

Бортовые вычислительные комплексы / экзамен / 11 Обзорно сравнительные НК
.docРАЗДЕЛ 11. ОБЗОРНО-СРАВНИТЕЛЬНЫЕ
РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ

Рис. 11.1. Смещение эталонной и текущей карт местности при отклонении ЛА
от заданной траектории

Рис. 11.2. Обобщенная структурная схема обзорно-сравнительной системы
Особенности формирования ЭКМ. Точность ОСС зависит от степени достоверности и детальности ЭКМ, которую получают с помощью радиолокаторов, установленных на ИСЗ; аэросъемки местности; детальных топографических карт и других источников информации. Как правило, ЭКМ представляют собой матрицу из ячеек, содержащих кодированную информацию об элементарном участке местности. Минимальный размер ячейки ЭКМ определяется разрешающей способностью бортового датчика ТКМ, а записанное в нее число – динамическим диапазоном изменения измеряемого датчиком параметра и принятым уровнем квантования сигнала этого датчика. Чем меньше размеры ячейки (чем выше разрешающая способность датчика) и уровень квантования, тем более подробной будет эталонная карта и тем выше потенциальная точность ОСС. Однако при большой протяженности маршрута, для которого составляется эталонная карта, и большой детальности последней требуется большой объем памяти ЭВМ ОСС. Поэтому при выборе параметров ЭКМ исходят из компромисса между требуемой точностью и объемом памяти системы. Одни из таких компромиссных подходов заключается в том, что в качестве основного навигационного средства используется система счисления пути ССП, а ОСС служит для коррекции этой системы на отдельных участках траектории полета.
В зависимости от вида текущей карты местности различают два основных типа ОСС навигации: по рельефу местности и по картам местности.
11.2. Система навигации по рельефу местности
Принцип действия
системы навигации по рельефу местности.
Эти ОСС основаны на том, что каждому
участку суши соответствует свой
неповторимый характер изменения высот
(рис. 11.3,а). Высота полета ЛА может быть
определена барометрическим высотомером
(![]() )
или радиовысотомером (
)
или радиовысотомером (![]() ).
Высота
).
Высота
![]() отсчитывается от некоторого заранее
выбранного уровня, например, от уровня
мирового океана, а радиовысотомер
измеряет профиль
отсчитывается от некоторого заранее
выбранного уровня, например, от уровня
мирового океана, а радиовысотомер
измеряет профиль
![]() относительно точки, находящейся под
ЛА.
относительно точки, находящейся под
ЛА.
Профиль участка
местности характеризуется функцией
![]() .
Для работы ОСС выбирается контрастный
по рельефу участок местности, протяженность
.
Для работы ОСС выбирается контрастный
по рельефу участок местности, протяженность
![]() которого определяется значением
возможного отклонения ЛА вдоль траектории
полета при навигации по системе счисления.
которого определяется значением
возможного отклонения ЛА вдоль траектории
полета при навигации по системе счисления.

Рис. 11.3. Формирование ТКМ и ЭКМ в системе навигации по рельефу
Принцип формирования
карт местности.
Для получения цифровой карты местности
участок протяженностью
![]() делится на отрезки длиной
делится на отрезки длиной
![]() ,
где
,
где
![]() – скорость полета, а
– скорость полета, а
![]() – интервал дискретизации по времени.
При этом функция квантуется по уровню
(
– интервал дискретизации по времени.
При этом функция квантуется по уровню
(![]() ).
).
С учетом сказанного
ТКМ (профиль рельефа) представляет собой
одномерную карту (рис. 11.3,б), имеющую вид
одной строки матрицы ЭКМ (рис. 11.3,в).
Поперечный размер
![]() эталонной карты выбирается в соответствии
в возможным боковым отклонением ЛА от
заданной траектории из-за погрешностей
системы счисления за время от предыдущей
коррекции.
эталонной карты выбирается в соответствии
в возможным боковым отклонением ЛА от
заданной траектории из-за погрешностей
системы счисления за время от предыдущей
коррекции.
При рассмотренном
способе требуется большой объем памяти
для хранения эталонного изображения и
большой объем вычислений, возрастающий
с увеличением числа уровней квантования.
Объем памяти и число вычислительных
операций радикально снижают, применяя
бинарное квантование (![]() )
сигнала
)
сигнала
![]() (рис. 11.4,а). При этом несколько уменьшается
точность местоопределения. Для получения
бинарно-квантованного изображения
сначала формируют сигнал
(рис. 11.4,а). При этом несколько уменьшается
точность местоопределения. Для получения
бинарно-квантованного изображения
сначала формируют сигнал
![]() ,
соответствующий среднему наклону
местности, а затем определяют отклонение
,
соответствующий среднему наклону
местности, а затем определяют отклонение
![]() высот рельефа от
высот рельефа от
![]() (рис. 11.4,б). Сигнал
(рис. 11.4,б). Сигнал
![]() квантуется на два уровня (рис. 11.4,в):
квантуется на два уровня (рис. 11.4,в):

