощность, Вт:
СППЗ-85
СППЗ-2
20
25
Габаритные размеры по ARINC-600 Масса, кг
2 MCU 3.5
-
Системы предупреждения критических режимов СПКР-85 (назначение, связи с другими системами, выполняемые функции)
Система предупреждения критических режимов полета предназначена для:
-
вычисления пороговых значений (границ эксплуатационных допусков) контролируемых параметров полета;
-
выдачи информации о пороговых значениях контролируемых параметров полета в систему электронной индикации;
-
формирования и выдачи в информационную систему сигнализации, в системы аварийной и электронной индикации предупреждающих сигналов о приближении параметров полета к своим пороговым значениям;
-
формирования и выдачи в систему сбора и локализации отказов информации о режимах работы, готовности и работоспособности вычислителей СПКР-85.
Система является многоблочным изделием, состоящим из двух отдельных идентичных блоков вычислительных устройств БВУ-6. предназначенных для приема, вычисления и выдачи информации в виде 32-разрядного последовательного кода и разовых команд во внешние системы объекта. Вычислитель также осуществляет контроль собственной работоспособности и контроль линий связи и неисправности информации от систем-датчиков.
Блок БВУ-6 имеет модульный принцип построения и включает в себя:
-
модуль процессора МПР-4-1 (процессор серии 1806, ПЗУ 5*4К 16 разрядных слов на микросхемах серии 533, 564, 556РТ7; ОЗУ 4К 16 разрядных слов на микросхемах серии 533, 564, 537РУЗА);
-
модуль ввода-вывода МВВ-11;
-
модуль ввода MBB-20;
-
модуль выдачи дискретных сигналов МВД-5;
-
модуль преобразователя напряжения сети МПС-3;
-
модуль стабилизации напряжения МСМ-5.
Модули состоят из одной или двух плат конструкции ARINC-600 с соединителем СНП34.
Кодовые сообщения, принимаемые и выдаваемые устройством, соответствуют ГОСТ 18977-79 и РТМ 1495-84 Система принимает следующие параметры:
от СВС: атекущее, Vп риборное, Vистинное, M Чабс Нотн Рвпп, Рст,Рдин, V^ max,
Мmax
от БИНС: Пх, Пу, nz, у, и, 0, W, Vy брн, Vy пот от РВ: Нист
от ILS/Cn: £курса ^глиссады
от ВСС (значения введенные с пульта ВСС): Нзад, V, L, G, Рпотребное,
Т АЭТОДРОМА, а0 ВПП, LвзЛЕТ, Цдо КОНЦА ВППП, LnPEPSAHHOrO ВЗЛЕТА,
разовые сигналы: шасси убраны, закрылки, тормоза включены, отказ двигателя и т.п.
-
Интегральная система предупреждения критических режимов (назначение, функции, выполняемые различными вычислительными системами).
Система предупреждения критических режимов (СПКР) выполняет основные функции предупреждения режимов сваливания, угла атаки (а) и перегрузок (n).
Поскольку система СПКР цифровая, она взяла функции определения скорости Vmax max, Vmin от ССОС, также на нее возложили функции предупреждения при разбеге и взлете.
Интегральная система предупреждения критических режимов разбита на несколько систем. Решение обеспечивает дистанционная система. Часть функций возложена на ВСУПТ - по крену, часть на СЭИ - показывает отклонение от заданного режима с помощью полочек и меток. Интегральная система предупреждения критических режимов реализуется в системе устойчивости и управляемости (ВСУ), загрузки руля, педалей, ограничения угла перегрузки и атаки. Она обеспечивает защиту режимов при параметрах полета эксплуатационных допусков. Если угол атаки (а) больше 22°, то данная система не будет выдавать сигнал на рули с САУ.
Все функции интегральной система предупреждения критических режимов обеспечивают следующие приборы и комплексы, изображенные на схеме:
ВСС обеспечивает ввод и расчет параметров при разбеге и взлете; СЭИ - система электронной индикации - визуальное отображение полученной информации;
САС - индикация в виде табло - работает в 2-х режимах - тактильном и постоянном.
АРО - аппаратура речевого оповещения.
-
Астрономические системы, применяемые в авиации (назначение, выполняемые функции, типы, характеристики, основное уравнение астронавигации).
