

1. Магнітний підсилювач
Магнітний підсилювач являє собою підсилювально-перетворювальний пристрій параметричного типу, принцип роботи якого заснований на використанні властивостей дроселя змінного струму з феромагнітним сердечником, змінювати свою індуктивність при підмагнічуванні постійним струмом.
Поряд з посиленням магнітний підсилювач одночасно перетворює сигнал постійного струму, що є вхідним сигналом, в сигнал змінного струму.
2. Класифікація
По виду допоміжного джерела енергії підсилювачі поділяють на електричні, гідравлічні і пневматичні. Останні два види підсилювально-перетворювальних елементів часто поєднуються з виконавчими пристроями і називаються серводвигунами.
Підсилювально-перетворювальні елементи, як і датчики сигналів, діляться на два класи:
- Параметричні, основою яких служить нелінійний елемент, що дозволяє керувати процесами в ланцюгах живлення та навантаження за допомогою вхідного сигналу малої потужності;
- Генераторні, в яких перетворення енергії живлення в енергію вихідного сигналу відбувається під впливом малопотужного вхідного сигналу.
Магнітні підсилювачі поділяють на дві групи:
- нереверсивні
- реверсивні.
Нереверсивним називають магнітний підсилювач, у якого полярність або фаза струму навантаження не залежить від полярності струму керування. В цій групі виділяють нейтральні та поляризовані підсилювачі.
Реверсивним називають магнітний підсилювач, у якого полярність або фаза струму навантаження змінюється у залежності від полярності струму керування. Виділяють реверсивні магнітні підсилювачі з виходом на сталому та змінному струмі.
За схемотехнічною ознакою виділяють три типи реверсивних магнітних підсилювачів – диференційні, мостові та трансформаторні
Рис. 1.1. Принцип дії магнітного підсилювача:
а)
електрична схема; б) робочі точки на
кривій намагнічування; в) графік
залежності зворотної магнітної
проникності від напруженості магнітного
поля; г) - характеристика вхід - вихід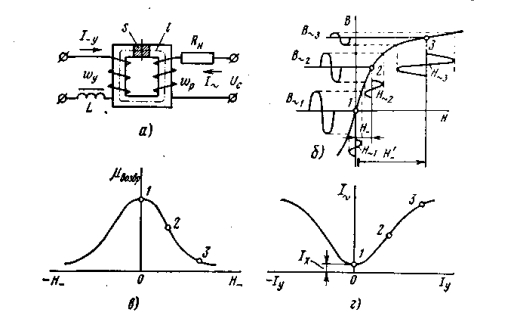
Найпростіший
магнітний підсилювач складається з
опору навантаження Rн
,
робочої обмотки
![]() з феромагнітним сердечником. Коло
підключене до джерела змінної напруги
з феромагнітним сердечником. Коло
підключене до джерела змінної напруги
![]() .
Якщо вважати опір робочої обмотки
.
Якщо вважати опір робочої обмотки
![]() – чисто індуктивним а струм близький
до синусоїдного, то
– чисто індуктивним а струм близький
до синусоїдного, то
![]() .
Опір
визначається індуктивністю робочої
обмотки
.
Опір
визначається індуктивністю робочої
обмотки
![]() ,
яка залежить від зворотної магнітної
проникності
,
яка залежить від зворотної магнітної
проникності
![]() матеріла сердечника основна крива
намагнічування якого приведена на рис.
1.1, б.
матеріла сердечника основна крива
намагнічування якого приведена на рис.
1.1, б.
При
відсутності постійного струму Iу
в обмотці керування![]() по навантаженню йде так званий струм
холостого ходу
по навантаженню йде так званий струм
холостого ходу
![]() ,
який визначається магнітною проникністю
симетричного циклу близько точки 1 і
відповідним їй опором
.
При цьому велика частина напруги схеми
прикладена до обмотки
і врівноважується ЕРС самоіндукції
цієї обмотки; амплітуда зміни індукції
сердечника В~
– максимальна.
,
який визначається магнітною проникністю
симетричного циклу близько точки 1 і
відповідним їй опором
.
При цьому велика частина напруги схеми
прикладена до обмотки
і врівноважується ЕРС самоіндукції
цієї обмотки; амплітуда зміни індукції
сердечника В~
– максимальна.
Поява струму керування Iу викликає появу напруженості постійного магнітного поля Н_ (напруженості підмагнічування); цикл кривої намагнічування стає несиметричним і переміщається в міру зростання струму керування з положення 1 в положення 2, а потім 3. Якщо за зворотну магнітну проникність несиметричного циклу прийняти тангенс нахилу дотичній до кривої намагнічування у відповідних точках 2 або 3, то в міру збільшення Iу магнітна проникність матеріалу буде зменшуватися (рис. 1.1, в), знижується індуктивний опір робочих обмоток і струм у навантаженні збільшується (рис. 1.1, г). Напруга на обмотці знижується, в результаті чого зменшується і амплітуда індукції B~.
Отже,
шляхом зміни струму в обмотці керування
можна керувати струмом в навантаженні.
Виконуючи
обмотку
з числом витків, яке у кілька разів
перевищує число витків обмотки
можна отримати ефект підсилення по
струму.
У
цьому і полягає принцип дії магнітного
підсилювача.
Напрямок
струму Iу
в даному випадку не має значення, оскільки
крива намагнічування симетрична відносно
початку координат.
Тому
найпростіший магнітний підсилювач має
характеристику вхід - вихід, тобто
залежність вихідної величини
![]() від вхідних
від вхідних
![]() (рис.
1.1, г).
Подібні підсилювачі називають
однотактними, нейтральними або
нереверсійними.
(рис.
1.1, г).
Подібні підсилювачі називають
однотактними, нейтральними або
нереверсійними.
Підсилювачу, схема якого дана на рис. 1.1, притаманні серйозні недоліки. Пульсуючий в сердечнику змінний магнітний потік наводить в обмотці керування, як і у вторинній обмотці трансформатора, змінну ЕРС. Щоб усунути проходження по ланцюгу керування змінних струмів, в цей ланцюг можна помістити досить велику індуктивність L. Однак таке рішення не можна визнати вдалим, тому що,
- по-перше, включення індуктивної котушки сильно збільшує постійну часу ланцюга керування і, отже, інерційність всього підсилювача;
- по-друге, її габарити близькі до габаритів магнітного підсилювача. Включення ж замість індуктивності великого активного опору хоча і знижує постійну часу, але викликає втрати потужності в цьому опорі, що значно знижує коефіцієнт підсилення пристрою.
Для зменшення ЕРС, що наводяться в обмотці керування, доцільно розділити сердечник і обмотку на дві рівні частини (рис 1.2). Дві робочі обмотки повинні бути з'єднані так, щоб створювані ними напруженості H~ були спрямовані зустрічно відносно обмотки керування, що охоплює обидва сердечника. Дія двох змінних полів на обмотку керування в цьому випадку взаємно компенсується. Таке з'єднання обмоток приводить до того, що в один і той же півперіод змінного струму напруженості постійного і змінного магнітних полів складаються в одному і віднімаються в іншому сердечнику. У наступний півперіод сердечники міняються ролями.
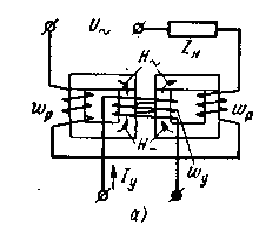
Рис. 1.2. Магнітний підсилювач на двох П-подібних сердечниках