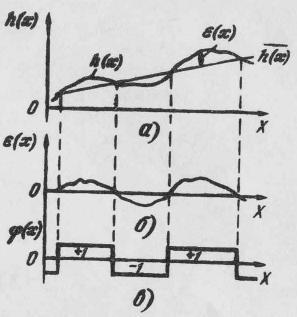
Рис. 11.4. Бинарно-квантованный сигнал, характеризующий отклонение
от среднего наклона местности
Структурная
схема системы навигации по рельефу
местности.
Приведенные к одному масштабу сигналы
с выходов барометрического высотомера
БВ и радиовысотомера РВ (рис. 11.5) поступают
на вычитающее устройство, которое
формирует сигнал
![]() .
Этот сигнал подается на ЭВМ ОСС,
программное обеспечение которой
формирует карту местности (ФТКМ), выбирает
соответствующую участку коррекции
эталонную карту (ДЭКМ) и выполняет
корреляционную обработку сформированных
карт (Кор). Корректирующие сигналы УС3
для системы счисления пути ССП вырабатывает
навигационная ЭВМ (НЭВМ). Сигналы УС1
служат для выбора эталонной карты, а
сигналы УС2 необходимы для формирования
ТКМ. При необходимости на НЭВМ может
также подаваться внешняя информация
от бортовых систем ЛА. Сигналы на систему
автоматического управления (САУ) могут
сниматься либо с ССП, либо с НЭВМ.
.
Этот сигнал подается на ЭВМ ОСС,
программное обеспечение которой
формирует карту местности (ФТКМ), выбирает
соответствующую участку коррекции
эталонную карту (ДЭКМ) и выполняет
корреляционную обработку сформированных
карт (Кор). Корректирующие сигналы УС3
для системы счисления пути ССП вырабатывает
навигационная ЭВМ (НЭВМ). Сигналы УС1
служат для выбора эталонной карты, а
сигналы УС2 необходимы для формирования
ТКМ. При необходимости на НЭВМ может
также подаваться внешняя информация
от бортовых систем ЛА. Сигналы на систему
автоматического управления (САУ) могут
сниматься либо с ССП, либо с НЭВМ.

