

3.1.3.2. Импульсные оптические датчики положения
Импульсный фотоэлектрический датчик (ИОДП) преобразует значение перемещения исполнительного механизма в унитарный код, т.е. последовательность импульсов, число которых пропорционально перемещению.
Оптическая шкала ИОДП является модификацией растровой шкалы и содержит несколько дорожек разбитых на дискретные (активные и пассивные) участки.
Современные ИОДП, как правило, включают те же основные модули, что и РОДП: оптико-механическую систему (первичный преобразователь), электрическую схему считывания, а также схему определения знака (реверсивную схему).
 Оптико-механические
системы простейших ИОДП выполнялись
безредукторными и содержали блок
осветителя, кодирующую шкалу и фотоэлемент.
В современных конструкциях ИОДП шкала
содержит несколько дорожек и смещенных
на нецелое число шагов фотоэлементов.
При такой схеме значительно уменьшается
цена управляющего импульса, определяющая
разрешающую способность датчика. Так,
например, в датчиках фирмы Ferranti
используются шкалы с 1250 ... 10000 штрихами
и два фотодиода, причем штрихи дорожек
смещены друг относительно друга на
четверть шага (рис. 3.39). Одновибраторы
измерительной схемы ИОДП формируют и
подают на счетчик два импульса с обеих
дорожек - по переднему и заднему фронту
каждого штриха, и поэтому, при вращении
вала на один оборот шкалы возбуждается
импульсов в 4 раза больше числа делений.
Для шкалы с 1250 штрихами это соответствует
5000 импульсам на оборот.
Оптико-механические
системы простейших ИОДП выполнялись
безредукторными и содержали блок
осветителя, кодирующую шкалу и фотоэлемент.
В современных конструкциях ИОДП шкала
содержит несколько дорожек и смещенных
на нецелое число шагов фотоэлементов.
При такой схеме значительно уменьшается
цена управляющего импульса, определяющая
разрешающую способность датчика. Так,
например, в датчиках фирмы Ferranti
используются шкалы с 1250 ... 10000 штрихами
и два фотодиода, причем штрихи дорожек
смещены друг относительно друга на
четверть шага (рис. 3.39). Одновибраторы
измерительной схемы ИОДП формируют и
подают на счетчик два импульса с обеих
дорожек - по переднему и заднему фронту
каждого штриха, и поэтому, при вращении
вала на один оборот шкалы возбуждается
импульсов в 4 раза больше числа делений.
Для шкалы с 1250 штрихами это соответствует
5000 импульсам на оборот.
Для определения направление вращения вала (штока) используются шкалы, относительное смещение штрихов на дорожках которых составляет четверть шага. В этом случае, выходной сигнал с одновибратора внешней дорожки будет опережать сигнал одновибратора внутренней для одного направления движения и отставать для другого. Для определения числа целых оборотов используется репер, формирующий импульс начала отсчета. Он также используется для возврата счетчика в 0.
Фотоприемники сдвинуты друг относительно друга на расстояние L, равное:
L = (m + 1/4) W,
где W - шаг диска, m - целое число.
Знак направление движения исполнительного органа определяется логической схемой, вызывающей срабатывание соответствующего ключа (рис. 3.40).
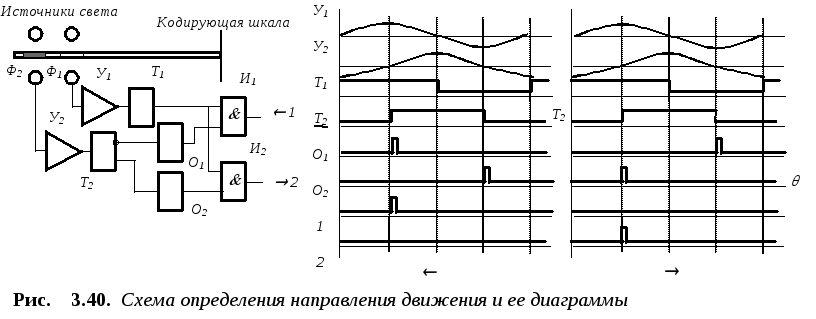 В данной схеме
используются два канала измерения,
связанные с каждой дорожкой кодовой
шкалы. Триггеры Шмитта Т1,
Т2,
открыты в то время, когда сигналы с
усилителей У1,
У2
имеют положительную полярность. Это
соответствует прозрачному участку
кодирующей шкалы. В соответствии с
расположением фотоприемников Ф1
и Ф2
сигналы с триггеров сдвинуты друг
относительно друга на 1/4 периода
следования, соответствующего периоду
синусоидального сигнала усилителя.
