

3. Порядок выполнения лабораторной работы.
По заданию преподавателя выбрать вариант таблицы содержащей результаты многомерного эксперимента. Ввести предполагаемый вид аппроксимирующего полинома на листе «Вид модели». Рекомендуется проводить исследование и построение модели начиная с полинома первой степени (линейная модель).
На вкладке «Макросы» вызвать программу нахождения параметров модели. По виду модели программно формируется система нормальных уравнений и затем решается одним из методов исследованных в предыдущей лабораторной работе.
На листе «Параметры модели» приводятся значения параметров и оценка средне квадратичной и максимальной погрешности модели выбранного вида. По формулам оценки значимости параметров модели исключить из модели незначимые члены полинома и затем ввести в модель (полином) члены более высоких порядков для снижения погрешности моделирования.
Повторить вышеприведенные операции до получения необходимой точности модели.
Отчет по лабораторной работе должен содержать следующие результаты исследования:
- виды полиномиальных моделей;
- значения погрешностей моделей;
- оценки значимости параметров модели;
- оценки вычислительных затрат.
Лабораторная работа №4 Моделирование процессов в устройствах автоматических систем
Цель работы
Целями предлагаемой лабораторной работы является моделирование различных временных процессов в устройствах автоматических систем и получение практических навыков в использовании методов анализа процессов с помощью решения дифференциальных уравнений численными методами.
Основные положения методик анализа процессов
Одним из часто используемых элементов автоматических систем является звено второго порядка. Такое звено может быть представлено электрическим аналогом, эквивалентная схема которого приведена на рис. Рассматривая устройство как четырехполюсник в системе G параметров, коэффициент передачи по напряжению будет иметь вид:

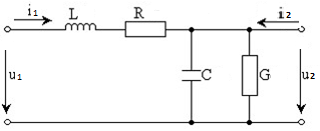
Рис 4.1. Эквивалентная схема
где Z = R + pL; Y = G + pG . Учитывая то, что величина G как правило может быть величиной входной проводимости следующего каскада или проводимостью изоляции в кабельной линии её можно считать близкой к нулю. Тогда коэффициент передачи можно записать в виде
 (4.1)
(4.1)
и
делая замену оператора

Представим связь между u1(t) и u2(t), как модель процесса в виде дифференциального уравнения второго порядка
 (4.2)
(4.2)
Решение полученного уравнения описывает процесс в исследуемом устройстве. Это уравнение приводится к системе уравнений первого порядка для возможности применения численных методов.
Решение систем дифференциальных уравнений
Задача Коши заключается в решении систем обыкновенных дифференциальных уравнений первого порядка, представляемых в виде

……………………………………

……………………………………

где j=1÷N — номер каждой зависимой переменной уj,
х — независимая переменная. Если задача Коши решается для анализа поведения системы или объекта во времени, то х является временем (x = t). Решение при заданных начальных условиях х=х0, у1 (x0)=у0, y2(х0)=y2, …, yN(x0)=yN сводится к нахождению зависимостей (интегральных кривых) у1 (х), у2(х),.., уj (х),...., yN (х), проходящих через точки, заданные начальными условиями (х0, у10), (х0, у20), , (х0, уj0), …, (х0, уN0), Задача Коши сводится к интегрированию дифференциальных уравнений. Порядок метода численного интегрирования при этом определяет и порядок метода решения.
Обобщенная форма записи каждого из уравнений системы может быть представлена в общем виде
где Yj в правой части уравнения — векторы переменных
у1 (х), у2(х),.. уj (х),..... yN (х) а Fj — правая часть каждого из уравнений ()). В частности, одно дифференциальное уравнение (y=Yj=Yi и Fj = F=F1) записывается в виде
 .
.
Дифференциальные уравнения высшего порядка
 (4.3)
(4.3)
где (п) — порядок уравнения, могут быть сведены к системам вида () или () с помощью следующих преобразований:


……………. (4.4)

Следовательно, решение (4.3) сводится к решению системы дифференциальных уравнений первого порядка( 4.4).
Метод Эйлера — Коши — простейший метод первого порядка для численного интегрирования дифференциальных уравнений. Он реализуется следующей рекуррентной формулой:
 (4.5)
(4.5)
где h — шаг интегрирования (приращение переменной х). Этот метод обладает большой погрешностью и имеет систематическое накопление ошибок. Погрешность метода R~(h2) т. е. пропорциональна h2.
Метод Эйлера — Коши с итерациями заключается в вычислении на каждом шаге начального значения
 (4.6)
(4.6)
Затем с помощью итерационной формулы
 (4.7)
(4.7)
решение уточняется. Итерации проводят до тех пор, пока не совпадает заданное число цифр результата на двух последних шагах итераций. Погрешность метода R ~ (h3). Обычно число итераций не должно превышать 3—4, иначе нужно уменьшить шаг h.
Модифицированный метод Эйлера второго порядка реализуется следующими рекуррентными формулами:
 (4.8)
(4.8)
где
 .
.
Метод
дает погрешность R~(h3)
и имеет меньшее время вычислений,
поскольку вместо нескольких итераций
производится вычисление только одного
значения
Метод трапеций — одна из модификаций метода Эйлера второго порядка. Он реализуется применением на каждом шаге формулы
 (4.9)
(4.9)
где
 ,
, ,
и дает
погрешность R~(h3).
Этот метод относится к общим методам
Рунге - Кутта.
,
и дает
погрешность R~(h3).
Этот метод относится к общим методам
Рунге - Кутта.
Метод Рунге — Кутта четвертого порядка является наиболее распространенным методом решения систем () при шаге h = const. Его достоинством является высокая точность — погрешность R~(h5) — и меньшая склонность к возникновению неустойчивости решения. Алгоритм реализации метода Рунге — Кутта заключается в циклических вычислениях Yj(i+1) на каждом i+1 шаге по следующим формулам:

