

10.6. Теорема Куна-Таккера. Случай линейных ограничений
Рассмотрим следующую задачу выпуклого программирования
, (10.44)
![]() , (10.45)
, (10.45)
где
– вогнутая функция,
![]() ,
,
,
,
![]() – заданные векторы.
– заданные векторы.
Оказывается, если ограничения, задающие множество , линейны, то теоремы (10.5) и (10.6) справедливы без предположения о регулярности множества .
Теорема 10.7. Для того чтобы точка была решением задачи (10.44), (10.45), необходимо и достаточно существование такого , чтобы точка была седловой точкой функции Лагранжа задачи выпуклого программирования (10.44)-(10.45).
Доказательство.
Достаточность доказана в теореме 10.3.
Необходимость.
Пусть точка
является решением задачи (10.44), (10.45).
Рассмотрим возможное направление
из точки
.
Тогда по определению существует число
![]() ,
такое что
,
такое что
![]() при всех
при всех
![]() ,
,
![]() .
Так как
,
то
.
Так как
,
то
![]() ,
. (10.46)
,
. (10.46)
Введем
множество индексов
![]() ,
,
![]() .
Тогда из (10.46) с учетом того, что
,
получим: если
.
Тогда из (10.46) с учетом того, что
,
получим: если
![]() ,
то
,
то
![]() или
или
![]() ,
если
,
если
![]() ,
то
,
то
![]() ,
откуда
,
откуда
![]() или
или
![]() .
.
Рассмотрим конус
![]() ,
(10.47)
,
(10.47)
где
![]() – j-й
единичный вектор.
– j-й
единичный вектор.
Очевидно,
что любое возможное направление
в точке
принадлежит
![]() .
.
Обратно:
если
![]() ,
то
,
то
![]() – возможное направление в точке
.
В самом деле, если
,
то
– возможное направление в точке
.
В самом деле, если
,
то
![]() и
и
![]() для всех
для всех
![]() и
и
![]() ,
а если
,
а если
![]() ,
т.е.
,
т.е.
![]() ,
то
,
то
![]() для всех
,
где
– достаточно малое число. Если
,
то
для всех
,
где
– достаточно малое число. Если
,
то
![]() для всех
и
,
а если
для всех
и
,
а если
![]() ,
то
,
то
![]() и
и
![]() ,
при достаточно малом
.
,
при достаточно малом
.
Таким образом, множество возможных направлений в точке представляет собой конус (10.47).
Для того чтобы было решением задачи (10.44),(10.45), необходимо выполнение неравенства
для всех . (10.48)
Возьмем
любое
![]() .
Тогда
.
Тогда
![]() ,
,
.
Представим
(10.48), откуда получим, что
,
,
.
Представим
(10.48), откуда получим, что
![]() или
или
![]() для всех
.
Это означает, что
для всех
.
Это означает, что
![]() .
Тогда по теореме Фаркаша
найдутся
числа
.
Тогда по теореме Фаркаша
найдутся
числа
![]() ,
и
,
,
и
,
![]() ,
такие что
,
такие что
![]() (10.49)
(10.49)
Если
доопределить
,
,
то получим вектор
![]() .
Тогда
.
Тогда
![]() ,
, (10.50)
,
, (10.50)
т.е. доказано выполнение условий (10.14) теоремы 10.1.
Перепишем (10.49) в виде
![]() . (10.51)
. (10.51)
В
задаче (10.44)-(10.45) функция Лагранжа имеет
вид
![]() ,
,
.
,
,
.
Используя
неравенство
![]() для вогнутой функции
для вогнутой функции
, получим:
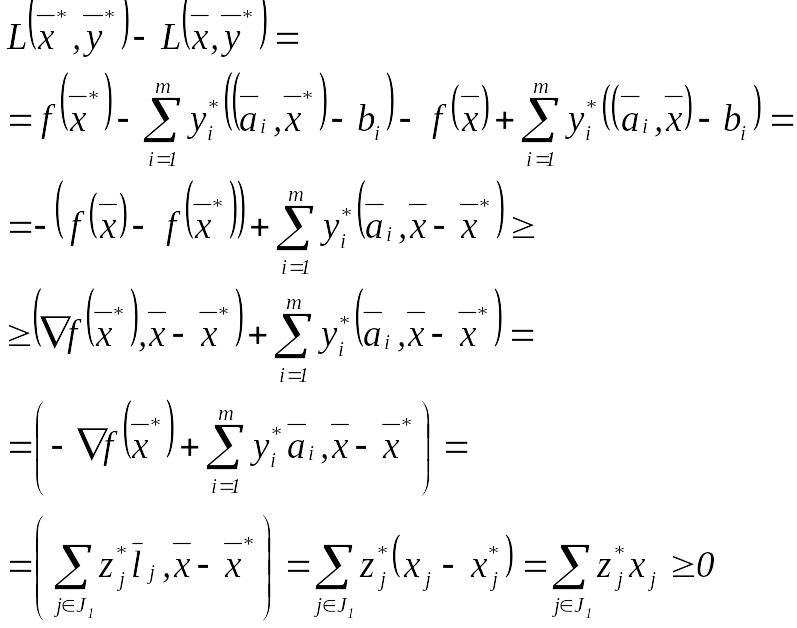
или для всех , т.е. выполнено условие (10.13) теоремы 10.1.
Таким образом, из теоремы 10.1. следует, что – седловая точка функции Лагранжа задачи выпуклого программирования (10.44), (10.45).
Если в задаче (10.44), (10.45) функция является непрерывно-дифференцируемой, то справедлива теорема 10.8.
Теорема 10.8. Для того чтобы точка была решением задачи (10.44), (10.45), необходимо и достаточно существование такого , чтобы для точки выполнялись условия (10.18)-(10.23).
Глава 11. Квадратичное програмирование.
11.1. Постановка задачи квадратичного программирования (зкп)
Определение 11.1. ЗКП назовем следующую задачу:
![]() (11.1)
(11.1)
![]() ,
(11.2)
,
(11.2)
где
– симметричная неположительно
определенная матрица,
– заданный вектор из
,
– заданная матрица, порядка
![]() ,
.
,
.
Так как функция
f(x)=
![]() (11.3)
(11.3)
является вогнутой ( – неположительно определенная матрица) , а ограничения (11.2) являются линейными, то ЗКП является задачей выпуклого программирования (ЗВП) с линейными ограничениями, следовательно, к ее решению можно применить теорию Куна-Таккера.
Замечание 11.1. Если матрица С является симметричной отрицательно определенной, то функция f(x) является сильно вогнутой, что гарантирует существование и единственность решения ЗКП.
ЗКП часто возникают в различных экономических приложениях (задача выбора портфеля ценных бумаг, задача построения регрессии при наличии ограничений и т.д.), кроме того они возникают как вспомогательные в составе различных методов оптимизации. Поэтому важно иметь достаточно простые методы решения ЗКП. