

44. Радиокомпас, принцип действия и его погрешности.
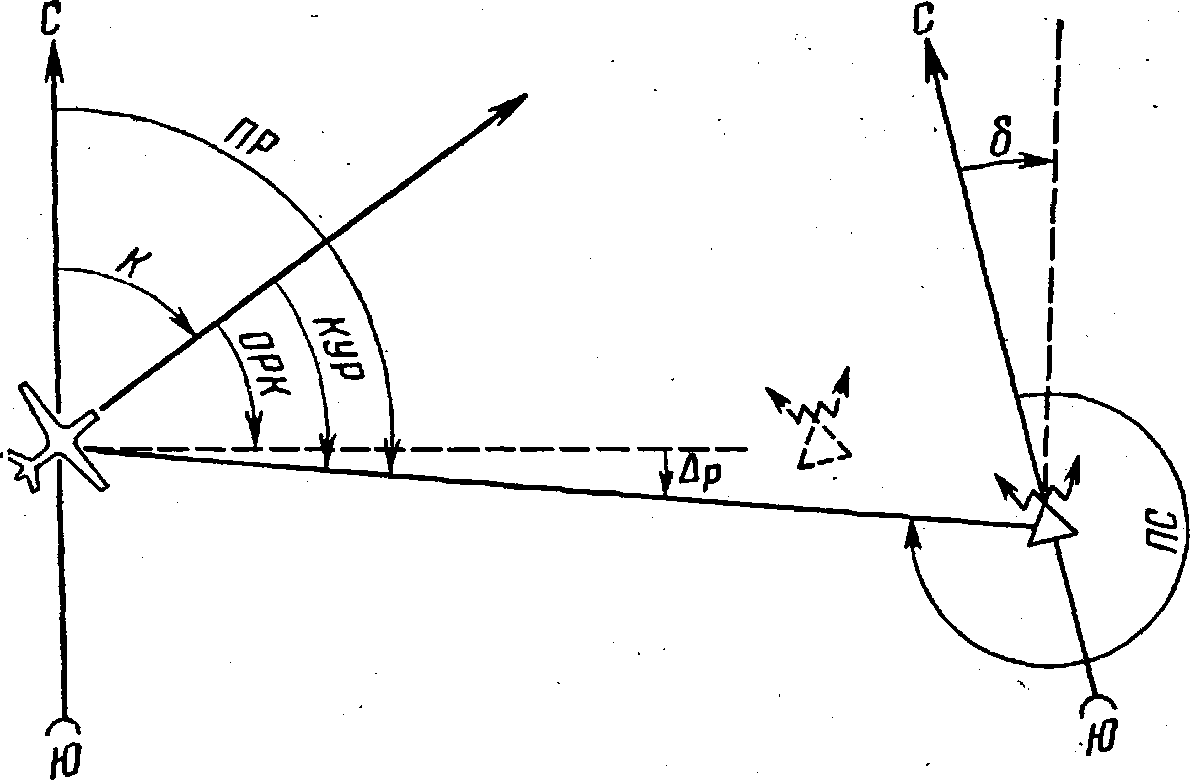
Курсовым углом радиостанции КУР называется угол, заключенный между продольной осью самолета и действительным направлением на радиостанцию. КУР отсчитывается от продольной оси самолета по ходу часовой стрелки до направления на радиостанцию от 0 до 360°.
Отсчетом радиокомпаса ОРК называется угол, заключенный между продольной осью самолета и измеренным направлением на радиостанцию. ОРК отсчитывается от продольной оси самолета до измеренного направления на радиостанцию от 0 до 360°.
Радиодевиация р - это угол, заключенный между измеренным и действительным направлениями на радиостанцию. Радиодевиация отсчитывается от измеренного к действительному направлению на радиостанцию вправо со знаком плюс (+), а влево со знаком минус (-). В современных радиокомпасах обеспечивается компенсация радиодевиации, и поэтому исправлений измеренной величины отсчета радиокомпаса производить не требуется.
Пеленгом радиостанции ПР называется угол между меридианом начала отсчета курса и направлением от самолета на радиостанцию. ПР отсчитывается от северного направления меридиана по ходу часовой стрелки до направления на радиостанцию от 0 до 360°.