Рис. 11.5. Структурная схема системы навигации оп рельефу местности
Корреляционная обработка сигналов, соответствующих ТКМ и ЭКМ, производится путем поэлементного сравнения карт, в результате чего выбирается соответствующая строка эталонной карты, по положению которой относительно центральной строки сначала определяется поперечное смещение ЛА, а затем сдвиг карт по оси X.
Алгоритмы корреляционной обработки. Мерой совпадения оцифрованных изображений служит нормированная КФ или связанная с КФ функция. Соответствующие корреляционные алгоритмы сравнения выбирают исходя из минимума требуемых для вычисления КФ операций.
Одна из групп
простых цифровых корреляционных
алгоритмов основана на использовании
парных функций
![]() ,
представляющих собой число пар элементов
(ячеек) с уровнями квантования
,
представляющих собой число пар элементов
(ячеек) с уровнями квантования
![]() и
и
![]() ,
совпадающих при данном сдвиге
,
совпадающих при данном сдвиге
![]() и
и
![]() .
Самые простые – алгоритм суммирования
парных функций, при котором вычисляется
аналог нормированной КФ:
.
Самые простые – алгоритм суммирования
парных функций, при котором вычисляется
аналог нормированной КФ:
![]() , (11.1)
, (11.1)
где
![]() – число уровней квантования, а
– число уровней квантования, а
![]() – число ячеек карты, и алгоритм
перемножения парных функций:
– число ячеек карты, и алгоритм
перемножения парных функций:
 , (11.2)
, (11.2)
где
![]() – число ячеек эталонного изображения
с уровнем квантования, равным
– число ячеек эталонного изображения
с уровнем квантования, равным
![]() .
.
При бинарном
квантовании (![]() )
возможны четыре типа парных функций
(рис. 11.6), которые составляют матрицу
)
возможны четыре типа парных функций
(рис. 11.6), которые составляют матрицу
![]() ,
,
где для упрощения
записи принято
![]() .
Тогда алгоритмы (11.1) и (11.2) принимают вид
.
Тогда алгоритмы (11.1) и (11.2) принимают вид
![]() ; (11.3)
; (11.3)
![]() (11.4)
(11.4)
где
![]() и
и
![]() – число ячеек карты, содержащих 0 и 1
соответственно, а
– число ячеек карты, содержащих 0 и 1
соответственно, а
![]() .
.

Рис. 11.6. Парные функции при бинарном квантовании
Поясним сказанное
на примере сравнения бинарно-квантованных
эталонной ЭКМ и текущей ТКМ карт,
содержащих
![]() ячеек и сдвинутых на
ячеек и сдвинутых на
![]() (рис.
11.7). При указанном сдвиге изображений
все парные функции равны 2, а функции
(рис.
11.7). При указанном сдвиге изображений
все парные функции равны 2, а функции
![]() и
и
![]() .
Сдвигая ЭКМ относительно ТКМ, добиваются
максимального значения функций
.
Сдвигая ЭКМ относительно ТКМ, добиваются
максимального значения функций
![]() и
и
![]() ,
равного 1. Дальнейший сдвиг изображений
приведет к уменьшению
,
равного 1. Дальнейший сдвиг изображений
приведет к уменьшению
![]() и
и
![]() .
.
Ширина главного
пика функций
![]() и
и
![]() зависит от дискрета
зависит от дискрета
![]() .
Поэтому точность определения сдвига
.
Поэтому точность определения сдвига
![]() (а следовательно, и отклонения ЛА от
заданной точки траектории) тем выше,
чем меньше
(а следовательно, и отклонения ЛА от
заданной точки траектории) тем выше,
чем меньше
![]() .
Нетрудно заметить, что алгоритм (11.4)
лучше (11.3), так как боковые лепестки
функции
.
Нетрудно заметить, что алгоритм (11.4)
лучше (11.3), так как боковые лепестки
функции
![]() имеют меньший уровень, чем при использовании
алгоритма (11.3). Уровень боковых лепестков
можно снизить, усложнив корреляционный
алгоритм.
имеют меньший уровень, чем при использовании
алгоритма (11.3). Уровень боковых лепестков
можно снизить, усложнив корреляционный
алгоритм.

Рис. 11.7. Сравниваемые карты местности (а) и аналоги их нормированной КФ (б)
Точность системы навигации по рельефу местности. Расчеты показывают, что погрешность определения местоположения составляет 0,6 размера соответствующей стороны ячейки. Наилучшая точность достигается на малых высотах полета. Рассматриваемые системы малоэффективны при больших высотах полета ЛА и малом контрасте (перепаде высот) рельефа местности.
11.3. Системы навигации по картам местности
Принцип действия систем навигации по картам местности. При полете над равнинной местностью или на больших высотах целесообразно применять в качестве датчиков ОСС импульсные радиолокаторы. Образуемые при этом ОСС относятся к системам навигации по картам местности, так как ТКМ и ЭКМ являются обычно двумерными.
В простейшей
системе подобного рода ДНА радиолокатора
направляется в сторону земной поверхности
(рис. 11.8,а). Местность характеризуется
специфическим расположением отражающих
электромагнитную энергию объектов в
пределах отражающей площадки ОП (рис.
11.8,б). Мощность отраженного от этих
объектов сигнала
![]() зависит от вида отражающих объектов
(рис. 11.8,в). Для составления текущей карты
местности (рис. 11.8,г) полученный сигнал
квантуется по уровню и дискретизируется
по дальности (по времени). Значение
дискрета зависит от разрешающей
способности радиолокатора по дальности
зависит от вида отражающих объектов
(рис. 11.8,в). Для составления текущей карты
местности (рис. 11.8,г) полученный сигнал
квантуется по уровню и дискретизируется
по дальности (по времени). Значение
дискрета зависит от разрешающей
способности радиолокатора по дальности
![]() .
Сформированная ТКМ в данном случае
подобна используемой в системе навигации
по картам местности.
.
Сформированная ТКМ в данном случае
подобна используемой в системе навигации
по картам местности.
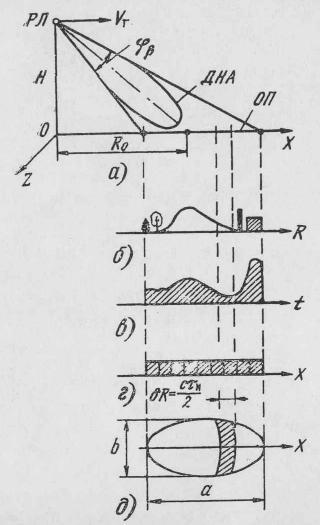
Рис. 11.8. Формирование ТКМ в системе навигации по картам местности
Для нахождения пространственного положения ЛА применяют антенную систему, формирующую в общем случае пять лучей (рис. 11.9). Лучи 1–4 служат для получения текущей карты местности, а луч 5 – для измерения высоты полета. Последняя необходима для преобразования наклонной дальности, измеряемой радиолокатором, в горизонтальную дальность, которой соответствует ЭКМ. Избыточное число лучей (пять вместо трех), а следовательно, и избыточное число измерений способствует повышению точности.
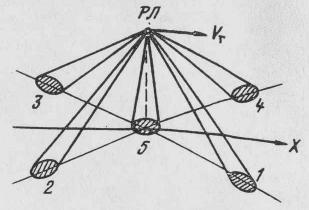
Рис. 11.9. Схема расположения лучей антенной системы радиолокатора
Сигналы по каждому из лучей используются для получения линейного изображения местности. Поэтому корреляционная обработка изображений может выполняться по алгоритмам, аналогичным (11.1) и (11.2).
Основной недостаток системы – неудовлетворительная работа при малых высотах полета, на которых отдельные неровности местности маскируют детали рельефа (область радиолокационной тени), что приводит к снижению контрастности ТКМ. Для восстановления работоспособности системы на малых высотах можно использовать информацию только от луча 5. При этом система превращается в ранее рассмотренную систему навигации по рельефу местности. Существенно, что такой режим работы может быть реализован без перестройки как аппаратуры системы, так и ее программного обеспечения.
Структурная схема системы навигации по картам местности. Полученные от радиолокатора РЛ (рис. 11.10) сигналы поступают в устройство обработки УО, где они подвергаются предварительной фильтрации для выделения высотомерного сигнала, принятого по лучу 5. Этот сигнал направляется в устройство определения высоты УОВ, в котором в результате совместной его обработки с сигналом высоты от инерциальной навигационной системы ИНС вычисляется точное значение высоты полета.

Рис. 11.10. Структурная схема системы навигации по картам местности
Радиолокационные сигналы в АЦП дискретизируются по дальности и квантуются по амплитуде. Возможно как многоуровневое квантование амплитуды (обычно на три-четыре уровня), так и бинарное. Выбор числа уровней квантования определяется требуемой точностью и вычислительными возможностями системы. В преобразователе дальности ПД полученная цифровая ТКМ приводится к горизонтальной дальности, для чего используется значение высоты полета с УОВ. Следующим этапом обработки является цифровое интегрирование в ЦИ, с помощью которого увеличивается значение отношения мощности сигнала к мощности шума. Интегрированию подвергаются несколько последовательно принимаемых отраженных сигналов. В заключение полученное изображение сравнивается с эталонной картой местности ЭКМ в корреляторе Кор, по данным которого в устройстве УОМ определяется пространственное местоположение МЛА.