До появления глобальных радионавигационных систем с мощной наземной поддержкой в авиации в ракетно-космической технике широко использовались астрономические средства коррекции навигационных параметров. Астронавигация относится к автономным средствам, ей не нужна наземная поддержка и в этом ее достоинство. Недостатком является то, что работа астросистемы зависит от погодных условий, т.е. в условиях видимости небесных светил. Учитывая это обстоятельство, гражданская авиация астрономических средств, практически не применяет повсеместно, за исключением самолетов, эксплуатируемых в полярных районах, где начальная выставка и определение курса затруднительно без использования небесных светил и созвездий. Для военной авиации, в частности для дальних стратегических бомбардировщиков, а также для межконтинентальных баллистических ракет и космических аппаратов астрономические системы находят широкое использование до настоящего времени, как эффективное средство коррекции траектории.
В настоящее время на самолетах АН-2, АН-24, ИЛ-12, АН-74, эксплуатируемых в полярных районах за 70-й широтой, используются переносные приборы астрокомпас АК-59 и астросекстант АС-2, которые входят в экипировку штурмана. На самолете АН-22 используется аст- роориентатор БЦ-63А, а на самолете АН-124 - астронавигационная система А-829.
Назначение астросистем.
Астрономические системы предназначены для определение астрономического курса или поправки к истинному курсу самолета по звездам в условиях ясного неба. Кроме того, астронавигационная система дополнительно к названной функции определяет астрономический курс АК или поправку к истинному курсу по солнцу при любых метеорологических условиях, а также определяет географические координаты самолета и производит счисление координат при взаимодействии с другими навигационными системами.
Принцип действия астросистем заключается в измерении углов места и азимутов светил при пеленговании их секстантами и организации автоматического слежения за ними, с последующим решением сферического треугольника. Вычислительное устройство по параметрам альманаха звезд, занесенного в память вычислителя, определяет поправку к приведенному к истинному меридиану курсу.
Принцип действия АНС
Определение координат места и курса самолета по одному светилу. При одновременном измерении высоты и азимута светила для определения географических координат места самолета используются следующие уравнения:
Sinh = siny-sind + cosycosS-cos(t2p +2);
CtgA=sin^'Ctg(tzp +2) - c0s^'tg3'c0sec(t2p +2), где А = ИК + КУ.
Место самолета определяется в точке пересечения круга равных высот светила h и линии равных азимутов светила А, которые пересекаются под прямым углом, обеспечивая максимальную точность определения места самолета по двум линиям положения. Практическая реализация этой точности осложняется тем. Что точное измерение КУ светила в принципе возможно, но азимут также зависит от точности определения ИК. Точное же измерение курса самолета проблематично. Так для определения места самолета с ошибкой не более 25 км курс необходимо с точностью не менее 20'.
Решение этой же задачи возможно по аргументам высоты и скорости ее изменения по формулам:
Sinh = smy-smd+cosy-cosd-cos(t2p +2);
Dh/dt = - cosycosd/cosh- siny (t2p +A)+Wcos(Ky-YC).
Для решения этой задачи необходимо обеспечить связь с ДИСС по W и по УС
Структурная
схема, объясняющая принцип действия
АНС
-
Астро-навигац ионная система АНС-3 (А-829) (назначение, состав, выполняемые функции, техническ ие характеристики).
Астронавигационная система (АНС) А-829 во взаимодействии с вычислительной системой самолетовождения, инерциальной системой, до- плеровским измерителем скорости и угла сноса, предназначена для автом ати ческого наведения и слежения за светилами, из мерения рассогласований по углу места h и по курсовому углу, для определения курса ночью при ясном небе по звезда м, определения курса днем и ночью в любую погоду по солнцу, а также для определения координат места самолета.
Структурная схема, объясняющая принцип действия АНС
А-826 Пульт
управления
Структурная
схема АНС А-829
ЗСП
- звездно-солнечный пеленгатор, РСП -
радиосолнечный пеленгатор, БУ-11 - блок
управления, БЭ-20 - блок электроники,
БПС - блок
преобразования
сигналов, ВУ-1 вычислительное устройство.
