

Алгоритм метода Хука-Дживса, использующий одномерный поиск
Начальный
этап. Задать начальную точку
![]() ,
– параметр окончания счета, положить
,
– параметр окончания счета, положить
![]() ,
,
![]() .
.
Основной этап.
Вычислить
 – оптимальное решение задачи минимизации
функции
– оптимальное решение задачи минимизации
функции
 одномерной переменной
одномерной переменной
 .
.Положить
 .
.Если
 ,
то положить
,
то положить
 ,
перейти к шагу 1, иначе положить
,
перейти к шагу 1, иначе положить
 .
.Если
 ,
то положить
,
то положить
 и остановится.
и остановится.Положить
 ,
вычислить
,
вычислить
 ,
положить
,
положить
 ,
,
 ,
и перейти к шагу 1.
,
и перейти к шагу 1.
Пример 12.2. В таблице 12.1 и на рис. 12.4 приведены результаты решения задачи из примера 2.1 методом Хука-Дживса с использованием одномерной оптимизации.
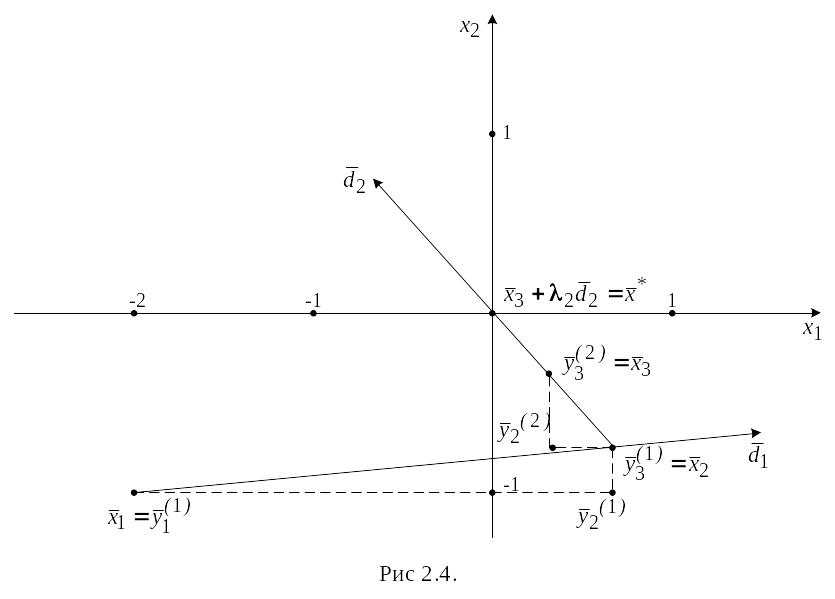
Таблица 12.1
k |
|
j |
|
|
|
|
|
|
|
|
1 |
(-2;-1) 63 |
1 2 |
(-2;-1) (0,5;-1) |
(1;0) (0;1) |
2,5 1/6 |
(0,5;-1) (0,5;-5/6) |
(1/2;-5/6) 5/12 |
(-2;-1) |
|
|
2 |
5/12 |
1 2 |
|
(1;0) (0;1) |
|
|
|
|
|
(0;0) |
Метод покоординатного спуска
В
этом методе в качестве направлений
поиска используются координатные
векторы
![]() ,
вследствие чего у текущей точки на
каждой итерации изменяется лишь одна
координата. Существуют многочисленные
варианты покоординатного спуска, в
частности использующие и не использующие
методы одномерного поиска.
,
вследствие чего у текущей точки на
каждой итерации изменяется лишь одна
координата. Существуют многочисленные
варианты покоординатного спуска, в
частности использующие и не использующие
методы одномерного поиска.
Алгоритм метода циклического покоординатного спуска, использующий одномерный поиск
Начальный этап. Задать начальную точку , – параметр окончания счета, положить , .
Основной этап.
Вычислить .
Положить .
Если
 ,
то положить
,
перейти к шагу 1, иначе положить
.
,
то положить
,
перейти к шагу 1, иначе положить
.Если , то положить и остановится, иначе положить
 ,
,
и перейти к шагу 1.
,
,
и перейти к шагу 1.
Очевидно,
что рассмотренный выше алгоритм
Хука-Дживса, использующий одномерный
поиск, является модификацией метода
покоординатного спуска. Эта модификация
за счет проведения поиска вдоль
направления
существенно ускоряет сходимость метода,
особенно в тех случаях, когда линии
уровня функции
![]() искривлены или растянуты.
