

Основные понятия и определения
Объект управления - техническое устройство (часть окружающего мира) или процесс, поведение которого нас не устраивает по каким-либо причинам.
Управление - процесс воздействия на объект управления с целью изменения его поведения нужным образом.
Регулирование - частный случай управления, целью которого является приведение объекта к заданному состоянию.
Автоматический процесс - процесс, который совершается без участия человека.
Система - совокупность элементов, объединенных общим режимом функционирования. При этом элементом можно называть любое техническое устройство.
Динамическая система - система, процессы в которой изменяются с течением времени в силу собственных свойств.
Система автоматического управления (С АУ) - динамическая система, которая работает без участия человека.
Теория автоматического управления (ТАУ) - научно-техническая дисциплина, в рамках которой изучаются свойства систем автоматического управления, разрабатываются принципы расчета и построения таких систем.
Основными элементами САУ (рис. 1.1) являются:
- объект
управления (ОУ);
объект
управления (ОУ);
- управляющее устройство или регулятор (Р), который сравнивает выход управляемого объекта с желаемым и в зависимости от результата вырабатывает управляющий сигнал на объект.
Основные понятия и определения
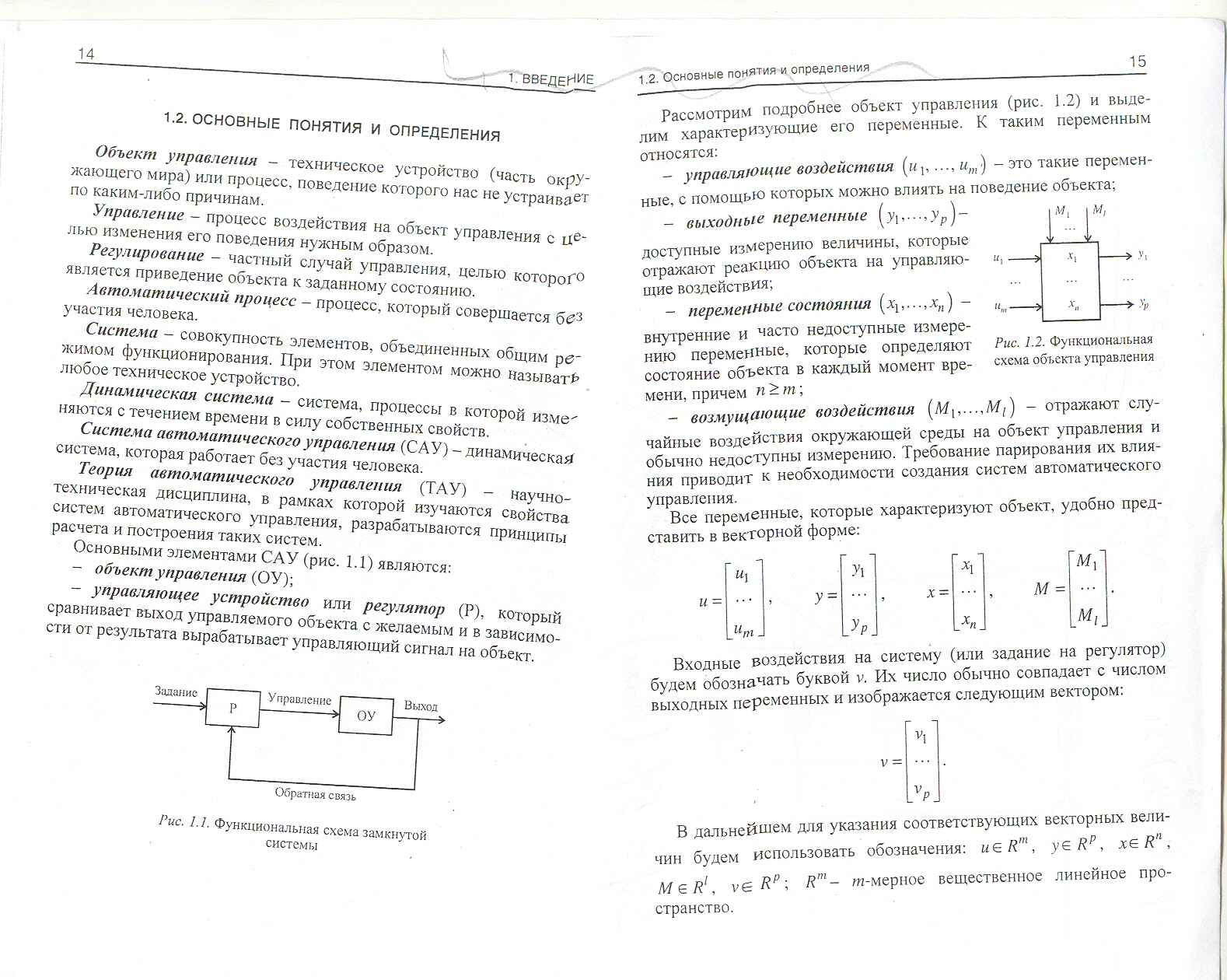
Рассмотрим подробнее объект управления (рис. 1.2) и выделим характеризующие его переменные. К таким переменным относятся:
управляющие воздействия (u1,……ит) - это такие переменные, с помощью которых можно влиять на поведение объекта;
в ыходные переменные (у1,….,ур)-доступные измерению величины, которые отражают реакцию объекта на управляющие воздействия;
- переменные состояния (x1,…..xn) -внутренние и часто
недоступные измерению переменно, которые
определяют в каждый момент времени схема
объекта управления, причем п>т;
- возмущающие воздействия (M1,...,Ml) - отражают
случайные воздействия окружающей среды на
объект управления и обычно недоступны
измерению. Требование парирования их влияния приводит к необходимости создания систем автоматического управления. Все переменные, которые характеризуют объект, удобно представить в векторной форме:
Входные воздействия на систему (или задание на регулятор) будем обозначать буквой υ. Их число обычно совпадает с числом выходных переменных и изображается следующим вектором:

 υ1
υ1
υ= …
υр
В дальнейшем для указания соответствующих векторных величин будем использовать обозначения: u Є Rm, yЄRp, хЄ Rn , M Є Rl, υ Є Rp; Rm- m-мерное вещественное линейное пространство.
В зависимости от числа входных и выходных переменных выделяют:
одноканальные объекты (или системы) - объекты, в которых есть только одна выходная переменная ( р -1);
многоканальные (многосвязные, многомерные, взаимосвязанные) объекты (или системы) - объекты, в которых число выходных переменных больше единицы ( р > 1).