Принцип действия АНС А-829 показан на структурной схеме. В результате непрерывного счисления координат, в УВС по информации ДИСС и И-21 вырабатываются текущие координаты места самолета (ТКМС) ф* Л*ф*, которые выдаются в блок формирования углов наведения с другой стороны в этот же блок поступают параметры звезд азимут ai, и угол места 6i, которые хранятся в памяти вычислительного устройства, и гринвичское время Бгр. Эти же параметры могут быть введены вручную с использованием альманаха звезд. В блоке формирования углов наведения вычисляются углы наведения и выдаются в ЗСП и РСП, чувствительные элементы которых находятся в режиме автоматического слежения. Высота светила h и курсовой угол светила КУ по-
73
ступают в блок измерения отклонений Ah и ЛКУ, который эти данные выдает в блок обработки астрономических поправок, где вычисляются поправки к географическим координатам A ф и A Л к приведенному курсу A ф, которые затем используются для коррекции координат и курса в УВС.
На рис. 2 приведена структурная схема АНС. Функциональное назначение блоков.
ЗСП-2 обеспечивает захват и слежение за светилами по командам вычислителя и выдает сигналы рассогласования по высоте светила над горизонтом h и по курсовому углу между направлением визирной оси пеленгатора и направлением на светило.
Блок усиления БУ-11 производит усиление сигналов в дистанционных передачах, а также обеспечивает коммутацию, управление и электропитание АНС-3.
Блок электронный БЭ-2 формирует высоту и курсовой угол светила и выдает их в пеленгаторы ЗСП и РСП.
Блок преобразования сигналов БПС преобразует сигналы с СКТ и сигналы напряжения постоянного тока в последовательный двоичный код. Вычислительное устройство - вычисляет географические координаты и курс гироплатформы, вычисляет астрономические поправки к географическим координатам и курсу к высоте и азимуту светила, управляет электродвигателями цифровой следящей системы по высоте, азимуту светила и гироскопическому курсу, обеспечивает ввод информации от УВС и обеспечивает выдачу информации потребителям. Радиосолнечный пеленгатор А-829-10 выдает АКУ между равносигнальной зоной, формируемой антенной радиопеленгатора и плоскостью, проходящей через энергетический центр солнца и перпендикулярной истинному горизонту.
Основные технические данные: погрешность (2а) в определении
-
координат места положения ВС ±12 км;
-
курса ночью по звездам 8 угловых минут (5');
-
курса в режиме ЗСП по солнцу при высоте светила (0 - 45°) - 8', при высоте светила (45° - 70°) - 15';
-
курса в режиме РСП при высоте светила (0 - 45°) - 18', при высоте светила (45° - 70°) - 35';
-
наведение пеленгатора на светило обеспечивается при ошибке в курсе до 2° и ошибке в месте до 50 км;
-
продолжительность непрерывной работы - 12 часов;
-
время готовности к работе - 3 минуты;
-
потребляемая мощность - 250 Вт по постоянному току, 120 ВА по 36 В 400 Гц и 150 ВА по 115 В 400 Гц;
-
условия работы: высота полета до 15000 м, путевая скорость до 1300 км/час, крен и тангаж до ±20° для ЗСП и ±10° для РСП, угловая скорость по оси Х до 20 °/с, по осям У и Z до 5 °/с;
-
масса РСП - 23,1 кг, ЗСП - 43,1 кг.
Размещение на самолете АН-124: ЗСП расположен под пятигранным прозрачным обтекателем, выступающем над верхней обшивкой фюзеляжа, в районе центроплана ближе к кабине экипажа; РСП установлен под радиопрозрачным обтекателем, выступающим над верхней обшивкой фюзеляжа рядом с ЗСП, но ближе к центроплану. Электронные блоки расположены на рамах в герметичной части фюзеляжа в зоне установки ЗСП и РСП.
-
Радиотехническое оборудование навигации, посадки и управления воздушным движением (классификация по выполняемым функциям и по измеряемым параметрам, основное уравнение РТО).
Радиотехническое оборудование навигации, посадки и управления воздушным движением - обор-е обеспечив-е местоположение самолета в полете на маршруте, на взлете, при посадке, а также автоматическая передача данных наземным службам радиотехническим системам.
Классификация РТО приведена в таблице 1

Классификация РТО производится в соответствии с решаемыми задачами и выполняемыми функциями.