Дифференцирующие цепи О1,
О2
(для этой цели могут использоваться
одновибраторы) формируют короткие
импульсы в момент переброса триггера
Т2
по переднему и заднему фронту. На выходе
схемы совпадения И1
появляется сигнал только тогда, когда
на ее входах есть одновременно сигналы
с О1
и Т1,
а на выходе И2
- с О2
и Т1.
Следовательно, на выходе схемы И1
сигналы появляются при движении,
например, «вперед», а на выходе И2
- «назад». Количество импульсов определяет
саму величину перемещения. В качестве
накапливающего сумматора используется
реверсивный счетчик.
В данной схеме
используются два канала измерения,
связанные с каждой дорожкой кодовой
шкалы. Триггеры Шмитта Т1,
Т2,
открыты в то время, когда сигналы с
усилителей У1,
У2
имеют положительную полярность. Это
соответствует прозрачному участку
кодирующей шкалы. В соответствии с
расположением фотоприемников Ф1
и Ф2
сигналы с триггеров сдвинуты друг
относительно друга на 1/4 периода
следования, соответствующего периоду
синусоидального сигнала усилителя.
Дифференцирующие цепи О1,
О2
(для этой цели могут использоваться
одновибраторы) формируют короткие
импульсы в момент переброса триггера
Т2
по переднему и заднему фронту. На выходе
схемы совпадения И1
появляется сигнал только тогда, когда
на ее входах есть одновременно сигналы
с О1
и Т1,
а на выходе И2
- с О2
и Т1.
Следовательно, на выходе схемы И1
сигналы появляются при движении,
например, «вперед», а на выходе И2
- «назад». Количество импульсов определяет
саму величину перемещения. В качестве
накапливающего сумматора используется
реверсивный счетчик.
Частотные характеристики ИОДП определяются количеством штрихов-сегментов на дорожке и длительностью импульсов одновибратора, которая обычно составляет ~1/4 периода штриха. Например, для датчиков угла, с кодирующими шкалами, формирующими 1250 импульсов на оборот максимальная скорость вращения составит 5000 об/мин, 5000 импульсов - 2000 об/мин. Увеличение количества сегментов требует соответствующего увеличения и размеров шкал. В частности, типовые промышленные ИОДП содержат диск диаметром до 150 мм, на котором размещают 5000 сегментов. Разрешающая способность такого датчика составит 1:20000 на оборот, или ~ 1'.
В табл. 3.12 приведены примеры некоторых популярных моделей ИОДП.
Таблица 3.12. Примеры промышленных ИОДП
|
Модель |
Uип, В |
N*, имп/об |
w, об/мин |
e, ‘ |
Æ, мм |
l, мм |
m, кг |
|
ВЕ-178 |
± 15 |
2500 |
6000 |
5 |
50 |
106 |
0,7 |
|
ПУФ-МИНИ |
5 |
1024 |
6000 |
11 |
30 |
61 |
0,2 |
|
ROD 800 |
5 |
36000 |
0,5 |
0,06 |
170 |
50 |
0,8 |
|
mini-ROD-450 |
5 |
3600 |
3000 |
10 |
36 |
33 |
0,1 |
|
TSI-110 |
± 15 |
12000 |
6000 |
1 |
70 |
75 |
0,3 |
Примечание. Датчики моделей ROD разработаны фирмой Heidenhain, Германия, TSI-110 - фирмой Tamagawa, Япония.
ИОДП в настоящее время является наиболее распространенным типом ДПП. Достоинства ИОДП - гальваническая развязка информационных цепей, а также простота и надежность конструкции обусловили подавляющее преимущество этих ДПП в типовых задачах измерения перемещений. В то же время положение измерять с помощью ИОДП затруднительно, т.к. для них характерно накопление ошибок при сбоях питания и необходимость периодического определения нуля отсчета.