

41. Приборы и датчики магнитного курса. Магнитное поле Земли. Понятие магнитного склонения. Простейший магнитный компас. Погрешности, девиационный прибор. Математическая модель.
На
современных ЛА устанавливают
централизованные системы, которые
объединяют гироскопические, магнитные
и радиотехнические приборы.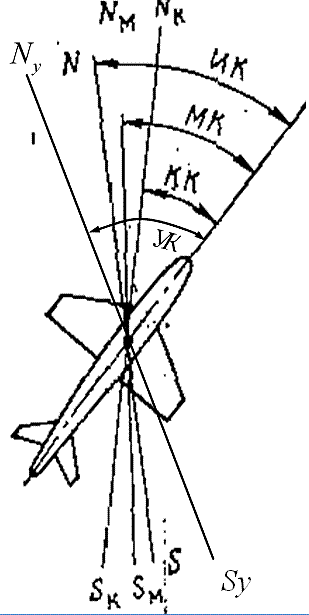
Приборы, предназначенные для измерения курса – компасы.
Курс самолета – угол в горизонтальной плоскости, заключенный между направлением, принятым за начало отсчета и направлением оси ЛА.
За направление принимают меридиан.
Относительно меридиана различают истинный, магнитный, компасный и условный курс.
NY – условный меридиан;
N – истинный меридиан;
NМ – магнитный меридиан;
NК – компасный меридиан;
Истинный курс – угол, заключенный между северным направлением меридиана и продольной осью самолета. (Отчет по часовой стрелке).
Магнитный курс – угол, заключенный между северным направлением магнитного меридиана и продольной осью самолета.
Компасный курс – угол, заключенный между северным направлением компасного меридиана и продольной осью самолета.
Условный курс – угол, заключенный между условным меридианом и продольной осью самолета.
Истинный, магнитный и компасный курс связаны между собой определенным отношением.
 – магнитное
склонение – это угол между северным
направлением истинного и магнитного
меридиана (
– магнитное
склонение – это угол между северным
направлением истинного и магнитного
меридиана ( – если по часовой стрелке (к востоку),
– если по часовой стрелке (к востоку),
 – если к западу).
– если к западу).
Азимутальная поправка – угол между условным и истинным меридианом.
 – девиация
магнитного компаса – угол между северным
направлением магнитного меридиана и
компасным направлением меридиана.
– девиация
магнитного компаса – угол между северным
направлением магнитного меридиана и
компасным направлением меридиана.
Некоторые понятия по земному магнетизму.
Принцип работы магнитного компаса (МК) основан на взаимном внешнем магнитном взаимодействии внешнего магнитного поля и пола, создаваемым постоянным магнитом.
Магнитное поле является однородным, если его напряженность постоянна во всех точках пространства.
При
нахождении постоянного магнита в
однородном магнитном поле на каждую
элементарную часть магнита действует
сила пропорциональная его массе и
напряженности магнитного поля.
Направление силы совпадает с направлением
внешнего магнитного поля. У постоянного
магнита имеется северный и южный полюс.
При отклонении оси магнита от внешнего
магнитного поля создается пара сил,
которая стремится повернуть его по
направлению напряженности.
Полюса магнита – точки приложения 2-х сил.
Прямая, соединяющая полюса – ось магнита.
Магнитный момент, создаваемый полем постоянного магнита определяется величиной внешнего магнитного поля и массой.

Н – напряженность;
 – момент,
приложенный к полюсам.
– момент,
приложенный к полюсам.
 – угол,
между направлением внутреннего и
внешнего магнитного поля.
– угол,
между направлением внутреннего и
внешнего магнитного поля.
При


Современные магнитные компасы представляют собой постоянные магниты, которые воздействуют с внешним магнитным полем, присущим Земле.
Понятие о Земном магнетизме
магнитное поле, имеющие условные магнитные полюса. Северным магнитным полюсом называют полюс, который взаимодействует с севером постоянного магнита. Северный магнитный полюс не совпадает с географическим магнитным полюсом. Северный магнитный полюс находится в районе Гудзонова залива.
Направление напряженности магнитного поля земли почти везде по земной поверхности наклонено к горизонтальной плоскости, кроме экватора.

θ – угол наклонения между горизонтальной составляющей и суммарной составляющей.
Вектор напряженности магнитного поля земли имеет несколько составляющих:
– основное дипольное магнитное поле Земли – содержит значительную часть напряженности;
– компонент магнитного поля, обусловленный неоднородностью магнитного поля материков;
– компонент магнитного поля от различных аномалий;
– компонент вариации и девиации магнитного поля – создается внешней составляющей магнитного поля земли;
Модуль горизонтальной составляющей зависит от географической составляющей и места положения земной поверхности.
Пространственное распределение аномальных магнитных полей определяется свойствами магнитных пород.