По выполняемым функциям аппаратура делится на:
-
аппаратуру связи, которая предназначена для приема и передачи сообщений по каналам радиосвязи, ведения переговоров между членами экипажа, регистрации этих переговоров. А также оповещения пассажиров и трансляции развлекательных программ в салоне;
-
аппаратура навигации служит для определения места ВС в пространстве, его путевой или полной скорости, а также для определения направления на характерные точки маршрута, в которых устанавливаются специальные радиостанции или радиомаяки;
-
аппаратура посадки используется для получения на борту информации о положении ВС в пространстве относительно заданной траектории снижении, заданной наземными радиомаяками;
-
аппаратура УВД устанавливается на ВС для повышения безопасности полета в виде самолетного ответчика УВД и в виде системы предупреждения столкновений.
Автономные устройства не требуют для своей работы внешних по отношению к ВС наземных, космических и других устройств и основаны на радиолокационном принципе.
Радиосредства ближнего действия работают в диапазоне ультракоротких волн с длиной волны менее 10 м. Эти волны не огибают земную поверхность, а распространяются по квазиоптическому закону. К этой аппаратуре относятся радиосредства ближней связи, ближней навигации, посадки, аппаратура УВД и бортовые метеорадиолокаторы. Дальность распространения радиоволн в УКВ диапазоне определяется из выражения:
Dmax = 4,1 (VН1 + VH2, где Н1 и Н2 высота установки передающей и приемной антенны. Для самолета эта формула может быть представлена в виде:
Dmax = 4,1 VНпол.м., где Нпол.м. - высота полета самолета в метрах Радиосредства дальнего действия работают на коротких, длинных и сверхдлинных волнах. В этих диапазонах радиоволн дальность действия зависит в основном от мощности излучаемой передающей радиостанции, состояния атмосферы, уровня внешних помех и чувствительности приемного устройства.
-
Распределение частотного диапазона радиоволн между бортовыми устройствами (возможное число радиосредств, работающих в различных диапазонах).
Между бортовыми устройствами происходит разделение частотного диапазона для предотвращения наложения одних сигналов на другие. Диапазон УКВ, включает сантиметровые, дециметровые и метровые волны. В этом диапазоне работают системы ближней связи, ближняя навигация, ДИСС, МНРЛС, радиовысотомеры системы УВД и системы посадки.
Достоинства диапазона - малый уровень внешних помех, независимость мощности и принимаемых параметров от времени суток и времени года, малые размеры антенны и большая ширина этого диапазона, большое количество каналов. Основной недостаток - ограниченная дальность прямой видимости. Однако ограничение дальности прямой видимости способствует уменьшению взаимных помех, так как зона перекрытия частот уменьшается.
Диапазон декаметровых волн (ДКМВ) или короткие волны (КВ) предназначен для радиостанций дальней связи. Достоинством этого диапазона является малое поглощение электромагнитной энергии и возможность построения достаточно эффективных бортовых антенн, что позволяет вести радиосвязь на расстоянии несколько тысяч километров при мощности передатчика, не превышающей 100 - 400 Вт. Для радионавигационных целей этот диапазон не используется из-за сильной зависимости электромагнитного поля в точке приема от состояния атмосферы, т.е. от времени суток и от времени года, кроме автоматического радиокомпаса АРК-УД для привода самолете на аварийную радиостанцию. В радиостанциях уменьшение этого влияния выполняется сменой несущей частоты.
Диапазон гектаметровых волн (ГКМВ) или средние волны (СВ) используется для автоматического радиокомпаса и для связи в полярных широтах, где радиосвязь в ДКМВ может нарушаться из-за ионосферных возмущений, связанных с солнечной активностью. Диапазон километровых и мириаметровых волн или длинные и сверхдлинные волны (ДВ и СДВ) принимается в радиотехнических системах дальней навигации. В этих диапазонах изменения параметров от времени суток и года поддаются расчету и прогнозу и учитываются при измерениях. Дальность РСДН определяется в основном мощностью наземных радиостанций и уровнем помех в точке приема.
