

13.2.3. Метод Франка-Вульфа
Пусть решается следующая задача:
(13.20)
при условиях
![]() ,
,
,
,
![]() ,
,
![]() .
(13.21)
.
(13.21)
Отметим, что система ограничений этой задачи содержит только линейные неравенства. Это является основой для замены в окрестности исследуемой точки нелинейной целевой функции линейной, благодаря чему решения исходной задачи сводится к последовательному решению задач линейного программирования.
Алгоритм метода Франка-Вульфа
Начальный этап. Выбрать , , .
Основной этап.
Шаг 1. Определить .
Шаг 2. Решается задача:
![]() (13.22)
(13.22)
![]() -
решение этой задачи.
-
решение этой задачи.
Шаг
3. Если
![]() ,
то
-
задача решена.
,
то
-
задача решена.
Шаг
4. Выбираем направление
![]() .
.
Шаг 5. Находим (величина шага в направлении ), решая задачу одномерной оптимизации: .
Шаг
6. Положить
.
Определить
![]() .
.
Шаг
7. Если
![]() ,
то задача решена, в противном случае
положить
и перейти к шагу 1.
,
то задача решена, в противном случае
положить
и перейти к шагу 1.
Очевидно, что эту процедуру можно интерпретировать как метод возможных направлений. В самом деле, алгоритм Франка-Вульфа предусматривает, что исследуемые точки не выходят за пределы области допустимых решений задачи, а направление является возможным на каждой итерации метода.
Пример 13.5. Найти максимум функции
![]() (13.23)
(13.23)
при условиях
 .
(13.24)
.
(13.24)
Начальный
этап. Выбираем
начальную точку
![]() ,
,
,
,
![]() ,
.
,
.
Основной этап.
Итерация 1
Шаг
1. Определяем
![]() .
.
Шаг 2. Решаем задачу:
![]() ,
,
![]() ;
фактически решаем задачу
;
фактически решаем задачу
![]() .
.
Оптимальный
план этой задачи
![]() .
.
Шаг
3. Так как
![]() ,
переходим к шагу 4.
,
переходим к шагу 4.
Шаг
4. Выбираем
![]() .
.
Шаг 5. Находим шаг в направлении новой точки . Решение этой задачи (одномерной): .
Шаг 6. Находим новую точку:
![]() .
.
![]() .
.
Шаг
7. Так как
![]() ,
то
и перейти к шагу 1.
,
то
и перейти к шагу 1.
Итерация 2
Шаг
1. ![]() .
.
Шаг
2. Решаем вспомогательную задачу:
![]() .
Решением является
.
Решением является
![]() .
.
Шаг 3. Так как , переходим к шагу 4.
Шаг
4. Выбираем
![]() .
.
Шаг 5. Решаем задачу: .
Шаг
6. Положить
![]() .
.
![]() .
.
Шаг
7. Так как
![]() ,
то
и перейти к шагу 1.
,
то
и перейти к шагу 1.
Итерация 3
Шаг
1. ![]() .
.
Шаг
2. Решаем вспомогательную задачу:
![]() .
Решением является
.
Решением является
![]() .
.
Шаг
3. Так как
![]() ,
переходим к шагу 4.
,
переходим к шагу 4.
Шаг
4. Выбираем
![]() .
.
Шаг
5. Решаем задачу:
![]() .
.
![]() .
.
Решение
задачи
![]() .
.
Шаг
6. Положить
![]() .
.
![]() .
.
Шаг
7. Так как
![]() ,
то
,
то
![]() и задача решена.
и задача решена.
Замечание.
Задав меньшее значение
,
можно было, выполнив дополнительные
итерации, ещё ближе подойти к точке
максимального значения целевой функции
(очевидно, что это точка
![]() ).
).
Ход решения задачи проиллюстрирован на рис. 13.9.
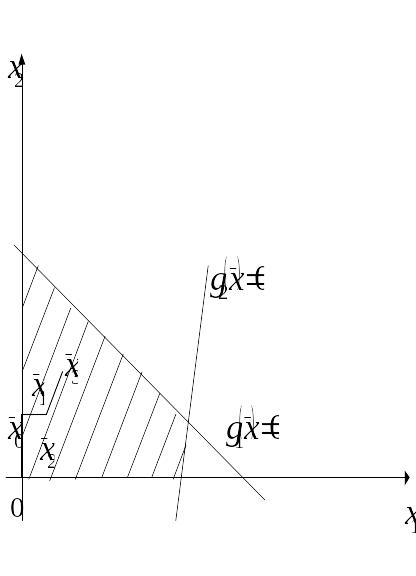
Рисунок 13.9. Метод Франка-Вульфа
Рассмотренные методы возможных направлений имеют две особенности – гарантированная сходимость для невыпуклых задач и допустимость получаемых точек. В качестве основных недостатков следует отметить медленную сходимость и неспособность удовлетворительно решать задачи с нелинейными ограничениями в виде равенств, так как у таких ограничений отсутствует допустимая внутренняя область.
В задаче выбора направлений берутся направления градиентного подъема. Кроме того, требование возможности выбираемого направления может приводить к отклонению от направления скорейшего подъема, что может в принципе уменьшить скорость приближения к решению. Таким образом, скорость сходимости в методах возможных направлений не выше, чем в градиентных методах безусловной оптимизации.
Следует отметить также, что недостатком методов возможных направлений является необходимость решения подзадач линейного программирования.