

8.7. Астрономические компасы
8.7.2. Методы астрономического измерения курса
Астрономическое измерение курса выполняется двумя способами:
– использованием плоскости пеленгации, совпадающей с вертикалом светила (горизонтальные АК);
– применением плоскости пеленгации, совпадающей с кругом склонения светила (экваториальные АК).
Первый способ, характерный для горизонтальных АК, сводится к следующему (рис. 8.8):
– вращая плоскость пеленгации вокруг вертикальной оси, совмещают ее с центром небесного тела и его вертикалом;
– измеряют курсовой
угол светила
![]() между плоскостью симметрии ЛА и плоскостью
пеленгации, отсчитываемый по часовой
стрелке;
между плоскостью симметрии ЛА и плоскостью
пеленгации, отсчитываемый по часовой
стрелке;
– вычисляют азимут
![]() светила;
светила;
– находят истинный курс по формуле
![]() . (8.12)
. (8.12)

Рис. 8.8. Астрономическое измерение курса
Определение азимута выполняется двумя методами: аналитическим и путем моделирования небесной сферы.
Аналитическое определение основывается на формулах сферической тригонометрии
![]() ,
,
![]() . (8.13)
. (8.13)
Поделив первое уравнение на второе, получим формулу для вычисления азимута
![]() , (8.14)
, (8.14)
где
![]() ,
,
![]() ,
,
![]() – задаются.
– задаются.
При использовании
метода моделирования небесной сферы
азимут
светила вычисляется с помощью специального
кинематического вычислителя – сферанта
(рис. 8.9), воспроизводящего в пространстве
параллактический треугольник: полюс
мира
![]() ,
зенит
,
зенит
![]() ,
место светила
,
место светила
![]() .
Вводимыми данными являются текущие
значения
.
Вводимыми данными являются текущие
значения
![]() ,
,
![]() ,
,
![]() и
и
![]() .
.

Рис. 8.9. Упрощенная кинематическая схема сферанта горизонтального астрокомпаса:
1 – часовой механизм; 2, 5, 7 – скобы; 3 – кольцо; 4 – крест; 6 – потенциометр;
![]() –
угловая скорость вращения Земли
–
угловая скорость вращения Земли
8.7.3. Горизонтальный астрокомпас
Астрокомпас ДАК-ДБ – это автоматический прибор, основанный на пеленгации Солнца. Он является универсальным компасом, измеряющим истинный и ортодромический курсы, что особенно важно для выполнения дальних полетов по кратчайшему расстоянию. Предусмотрена связь астрокомпаса с перископическим секстантом, позволяющим измерять истинный и ортодромический курсы в ночных условиях, путем визуальной пеленгации звезд через секстант. Прибор рассчитан на совместную работу с навигационным автоматом и единой курсовой системой, однако ввод координат местонахождения самолета и географического места светила производится вручную. В комплект прибора входят: датчик курсовых углов, блок усилителей, вычислитель, путевой корректор и указатель курса. Функциональная схема астрокомпаса представлена на рис. 8.10.

