

Ограничение тока и момента электропривода.
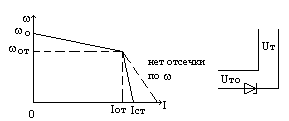
Стабилизация момента в установившихся режимах необходима в приводах механизмов работающих с резко переменной нагрузкой, или в приводах, работающих на упор. Стабилизацию момента П в рассматриваемых системах реализуется обычно с помощью ООС по току, что позволяет получить резкое снижение скорости при приблизительно постоянном моменте. С помощью ОС по току осуществляется и получение необходимых динамических характеристик. Для ограничения тока или момента используется так называемая токовая отсечка. По сути это нелинейная ОС (задержанная ОС), которая вступает в действие лишь при определенных условиях.
Таким образом, ОС будет действовать только тогда, когда ток Д превышает ток отсечки. Это приводит к тому, что на электромеханической характеристике привода появляется крутопадающий участок, обусловленный включением ООС по току.
На практике значение тока отсечки, или соответствующее значение момента рассчитывается из условия электрической или механической прочности и обычно имеет вполне определенное значение, что позволяет осуществить отсечку за счет введения стабилитрона в цепь ОС.
В некоторых случаях перед нами непосредственно стоит задача стабилизации момента.
В
тех случаях, когда имеется реверсивный
привод, в ц епи
отсечки устанавливается либо параллельно
2 диода, либо включается встречно 2
стабилитрона. Регулирование тока отсечки
производится регулированием опорного
напряжения
епи
отсечки устанавливается либо параллельно
2 диода, либо включается встречно 2
стабилитрона. Регулирование тока отсечки
производится регулированием опорного
напряжения
![]() .
Для того, что бы повысить уровень
стабилизации момента в систему вводят
задерживающую ОС по скорости (отсечку
по скорости), которая позволяет о
.
Для того, что бы повысить уровень
стабилизации момента в систему вводят
задерживающую ОС по скорости (отсечку
по скорости), которая позволяет о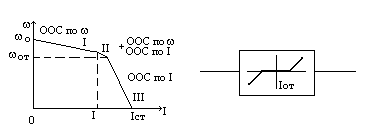 тключить
ОС по скорости, когда ток превышает
значение тока отсечки. Поскольку
настройка отсечки по скорости в момент
отсечки по току, обычно отсечку по
скорости проводят чуть позже отсечки
по току.
тключить
ОС по скорости, когда ток превышает
значение тока отсечки. Поскольку
настройка отсечки по скорости в момент
отсечки по току, обычно отсечку по
скорости проводят чуть позже отсечки
по току.
Замкнутые системы управления электроприводом переменного тока.
Решить проблему регулирования частоты вращения АД в широком диапазоне при жестких характеристиках удается лишь в замкнутых системах управления.
Приводы с тиристорным регулятором напряжения.
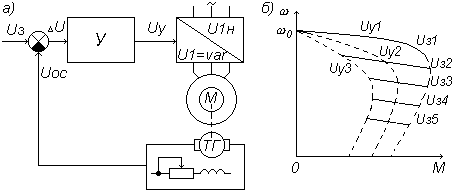
Использование способа регулирования частоты вращения АД изменением напряжения в разомкнутых системах не нашло применения из-за ограниченного диапазона регулирования и резкого снижения перегрузочной способности.
 В
замкнутых системах управления обратная
связь по частоте вращения дает возможность
получить достаточно жесткие характеристики
В
замкнутых системах управления обратная
связь по частоте вращения дает возможность
получить достаточно жесткие характеристики
![]() и обеспечить регулирование частоты
вращения в широком диапазоне. В некоторых
случаях
и обеспечить регулирование частоты
вращения в широком диапазоне. В некоторых
случаях
![]() .
Недостатком этого метода является то,
что Д в каждый момент времени работает
в какой-то точке искусственной
характеристики полученной за счет
изменения напряжения. В результате
скольжение Д с увеличением диапазона
регулирования резко возрастает (учитывая,
что точка
.
Недостатком этого метода является то,
что Д в каждый момент времени работает
в какой-то точке искусственной
характеристики полученной за счет
изменения напряжения. В результате
скольжение Д с увеличением диапазона
регулирования резко возрастает (учитывая,
что точка
![]() общая для всех характеристик). В итоге
резко возрастают потери Д. В частности,
при диапазоне регулирования
общая для всех характеристик). В итоге
резко возрастают потери Д. В частности,
при диапазоне регулирования
![]() потери составляют 50%, а при увеличении
диапазона регулирования до 5, потери
увеличиваются до 80%. Кроме того с переходом
на нижние регулировочные характеристики
уменьшается максимальный развиваемый
момент. Правда с последним недостатком
можно бороться, если использовать АД с
фазным ротором.
потери составляют 50%, а при увеличении
диапазона регулирования до 5, потери
увеличиваются до 80%. Кроме того с переходом
на нижние регулировочные характеристики
уменьшается максимальный развиваемый
момент. Правда с последним недостатком
можно бороться, если использовать АД с
фазным ротором.
Эти
приводы широко используются в
кратковременных и повторно-кратковременных
режимах. Мощность таких приводов обычно
ограничивается
![]() кВт.
К достоинствам таких приводов можно
отнести получение хороших динамических
характеристик и различных режимов
работы за счет использования тиристорных
регуляторов напряжения.
кВт.
К достоинствам таких приводов можно
отнести получение хороших динамических
характеристик и различных режимов
работы за счет использования тиристорных
регуляторов напряжения.
Недостатком ЭП с ТРН является наличие больших потерь, пропорциональных скольжению двигателя, которое увеличивается с уменьшением частоты вращения. Такая система управления (с ТРН) применяется для приводов небольшой мощности (до 20 кВт), работающих в кратковременных режимах.