

6.6. Вертолетный доплеровский измеритель див-1
Вертолетные
доплеровские измерители от самолетных
существенно отличаются в принципах
построения, связанных прежде всего с
различными назначениями и режимами
полетов вертолетов и самолетов. Так,
если самолетный доплеровский измеритель
должен выдавать информацию о
![]() и
и
![]() (или их составляющих) для осуществления
навигации методом счисления пути, то
вертолетный доплеровский измеритель,
кроме того, для обеспечения перехода к
режиму висения и фиксации этого режима
должен выдавать информацию о поперечной,
продольной и вертикальной составляющих
вектора скорости.
(или их составляющих) для осуществления
навигации методом счисления пути, то
вертолетный доплеровский измеритель,
кроме того, для обеспечения перехода к
режиму висения и фиксации этого режима
должен выдавать информацию о поперечной,
продольной и вертикальной составляющих
вектора скорости.
Следовательно, вертолетный измеритель должен дополнительно:
– определять знак доплеровского сдвига частоты, так как вертолет может лететь вперед, назад, влево, вправо, вверх, вниз;
– измерять доплеровский сдвиг частоты практически от нуля в режиме висения до максимального значения в режиме крейсерского полета.
В соответствии с назначением вертолетные доплеровские измерители можно разделить на устройства, обеспечивающие:
– измерение малых скоростей в диапазонах перехода к режиму висения;
– измерение больших скоростей в диапазонах режима навигации;
– измерение малых и больших скоростей.
Доплеровский измеритель предназначен для автономного измерения и индикации продольной и поперечной составляющих скорости перемещения вертолета относительно поверхности (земли, воды) в диапазонах, обеспечивающих переход к режиму висения и фиксации этого режима.
Техническая характеристика:
Диапазон измеряемых скоростей, км/ч:
по продольному каналу вперед 2–50
по продольному каналу назад 2–10
по поперечному каналу влево 2–25
по поперечному каналу вправо 2–25
Диапазон рабочих высот, м:
над сушей 0–110
над водной поверхностью (волнение > 1 балла) 0–80
Мощность СВЧ генератора, мВт 60
Доплеровский измеритель имеет трехлучевую приемно-передающую антенную систему. Ориентация лучей показана на рис. 6.9.
Первый луч
ориентирован в продольной вертикальной
плоскости и отклонен назад с вертикальным
углом визирования
![]() .
На рис. 9.9 показан случай горизонтального
положения вертолета. Второй луч отклонен
в поперечной вертикальной плоскости
влево с вертикальным углом визирования
.
На рис. 9.9 показан случай горизонтального
положения вертолета. Второй луч отклонен
в поперечной вертикальной плоскости
влево с вертикальным углом визирования
![]() .
Третий луч направлен вертикально вниз.
.
Третий луч направлен вертикально вниз.
Вектор полной
скорости можно разложить на три
составляющие в вертолетной горизонтальной
связанной системе координат (в скобках
указано положительное направление):
продольную
![]() (вперед); поперечную
(вперед); поперечную
![]() (вправо); вертикальную
(вправо); вертикальную
![]() (вверх). При горизонтальном положении
вертолета значения и знаки доплеровских
сдвигов частоты определяются проекциями
составляющих скоростей в вертикальной
продольной и вертикальной поперечной
плоскостях.
(вверх). При горизонтальном положении
вертолета значения и знаки доплеровских
сдвигов частоты определяются проекциями
составляющих скоростей в вертикальной
продольной и вертикальной поперечной
плоскостях.

Рис. 6.9. Ориентация лучей вертолетного измерителя
Средние частоты доплеровских спектров соответственно равны (рис. 6.10):
![]() ,
,
![]() ,
,
![]() . (6.11)
. (6.11)
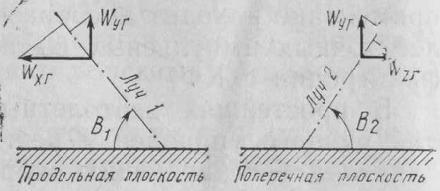
Рис. 6.10. Проекции составляющих скорости на направления лучей
Знак минус в
формулах показывает, что направления
проекций скоростей и излучения
противоположны. Доплеровский сдвиг
частоты сигнала, принятого по первому
лучу, зависит только от
![]() и
и
![]() ,
по второму лучу – только от
,
по второму лучу – только от
![]() и
и
![]() ,
а по третьему – только от
,
а по третьему – только от
![]() .
.
Подставив
![]() ,
найденное из последнего уравнения
(6.11) в первые два, найдем
,
найденное из последнего уравнения
(6.11) в первые два, найдем
![]() и
и
![]() :
:
![]() ,
,
![]() . (6.12)
. (6.12)
Таким образом, для
измерения и индикации составляющих
![]() и
и
![]() необходимо иметь информацию о доплеровском
сдвиге частоты с учетом знаков по трем
лучам раздельно, в вычислителе произвести
вычисления в соответствии с математическими
выражениями (6.12) и результат выдать на
индикатор. В измерителе и вычислителе
погрешности от влияние крена и тангажа
не учитываются и входят в погрешность
результата.
необходимо иметь информацию о доплеровском
сдвиге частоты с учетом знаков по трем
лучам раздельно, в вычислителе произвести
вычисления в соответствии с математическими
выражениями (6.12) и результат выдать на
индикатор. В измерителе и вычислителе
погрешности от влияние крена и тангажа
не учитываются и входят в погрешность
результата.