В зависимости от начала отсчета курса самолета пеленги радиостанции могут быть истинными ИПР и магнитными МПР.
Пеленгом самолета ПС называется угол между меридианом радиостанции и направлением от радиостанции на самолет. ПС отсчитывается от северного направления меридиана по ходу часовой стрелки до направления на самолет от 0 до 360°. В зависимости от начала отсчета курса самолета пеленги самолета могут быть истинными ИПС и магнитными МПС.
Принцип работы радиокомпаса (кратко!!!)

Блок-схема радиокомпаса:
1 – рамочная антенна; 2 – открытая антенна; 3 – усилитель сигнала рамки; 4 – электронный переключатель; 5 – приемник; 6 – управляющая схема; 7 – звуковой генератор; 8 – двигатель поворота рамки; 9 – сельсин-датчик; 10 – указатель с сельсин-приемником.
В основу работы радиокомпаса заложен принцип измерения направления радиостанций по сигналу рамочной антенны.
Радиокомпас в своем составе имеет рамочную и открытую антенну. Диаграмма направленности для открытой антенны – круг.
Чувствительность
рамочной антенны зависит от положения
радиостанции. Если рамочная антенна
находится перпендикулярно оси направления
к радиостанции, то
 ,
если вдоль
,
если вдоль
 .
.
В состав АРК входят усилители, звуковой генератор для генерирования высокочастотных колебаний, система обратной связи, которая работает с использованием сельсина.
Сигнал с сельсина и двух антенн подается на усилитель. Двигатель поворачивает рамку до тех пор, пока сигнал по фазе сельсина не будет равен нулю и одновременно подается на указатель.
45. Принципы построения курсовых систем. Комплексная обработка информации от разных датчиков в курсовых системах и причины ее низкой эффективности. Принципы построения курсовых систем.
Курс является одним из важнейших параметров, знание которого необходимо для решения задач навигации и управления. Для определения курса самолетов была создана самая многочисленная группа курсовых приборов и систем, основанных на различных физических принципах.
Направление меридиана можно определить на борту летательного аппарата с помощью компаса, гирокомпаса, радиокомпаса и астрокомпаса.
Первыми курсовыми приборами, применявшимися на самолетах, были авиационные магнитные компасы (АМК). В зависимости от назначения они отличались по своим точностным, габаритным и массовым данным. Наиболее точными были штурманские компасы типа А, использовавшиеся в навигационных целях, менее точными с меньшими габаритными размерами были компасы для
Одна из первых таких идей состояла в том, чтобы в дополнение к АМК с целью облегчения управления (пилотирования) и обеспечения возможности выполнения разворотов в азимуте на заданные углы. использовать трехстепенный астатический гироскоп с горизонтальной осью собственного вращения ротора. Был создан прибор гирополукомпас (ГПК).
Магнитные дистанционные гидроскопические компасы типа ДГМК предназначены для определения курса и углов разворота ЛА. Чувствительным элементом ДГМК является магнитная система, устанавливающаяся по направлению компасного меридиана. В компасах ДГМК применяется потенциометрическая дистанционная передача. Указатели магнитного дистанционного компаса ДГМК-3 выдают компасный курс, указатели компаса ДГМК-5 совместно с радиокомпасом выдают компасный курс, курсовой угол радиостанции и магнитный пеленг радиостанции.
Наряду с курсовыми системами, основанными на использовании свойств МПЗ и применении гироскопов, с целью повышения точности и надежности определения курса в различных условиях и географических районах выдвигались и развивались идеи определения курса на другой физической основе. Используя закономерность движения небесных светил (в первую очередь Солнца), были созданы астрокомпасы для определения истинного курса.
Основными идеями построения астрокомпасов являются две: первая - построение модели автоматически действующей небесной сферы (точнее части ее), в результате чего образуется указатель истинного меридиана (экваториальный астрокомпас); другая - измерение курсового угла светила путем пеленгации последнего и вычисление азимута светила по данным координат местонахождения объекта и географического места светила (горизонтальный астрокомпас). Суммирование этих двух углов дает истинный курс. Астрокомпасы находят широкое применение, они лишены большинства недостатков, присущих компасам АМК и ДМК. Однако их функционирование возможно при оптической видимости Солнца и знании географических координат местонахождения.
