

33.Канал измерения вибрации авиадвигателя. Индукционные и пьезодатчики вибрации, их математические модели. Структурная схема аппаратуры контроля вибрации.
При работе силовых установок, возникают упругие колебания измен. напряжен деформир состояния элементов конструкции. Превышение колебаний, значительно ухудшают условия работы оборудования. Ухудшаются характеристики аппаратуры, могут привести к разрушению отдельных элементов.
Основным источником вибрации - силовая установка, а также отдельные вспомогательные установки и системы.
Виброколебания возникают под действием знакопеременных нагрузок и носят разнообразный характер, форму, характеризуется разнообразным спектром.
Два типа колебаний:
- траекторные, присущие к колеб. л/а
- упругие, определяются только вызванные работой силовой установки.
Вибродиагностика – одно из направлений техники диагностирования силовых установок. Широкая информация содержания вибросигналов, позволяет осуществлять диагностирование самых различных систем и элементов двигателя.
Вибрация ГТД обусловлена различными факторами:
- процесс сгорания
- с аэродинамическими процессами (протекание несгораемого топлива)
- прохождение воздуха по воздухозаборникам. Происходит явление помпажа, когда двигатель не справляется с объемом воздуха поступающего в двигатель через компрессор.
Основная причина вибрации – дисбаланс вращения, обрыв лопаток, разрушение подшипника.
Наиболее полными факторами являются:
-
скорость
-
перегрузки
-
перемещение отдельных элементов
-
частота
Вибродиагностика эффективна для обнаружения дефектов: стружки в масле, контроль различных систем.
Бортовая аппаратура предназначена для непрерывного контроля параметров вибрации, сигналов уровня вибрации превышающих допустимые значения, регистрация сигналов вибрации.
Бортовая виброизмерительная аппаратура сигнализирует об уровне вибрации достигающей допустимого предела.
Система регулирующая параметры должна измерять среднее и действующее значение вибрации, но тарируется в амплитудных значениях для получения соответствующих обобщенных параметров.
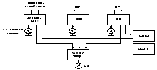
Структураня схема

Д – двигатель
V(t) – уровень вибрации(сигнал)
|Uф(t)| – положительная полуволна напряжения
На двигатель подается какая-либо вибрация
V(t) – уровень вибрации
Индикатор установленный на аппаратуре выводит информацию о средних значениях, а СИ показывает действующее значение уровня вибрации.
Функционально Эл блок содержит: нормирующие усилители, фильтры соответствующего диапазона, усилитель предъоконечного каскада, выпрямитель, систему сигнализации (сравнивает заданное значение со значением после обработки).
Эл блок имеет встроенный контроль выполненный в виде мультивибратора, который генерирует сигналы в диапазоне частот полосового фильтра и который подается на вход электронного блока.
Информация записывается в блоки САК и регистрации САКР.
Система регистрации используется в наземных условиях для диагностики двигателя а так же прогнозирования возможных неполадок.
Для измерения вибрации используются вибропреобразователи. Широкое применение нашли индукционные, а также пьезоэлектрические преобразователи.
Измерительные преобразователи размещаются в зоне опор подшипника по одному преобразователю.



Достоинства измерительных преобразователей:
- достаточная чувствительность;
- выходной сигнал пропорционален скорости U=f(V);
- возможность работы при достаточно высоких температурах.
Недостатки:
- зависимость выходных параметров от температуры (изменяется сопротивление и магнитная проницаемость)
Пьезоэлектрические акселерометры.

Принцип основан на измерении ускорения воздействующего на пьезопреобразователь.Достоинства:
- простота;
- высокая надежность;
- малые габариты и масса;
- работа при т-ре до 250°С
Недостатки:
- зависимость градуировочной характеристики от темперотуры;
- датчик динамический (не возможность работы в статических условиях).