Возможное число радиосредств, работающих в различных диапазонах радиочастот приведено в таблице 3
Радио
волна
Граничная
частота
Nрс
fmin
fmax
Мериаметр
3
30
5
Километр
30
300
54
Гектаметр
300
3000
540
Декаметр
3000
30000
5400
метровые
30000
300000
54000 Nрс=(fmax-fmin)/Дfрс
Afpc
- ширина
спектра излучаемого сигнала Рис. 2
Распределение частотного диапазона
радиоволн между бортовыми средствами:
см на следующей странице...
|
Основной тип волны сигнала |
УКВ |
КВ |
СВ |
ДВ |
СДВ Звуков. |
||||||
|
смв |
дмв |
MB |
ДКМВ |
ГКМВ |
клмв |
МРМВ |
|||||
|
Пространственная |
|
|
|
шшшш |
жшмш |
|
|
||||
|
Пространственный волновод |
|
|
|
|
|
|
шш |
||||
|
Поверхностная |
|
Ушш |
|
|
1 1 |
|
|
||||
|
Тропосферная |
|
|
|
|
|
|
|
||||
|
Атмосферные помехи |
|
|
|
|
|
1 1 |
w* |
||||
|
о о 7 О |
кг1 |
1 |
10 |
102 |
103 |
ю4 |
|
||||
|
f, МГц Инфракр. лучи Субмиллим. Миллиметровые 3000 ГГц 300 ГГц |
Сантиметровые 30000 |
Дециметровые 3000 |
Метровые 300 |
Декаметровые 30 |
Гектометровые 3 |
Километровые 0,3 |
Мириаметровые 0,03 0,003 |
||||
|
РСБС (Радиосистемы ближней связи) «Ландыш» 118...135,975, «Баклан» 118...135,975 |
|
§ |
|
|
|
|
|
||||
|
РСБС (Радиосистемы дальней связи) «Микрон» 2.0...23,9999, «Карат» 2,0...10,1, «Ядро» 2,0...17,9999 |
|
|
|
24 |
2, |
|
|
||||
|
1*1 |
|||||||||||
|
СО УВД (УВД) УВД прием 837,5...1030; передача 740, PBS УВД-M прием 1030; передача 1090 |
|
|
|
|
|
|
|
||||
|
РСБН (Радиосистемы ближней навигации) РСБН 772...1005, VOR 108...117,975, DME 962...1213,0 |
|
1005 772 I I |
117,9 108 I I |
|
|
Loran 0,1 | |
umeg 0,01 §§ °401 |
||||
|
РСДН (Радиосистемы дальней навигации) |
|
|
|
|
|
|
|
||||
|
СРНС (Спутниковая радионавигационная система) |
|
1,57 1230 | | Navstar |
|
|
|
|
|
||||
|
АРК АРК-15 150...1800 МГц |
|
|
|
|
|
|
|
||||
|
шшш |
|||||||||||
|
СП СП 50/68: КРП 108,3...110,3; ГРП 332,6...335; МРП 75 СП-70/ILS: КРП 108...112; ГРП 328,6...335,4; МРП 75 MLS: КРП 503...5090,7; ГРП 503...5090,7; DME-P 960...1215 МГц |
|
328,5 ГРМ | |
108 КРМ | |
|
|
|
|
||||
|
РВ-5: 4,5ГГц |
4,3 РВ-5 1 |
|
|
|
|
|
|
||||
|
ДИСС-013: 8,8ГГц |
8,8 ДИСС-0,13 | |
|
|
|
|
|
|
||||
|
МНРЛС: «Гроза» 9,37ГГц |
9,37 «Гроза» | |
|
|
|
|
|
|
||||
|
СПС «Эшелон» |
|
1602,5 | | 1591,5 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||
00
о
-
Общие параметры РТО (надежность, контролепригодность, масса, объем, потребляемая мощность, стоимость).
Эффективность ВС является функцией общих параметров бортового оборудования. К общим параметрам относятся: надежность, контролепригодность, масса, объем, потребляемая мощность, стоимость жизненного цикла оборудования, возможность оптимальной компоновки оборудования и антенн.
Надежность оценивается вероятностью безотказной работы и средним временем наработки оборудования до отказного состояния Тср = (0,577 + In п)Тсрэл., где n - количество резервных элементов. Po(to) = 1 - [1 - exp( - A to)]n
Контролепригодность - способность к проведению контроля (встроенного контроля ВСК), включая точки подсоединения генераторов стимулирующих сигналов. ВСК являются основным средством контроля на борту ВС. Они определяю выход основных параметров за пределы допусков, сигнализируя о неисправности оборудования до уровня сменного блока. Глубина контроля характеризует качество ВСК. q = In Pk/P1, где Рк и Р1 - вероятность безотказной работы контролируемых элементов и всего оборудовании конкретного типа в целом.