 (4.10)
(4.10)


При переходе от одной формулы к другой задаются или вычисляются соответствующие значения х и Yj; и находятся по подпрограмме значения функций Fj (х, Yj,).Решение одного дифференциального уравнения методом Рунге — Кутта производится по приведенным формулам, если в них опустить индекс j, а из алгоритма исключить циклы.. Последнее резко упрощает программу и позволяет получить минимально возможное время счета.
Ввиду особого значения и широкого применения дифференциальных уравнений второго порядка полезно иметь специальную программу для их решения.
Метод Рунге — Кутта для дифференциального уравнения второго порядка вида
 (4.11)
(4.11)
имеющий погрешность R~(h5), реализуется с помощью следующих формул:


 (4.12)
(4.12)


Перед началом вычислений надо задать шаг h и начальные значения хо, у(хо)=уо и у' (х0) =y0′.
Автоматическое изменение шага в ходе решения систем дифференциальных уравнений необходимо, если решение требуется получить с заданной точностью. При высокой точности (погрешность ε=E=10-3) и решении в виде кривых с сильно различающейся крутизной автоматическое изменение шага обеспечивает уменьшение общего числа шагов в несколько раз, резко уменьшает вероятность возникновения числовой неустойчивости, дает более равномерное расположение точек графика кривых (решений) при их выводе на печать.
Метод Рунге — Кутта с автоматическим изменением шага заключается в том, что после вычисления yj(i+1) с шагом h все вычисления проводятся повторно с шагом h/2. Полученный результат y*j(i+1) сравнивается с yj(i+1). Если с |yj(i+1) ̶ y*j(i+1)|<е, вычисления продолжают с шагом h, в противном случае шаг уменьшают. Если это неравенство слишком сильное, шаг, напротив, увеличивают. При той же погрешности R~(hs) лучшие результаты дает описанный ниже метод.
Метод Рунге — Кутта — Мерсона с автоматическим изменением шага обеспечивает приближенную оценку погрешности на каждом шаге интегрирования. Погрешность интегрирования имеет порядок п5. Этот метод реализуется следующим алгоритмом.
1. Задается число уравнений N, погрешность ε= Е. начальный шаг интегрирования h = H и начальное значение х=х0, у1 (x0)=у0, y2(х0)=y2, …, yN(x0)=yN
2. С помощью 5 циклов с управляющей переменной j= 1, 2, ...., N вычисляются коэффициенты:





3. Находятся (в последнем цикле) значение

и погрешность

4. Проверяется выполнение условий

Если первое условие не выполняется, делится шаг h на 2 и повторяются вычисления с п. 2, восстановив начальные значения Yji. Если это условие выполняется и выполняется второе условие, значения xi+1=xi+h выводятся на печать. Если второе условие не выполняется, шаг h увеличивается вдвое и вычисления опять повторяются с п. 2.
Таким образом, Yj(i+1) выводится на печать только при одновременном выполнении условий этого пункта.
Как отмечалось, погрешность Rj(i+1) на каждом шаге метода Рунге — Кутта — Мерсона оценивается приближенно. При решении нелинейных дифференциальных уравнений истинная погрешность может отличаться в несколько раз от заданной E.
Метод Рунге — Кутта — Фельберга с автоматическим изменением шага дает более точную оценку погрешности на каждом шаге и реализуется последовательным циклическим вычислением по следующим формулам :






Погрешность

в этом методе — разность приращений Yj(i+1), вычисленных по двум формулам: порядка n = 4 () и порядка n+1. Последняя формула не приводится, но использована для вычисления Rj(i+1) Если Rj(i+1) >E, шаг n уменьшается вдвое, если Rj(i+1) < E/20, он увеличивается вдвое. Этот метод имеет четвертый порядок.
Одношаговые методы решения систем дифференциальных уравнений, к которым относятся все описанные выше методы, основаны на вычислениях по рекуррентным формулам, содержащим данные, полученные из решения на одном предшествующем шаге. Эти методы обеспечивают автоматическое начало вычислений при заданных начальных условиях и изменение (в том числе автоматическое) шага в ходе вычислений.
Многошаговые методы решения дифференциальных уравнений базируются на использовании данных решения на нескольких предшествующих шагах. Это позволяет повысить скорость вычислений. Однако для начала вычислений приходится выполнять одношаговыми методами несколько первых шагов. Аналогично это делается при каждой смене шага интегрирования.
Методы прогноза и коррекции — разновидности многошаговых методов, при которых решение вначале проводится по формуле прогноза, а затем уточняется по формуле коррекции.
Ввиду сложности программной реализации многошаговых методов, а также неявных методов численного интегрирования (последние лишены численной неустойчивости решения), они редко используются при решении задач на персональных ЭВМ.