

5. Информационно-измерительные комплексы ла, современное состояние, тенденции развития, основные технические требования.
Под приборным комплексом понимается совокупность бортовых и вычислительных средств, служащих для восприятия, обработки и хранения информации.

Рис. 1. Обобщённая структурная схема приборного комплекса
УВИ – устройства восприятия информации;
УОИ – устройства обработки информации;
УС – устройства согласования;
УИ – устройства индикации;
БВС – бортовая вычислительная система.
Как видно из структурной схемы некоторые формы информации из решающих блоков УОИ могут напрямую подаваться на УС или на УИ, миную БВС.
По мере увеличения объема и сложности задач, решаемых ЛА и его экипажем, усложняется и бортовое оборудование. В этом процессе выделяется пять этапов: 1) самостоятельные, независимые приборы и устройства; 2) автономные бортовые подсистемы; 3) бортовые системы с собственными, независимыми вычислительными устройствами; 4) комплексы бортовых систем с единой вычислительной машиной для всех систем; 5) комплексы бортового оборудования интегрального типа с использованием вычислительных систем. Условный график тенденции совершенствования бортового оборудования представлен на рис. 2.
С ростом тактико-технических данных ЛА расширяются диапазоны, в которых необходимо проводить измерения, повышаются требования к точности и надежности измерений. Создание сложных и точных счетно-решающих устройств для аппаратуры третьего поколения стало затруднительно осуществить в пределах стандартных габаритных размеров приборов.

Рис. 2. Условный график тенденции совершенствования бортового оборудования
Поэтому уже бортовая аппаратура четвертого поколения выполнена на микросхемах и интегральных схемах. Наибольшее внимание при разработке аппаратуры четвертого поколения уделяется обеспечению высокого уровня организации систем на борту.
Бортовая аппаратура пятого поколения характеризуется объединением в единое целое различных бортовых систем на базе сети вычислительных средств. Структура такого комплекса может быть как строго иерархичной, так и гибкой. Этот переход сопровождается повышением степени резервирования отдельных устройств и систем и степени автоматизации контроля их работоспособности.
12. Канал измерения расхода.
Приборы и датчики, измеряющие расход топлива в единицу времени (расходомеры), применяются для выдерживания наиболее экономичного режима полета, отвечающего минимуму расхода горючего на километр пройденного пути (с учетом скорости полета). Эта же задача может решаться автоматически с помощью экстремального регулятора, воспринимающими устройствами которого служат датчик расхода топлива и датчик скорости полета. Зная запас топлива и его расход, можно вычислить возможную длительность и дальность полета, а также с учетом скорости полета и дальность.
6.Функция связи измерительного преобразователя (ип), математическая модель, чувствительность.
Любой измерительный прибор предназначен для преобразования какого-либо входного сигнала х(t) в кодированный выходной сигнал y(t):
y(t)=F[x(t)],
где x(t) и y(t) – векторные величины; F(x) – требуемая функция преобразования. Предполагается, что функция F(x) осуществляет все необходимые математические операции и преобразования.
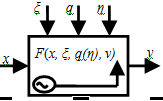
В реальных приборах функция преобразования зависит не только от сигнала x(t), но также от возмущения ξ(t) на сигнал x(t), от помех η(t), действующих на параметры прибора q, от погрешностей q, возникающих вследствие неточностей изготовления прибора, и от помех ν, возникающих в самом приборе (моменты трения, паразитные ЭДС и др.). т.е.
y(t)=F[x, ξ, q(η), ν],
где ξ, η, q(η), ν – векторы.
Измеряемыми величинами, на основе которых формируется полезный сигнал x(t), являются параметры первичной информации, такие, как p, to, количество и расход топлива, расстояние, скорости, ускорения, деформации, вибрации и т.д. К числу вредных возмущений относятся перегрузки, вибрации, электрические и магнитные поля, неконтролируемые вариации температуры, давления, влажности окружающей среды и др. Все эти возмущения вносят погрешности в показания прибора.
Прибор должен воспроизводить измеряемую величину в требуемой форме выходного сигнала, с наперед заданными точностными характеристиками.
Измерительные сигналы, поступающие на вход прибора, могут иметь различные формы, но должны преобразовываться в доступные для передачи (выхода) формы.
Основным элементом АППИ является первичный преобразователь, который, как правило, состоит из ЧЭ (чувствительного элемента) и ПЭ (преобразователя электрического) или ПИ (преобразователя информации).
Зависимость между входными и выходными элементами осуществляется через ФП (функцию преобразования) конкретного первичного преобразователя.
Первичные преобразователи помимо ФП характеризуются чувствительностью – отношение приращения выходного сигнала y к приращению входного сигнала x при x0, т.е.

Под понятием проектирования АППИ можно понимать разработку (создание) структурных, функциональных, принципиальных схем, удовлетворяющих выставляемым требованиям ТЗ (технического задания) с учётом новейших достижений науки и техники и современного состояния приборостроения.
Основные требования, предъявляемые к характеристикам приборов, следующие:
-
точность, находящаяся в допустимых пределах (необходимо принимать меры для устранения неточности);
-
прибор должен потреблять минимум мощности входного сигнала;
-
прибор должен обладать детектирующим свойством (мощность, выдаваемая элементом предыдущим, должна быть больше мощности, потребляемой последующим элементом);
-
минимальные габариты, вес, массу;
-
надёжность;
-
долговечность;
-
удобство эксплуатации;
-
соответствовать требованиям энергономии.