Для резервированных систем вероятность безотказной работы с учетом глубины контроля ВСК определяется выражением:
Рп = Рр(2 - Ppq), где Рр - вероятность безотказной работы резервированного устройства.
С увеличением глубины контроля снижается вероятность использования неисправного оборудования
Р = 1 - P1-q Современное бортовое оборудование имеет глубину контроля q = 0,8 - 0,85.
Масса бортового оборудования. Увеличение массы БО приводит при постоянной взлетной массе ВС к необходимости к изменению полетной нагрузки либо к увеличению запаса топлива.
Объем оборудования влияет на объем перевозимого полезного груза и на количество пассажирских мест.
Мощность, потребляемая бортовым оборудованием, для современных самолетов находится в следующем соотношении: 1 кВТ мощности примерно соответствует 1кг массы.
Стоимость жизненного цикла. Стоимость бортового оборудования примерно равна от 25% до 50% стоимости ВС. По некоторым зарубежным источникам стоимость 1кг оборудования в среднем равна 4500 $, что на порядок превышает стоимость конструкции.
-
Автоматические радиокомпасы (назначение, требования ЕНЛГС, типы, выполняемые функции).
Радиокомпас предназначен для установки на самолеты в качестве навигационного средства и обеспечивают в режиме автоматического пеленгования заход на посадку по наземным приводным и широковещательным радиостанциям, в том числе по системе обеспечения слепой посадки.
Требования:
При полете над приводной радиостанцией зона АРК не д.б. больше высоты полета. Если АРК является резервным средством навигации- допускается увеличение зоны неустойчивой работы АРК до1,5*Н. Если АРК является резервным прибором, тогда высокой точности можно не ожидать.
-
Радиокомпас должен обеспечивать совместно с другим оборудованием:
-
получение непрерывного отсчета курсового угла радиостанции (КУР) и выдачу информации об отказах для визуальной индикации экипажу и в виде электрических сигналов в другое бортовое оборудование, если эти сигналы используются;
-
осуществление полета на радиостанцию и от нее;
-
определение пеленга на радиостанцию и от нее;
-
выдачу сигналов опознавания наземных радиостанций.
-
На удалениях от радиостанции, где напряженность поля сигнала составляет 70 мкВ/м, погрешность по КУР должна быть не более ±3° на КУР = 0° и 180°; и ±5° на остальных КУР.
-
При пролете над приводной радиостанцией зона неустойчивой работы АРК не должна превышать высоты полета.
Радиокомпасы работают обычно в области длинных и средних волн (100 - 2000 кГц). Точность определения курсового угла составляет ±(2 - 3°) и дальность действия 300 - 500 км
В основу принципа действия радиокомпаса положено использование направленного приема электромагнитной энергии. Для этого на входе радиокомпаса включается антенна, обладающая резко выраженным направлением нулевого приема. Такой антенной является рамочная антенна. Амплитуда выходного сигнала рамочной антенны зависит от направления прихода радиоволн. Фаза антенного сигнала для направлений приема, расположенных в левой и правой полуплоскостях, отличается на 180°, что позволяет однозначно определять направление на пеленгуемою радиостанцию.
Все радиокомпасы, как отечественные, так и зарубежные, построены по классической схеме с балансной модуляцией и работают в одном из 3-х режимов: режим автоматического пеленгования «Компас», режим приема сигналов на направленную антенну «Рамка» и режим приема сигналов на ненаправленную антенну «Антенна».
Работа АРК основана на том, что в нем происходит сложение сигналов пеленгуемой радиостанции, принятых обеими антеннами, и коммутация сигнала рамки с частотой опорного генератора, в результате чего напряжение на входе приемника оказывается промодулиро- ванным по амплитуде. Сравнивая напряжения на выходах приемника и опорного генератора, вырабатывается сигнал ошибки, который поступает в следящую систему. Следящая система автоматически поворачивает рамку в положение минимума сигнала с рамки, совпадающее с направлением на пеленгуемую радиостанцию. Угол поворота рамки посредством электрической дистанционной передачи сообщается стрелочному индикатору курсового угла радиостанции.
Рис.