искривлены или растянуты.
Пример
12.3. Решить задачу из примера 12.1 методом
циклического покоординатного спуска.
Результаты вычислений приведены в
таблице 12.2 и на рис. 12.5. На каждой итерации
(k=1,2,…) векторы
![]() и
и
![]() получены в результате одномерной
оптимизации по направлениям
получены в результате одномерной
оптимизации по направлениям
![]() и
и
![]() .
На первых итерациях функция
заметно убывает, затем этот процесс
сильно замедляется. После пяти итераций
получена точка
.
На первых итерациях функция
заметно убывает, затем этот процесс
сильно замедляется. После пяти итераций
получена точка
![]() ,
значение функции в которой равно
,
значение функции в которой равно
![]() и
и
![]() (оптимальное решение
(оптимальное решение
![]() ,
).
Замедление сходимости объясняется
вытянутостью линий уровня функции
.
Сравнение с результатами решения этой
задачи методом Хука-Дживса (см. табл.
12.1) показывает, что поиск по образцу
(направление
)
улучшает сходимость, что позволило
получить решение задачи за две итерации.
,
).
Замедление сходимости объясняется
вытянутостью линий уровня функции
.
Сравнение с результатами решения этой
задачи методом Хука-Дживса (см. табл.
12.1) показывает, что поиск по образцу
(направление
)
улучшает сходимость, что позволило
получить решение задачи за две итерации.
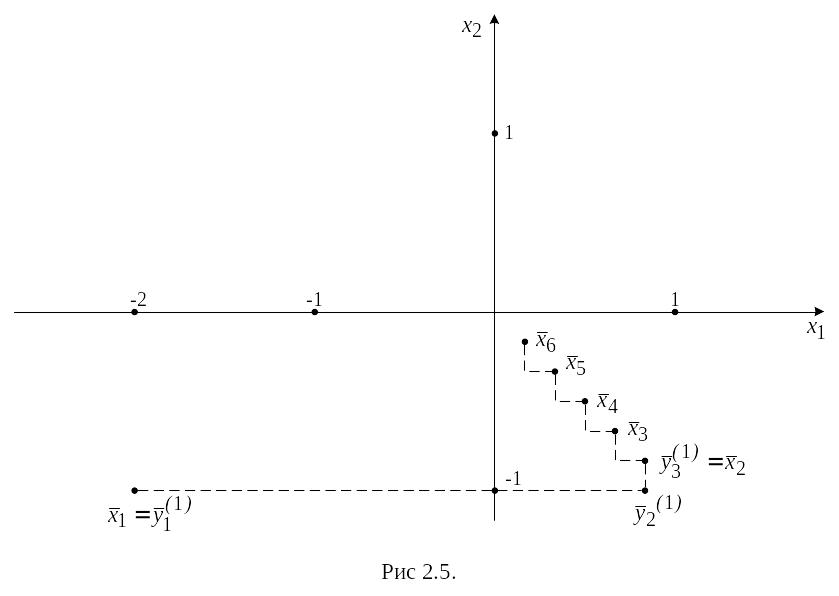

Таблица 2.2
k |
|
j |
|
|
|
|
|
1 |
(-2;-1) 63 |
1 2 |
(1;0) (0;1) |
(-2;-1) (1/2;-1) |
5/2 1/6 |
(1/2;-1) (1/2;-5/6) |
|
2 |
(1/2;-5/6) 5/12 |
1 2 |
(1;0) (0;1) |
(1/2;-5/6) (5/12;-10/12) |
-1/12 5/36 |
(5/12;-5/6) (5/12;-25/36) |
|
3 |
(5/12;-25/36)
|
1 2 |
(1;0) (0;1) |
(5/12;-25/36) (25/72;-25/36) |
-5/72 25/216 |
(25/72;-25/36) (25/72;-125/216) |
|
4 |
(25/72;-125/216)
|
1 2 |
(1;0) (0;1) |
(25/72;-125/216) (125/432;-125/216) |
-25/432 125/1296 |
(125/432;-125/216) (125/432;-625/1296) |
|
5 |
(125/432;-625/1296)
|
|
|
|
|
|
|
Алгоритм метода покоординатного спуска, не использующий одномерной оптимизации