Комплексная обработка информации от разных датчиков в курсовых системах и причины ее низкой эффективности.
Курсовые системы типа КС предназначены для определения и указания курса ЛА и углов его разворота, а также для указания пеленгов и курсовых углов радиостанции. Курсовые системы типа КС имеют три режима работы: гирополукомпаса (ГПК), магнитной коррекции (МК) и астрокоррекции (АК). Режим ГПК является основным режимом, Благодаря стабилизации гироузлов по крену в курсовых системах КС исключена карданная погрешность при кренах ЛА. В режиме ГПК система одновременно выдает гироскопический (ортодромический), магнитный и истинный курсы.
Курсовые системы типа КСИ предназначены для определения магнитного или гироскопического курса при любых углах крена и тангажа ЛА и определения курсовых углов и пеленгов радиостанций.
Курс ЛА определяется с помощью датчика с индукционным чувствительным элементом. Благодаря стабилизации гироузла гироагрегата по крену и тангажу по сигналам гировертикали в курсовых системах типа КСИ исключена карданная погрешность. Основным режимом работы КСИ является режим гирополукомпаса. Режим МК (при нажатой кнопке согласования) используется для начальной выставки системы по магнитному меридиану.
Курсовертикали типа СКВ-2Н являются централизованным устройством, объединяющим гироскопические и магнитные средства определения курса, гироскопические средства определения крена, и тангажа и выдачи их на указатели типа НПП, КПП и в бортовые системы, решающие задачи навигации, пилотирования и др.
Общее количество потребителей может быть: по курсу - 4, по крену - 7, по тангажу - 5. Для увеличения количества потребителей сигналов могут устанавливаться распределитель сигналов 1186В (по крену и тангажу) и блок БР-40 (по курсу).
Режимы работы.
Канал курса имеет три режима работы: гирополукомпаса (основной режим работы), магнитной коррекции, начальной выставки курса. Канал вертикали работает в одном режиме, обеспечивающем определение крена и тангажа ЛА.
Курсовые системы типа ТКС по принципу действия аналогичны курсовым системам КС и от курсовых систем этого типа отличаются выгодно тем, что имеют в 2-3 раза меньше величины ухода гироскопов в азимуте (0,5- град/ч, в то время как у курсовых систем типа КС допускается 2 град/ч).
Кроме того, при работе курсовой системы ТКС в режиме ГПК оба курсовых гироскопа работают в этом же режиме вне зависимости от положения переключателей "Коррекция" и "Потребители"; в курсовых системах типа КС с двумя гироагрегатами один гироскоп (основной или запасной) работает в режиме ГПК, а другой в режиме МК.
46.Роль и назначение СОИ на борту современных ЛА. Виды представления пилотажной, навигационной и иной информации на борту ЛА. Условия эксплуатации.
Роль и назначение СОИ на борту современных ЛА.
В процессе управления ЛА между пилотом и ЛА в комплексе осуществляется непрерывное информационное взаимодействие. Характер определяется типом и назначением ЛА, а также задачами полета.
Параметры, значения передаются по СОИ. Данную информацию пилот дополняет собственной информацией, получаемой от различных органов осязания.
На основании имеющейся информации формируется описание о состоянии ЛА. Пилот принимает решение о полученном параметре и воздействует на систему управления.
Система отображения информации – посредник между пилотом и ЛА.
Система отображения информации представляет различные виды отображения информации.
Практически пилот воспринимает информацию зрением, слухом и тактильным чувством, но до 90% всей информации приходится на органы зрения.
СОИ подразделяются на различные классы по 4-м признакам:
-
форма представления информации;
-
характер;
-
структура;
-
конструктивные признаки реализации.
По форме представления информации СОИ подразделяется на ассоциативные, текстовые, изобразительной формы отображаемой информации, цифровая, знаковая, алгоритмическая, структурная.
По характеру СОИ реализуются в виде постоянного представления информации, переменной информации, текущей информации, прогнозирующей информации.
По структуре СОИ подразделяются на однопараметрические, суммирующие, интегральные (обобщает несколько параметров), синтезирующая, командующая.
Конструктивный признак характеризуется компоновкой:
-
в виде приборных досок;
-
систем индикации информации на лобовом стекле (ИЛС);
-
шлемофоны.