5 Обобщенная структурная схема
автоматического радиокомпаса
-
Автоматические радиокомпасы АРК-22 и АРК-25 (основные технические характеристики).
Радиокомпас типа АРК-25 предназначен для установки на самолеты в качестве навигационного средства и обеспечивают в режиме автоматического пеленгования заход на посадку по наземным приводным и широковещательным радиостанциям, в том числе по системе обеспечения слепой посадки.
Радиокомпас работает в международном диапазоне частот, основные характеристики удовлетворяют требованиям ICAO и ARINC.
Основные технические характеристики:
|
Диапазон частот, кГц |
150...1750 |
|
Дискретность настройки, кГц |
0,5 |
|
Погрешность определения КУР, град., не более |
±2 |
|
Предельная чувствительность, мкВ/м |
25 |
|
Избирательность, дБ |
80 |
|
Выходная мощность звукового сигнала, мВт |
100 |
|
Скорость индикации, град./с |
30 |
|
Количество предварительно записываемых частот настройки |
38 |
|
Напряжение питания переменного тока частотой 400 Гц, В |
115 |
|
Масса, кг |
3,9 |
|
Рабочий температурный диапазон, °С |
- 6 0 6 0 |
|
Допустимая влажность при 40°С, % |
98 |
-
Радиотехнические системы ближней навигации РСБН (назначение, требования ЕНЛГС, типы, выполняемые функции, структурная схема взаимодействия наземной и бортовой аппаратуры)
РСБН предназначена для формирования и выдачи потребителю навигационных параметров, необходимых для управления летательными аппаратами в различных режимах полета и для индикации положения летательного аппарата относительно навигационных точек, а так же для позиционной коррекции инерциальных систем и вычислителей НПК.
Для решения указанных задач РСБН обеспечивает:
-
определение и выдачу потребителю в режиме «навигация» азимута А и наклонной дальности Д относительно наземных маяков всенаправленного и направленного типов;
-
определение и выдачу потребителям а реж «посадка» наклонной дальности Д до ретранслятора дальномера и угловых отклонений £к, £г от равносигнальных зон курсового и глиссадного радиомаяков посадочной группы типа (например ILS);
-
формирование и выдачу по радиолинии «борт-земля» сигналов «опознавание» для индикации местоположения летательного аппарата на индикаторе кругового обзора наземного навигационного радиомаяка. -выполнение полетов по любой окружности заданного радиуса с центром в точке расположения радиомаяка РСБН;
-
выполнение полетов по любому линейно- ломанному маршруту, не проходящему через радиомаяк РСБН, с помощью БЦВМ;
-
приведение самолета в любую заданную точку маршрута с указанием моментов подхода к ней и ее пролета
Требования:
-РСБН должна обеспечивать в зоне действия радиомаяков определение дальности самолета с точностью необходимой для самолетовождения по установленным воздушным корридорам -дальность действия РСБН д.б. не меньше:
Д=0,75*[4.12(л/я! + л/я2)]
Д - дальность, км;
H1 - высота установки антенны наземного радиомаяка, м;
H2 - высота полета самолета, м;
0,75 - безразмерный коэффициент;
-
- масштабный коэффициент радиогоризонта в км/м Различают по типу информативного параметра сигнала, используемого для определения азимута, по формату сигнала, а также по структуре в целом.