Рис. 8.10. Функциональная схема астрокомпаса ДАК-ДБ:
1 – пеленгаторная головка, 2 – усилитель, 3 – тахогенератор, 4 – двигатель, 5 – указатель,
6 – вычислитель азимута, 7 – тангенсный
механизм (вычисление
![]() ),
),
8 – множительный механизм, 9 – датчик углов наклона пеленгаторной головки,
10 – маятниковый механизм, 11 – путевой корректор
На этой схеме
пеленгаторная головка 1, усилитель 2,
тахогенератор 3 и двигатель 4 образуют
следящую систему, которая автоматически
совмещает плоскость пеленгации с
вертикалом светила. Вычислитель,
используя заданные углы
![]() ,
,
![]() ,
,
![]() и
и
![]() ,
дает на выходе азимут
,
дает на выходе азимут
![]() светила. Маятниковый механизм 10 с помощью
датчика угловых величин 9 определяет
угол наклона
светила. Маятниковый механизм 10 с помощью
датчика угловых величин 9 определяет
угол наклона
![]() плоскости пеленгации относительно
вертикала светила. Величина этого угла,
умноженная с помощью механизма 8 на
плоскости пеленгации относительно
вертикала светила. Величина этого угла,
умноженная с помощью механизма 8 на
![]() (
(![]() вырабатывается тангенсным механизмом
7 по сигналам, соответствующим высоте
светила
вырабатывается тангенсным механизмом
7 по сигналам, соответствующим высоте
светила
![]() ,
получаемой из вычислителя 6), образует
поправку
,
получаемой из вычислителя 6), образует
поправку
![]() .
В результате сложения углов
.
В результате сложения углов
![]() и
и
![]() получается курсовой угол
получается курсовой угол
![]() ,
в котором погрешность от наклона
пеленгаторной головки компенсируется.
Указатель 5 воспроизводит измеренный
курс
,
в котором погрешность от наклона
пеленгаторной головки компенсируется.
Указатель 5 воспроизводит измеренный
курс
![]() .
.
Структурная электрическая схема астрокомпаса ДАК-ДБ приведена на рис. 8.11.
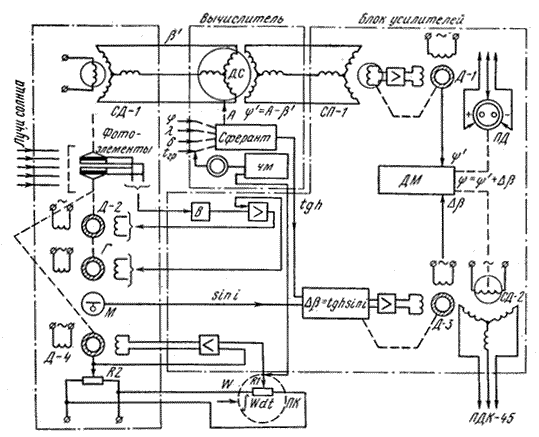 Рис.
8.11. Структурная электрическая схема
астрокомпаса ДАК-ДБ:
СД-1 – сельсин-датчик;
Д-2 – двигатель отработки; Г – генератор;
М – кренокорректор;
Рис.
8.11. Структурная электрическая схема
астрокомпаса ДАК-ДБ:
СД-1 – сельсин-датчик;
Д-2 – двигатель отработки; Г – генератор;
М – кренокорректор;
Д-4 – двигатель пеленгаторной головки;
R2 – потенциометр; ДС – дифференциальный
сельсин;
![]() – широта;
– широта;
![]() – долгота;
– долгота;
![]() – склонение светила;
– склонение светила;
![]() – гринвичский угол светила; ЧМ –
часовой механизм; ПК – путевой корректор;
СП-1 – сельсин-приемник;
– гринвичский угол светила; ЧМ –
часовой механизм; ПК – путевой корректор;
СП-1 – сельсин-приемник;
ДМ – дифференциал механический; Д-1 – двигатель отработки;
ПД – потенциометрический датчик; Д-3 – двигатель отработки;
СД-2 – сельсин-датчик; ПДК-45 – датчик курса
Погрешности
горизонтальных астрокомпасов.
Методические погрешности возникают
вследствие неточного вычисления азимута
![]() и измерения курсового угла
и измерения курсового угла
![]() светила;
светила;
– погрешность
![]() вызвана ошибками введения координат
местонахождения
вызвана ошибками введения координат
местонахождения
![]() и
и
![]() в вычислитель азимута;
в вычислитель азимута;
– креновая
погрешность
![]() возникает при наклонах плоскости
пеленгации, вызванных углами крена
возникает при наклонах плоскости
пеленгации, вызванных углами крена
![]() и тангажа
и тангажа
![]() ЛА;
ЛА;
– погрешность измерения ортодромического курса может возникнуть вследствие отклонения оси вращения пеленгаторной головки относительно расчетного положения. Причинами отклонения оси вращения могут быть: крены ЛА, повороты плоскости симметрии ЛА относительно плоскости ортодромии (например, на угол сноса), боковые отклонения ЛА от ортодромии и погрешности введения путевой скорости в путевой корректор.
– погрешности от оптических искажений возникают при прохождении солнечного света сквозь атмосферу, сюда же относятся помехи от света, отраженного от облаков и т.п.
Инструментальные погрешности возникают вследствие конструктивных недостатков прибора, и их суммарная величина лимитируется допусками.