Структурная схема взаимодействия бортовой аппаратуры РСБН с наземным оборудованием
-
РСБН - угломерно-дальномерная
-
VOR - угломерная
-
DME - дальномерная
|
|
ИДР |
|
|
|
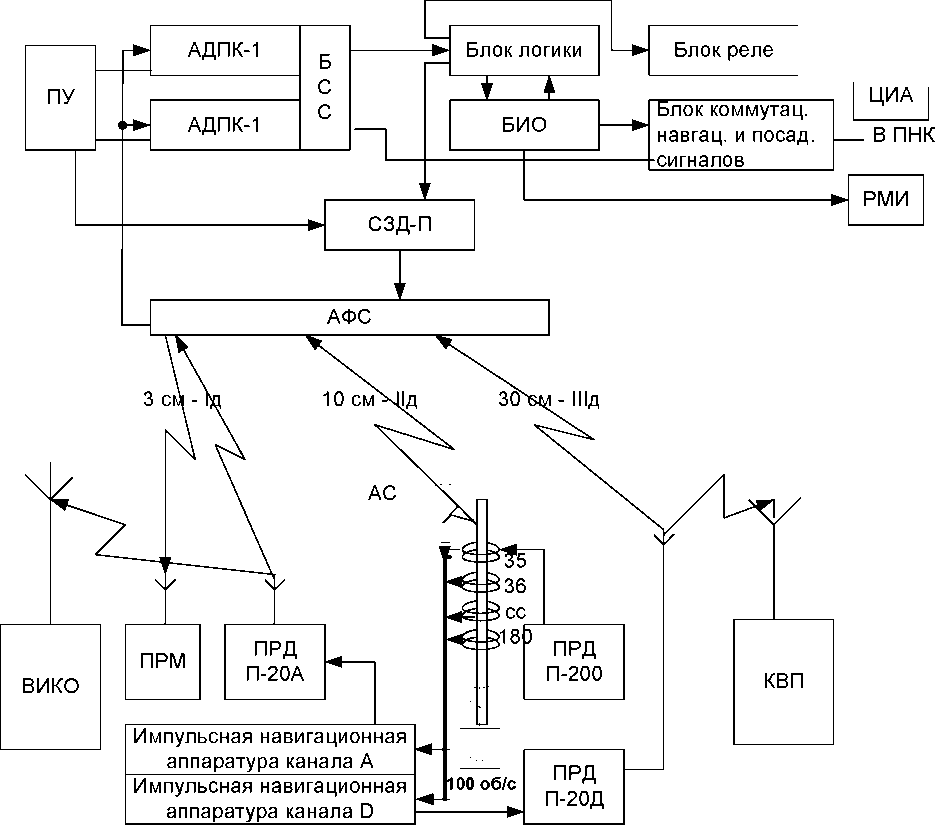
ПУ-пульт управления, АДПК-азимутально-дальномерный приемный канал, СЗД-самолетный запросчик дальности, БСС-блок согласования сигналов, АФС-антенно-фидерная система, БИОблок измерения и обработки, ИДР-индикатор дальности, ЦИА-цифровой индикатор азимута, РМИ-радиомагнитный индикатор, ВИКО-выносной индикатор кругового обзора, КВП-командный
выносной пункт, ПРМ-приемник, ПРД-передатчик
Определение
места ВС в угло- мерно-дальномернй РСБН
С-северное направление меридиана
РМ-радиомаяк
А-азимут
Д-дальность
-
РСБН А-331 и РСБН-85 (основные технические характеристики).
Унифицированная бортовая модульная радионавигационная аппаратура ближней навигации и посадки А-331 предназначена для формирования и выдачи потребителю навигационных параметров, необходимых для управления летательными аппаратами в различных режимах полета и для индикации положения летательного аппарата относительно навигационных точек, а так же для позиционной коррекции инерциальных систем и вычислителей НПК.
Для решения указанных задач РСБН А-331 обеспечивает:
-
определение и выдачу потребителю в режиме «навигация» азимута А и наклонной дальности Д относительно наземных маяков всенаправленного и направленного типов;
-
определение и выдачу потребителям а реж «посадка» наклонной дальности Д до ретранслятора дальномера и угловых отклонений £к, £г от равносигнальных зон курсового и глиссадного радиомаяков посадочной группы типа ILS;
-
формирование и выдачу по радиолинии «борт-земля» сигналов «опознавание» для индикации местоположения летательного аппарата на индикаторе кругового обзора наземного навигационного радиомаяка. Аппаратура работает в дециметровом диапазоне волн с радиомаяками типа РСБН.
А-331 состоит: азимутально-дальномерный приемник, самолетный запросчик дальномера, вычислительная машина, устр-во защиты - преобразователь напряжения.
Основн. Техн. Хар-ки:
|
Диапазон частот, Гц |
772-1003 |
|
Число частотно-кодовых каналов, не более: В реж «навигация» В реж «посадка» |
6 70 |
|
Дальность действия аппаратуры (в зависимости от высоты полета), км, не более |
450 |
|
Погрешность измерения азимута, град |
0,25 |
|
Точность |
0,25+4/D |
|
Напряжения питания переменного тока частотой 400 Гц, В |
115 |
|
Суммарная потребляемая мощность, ВА, не более |
350 |
|
Масса аппаратуры, кг, не более |
350 |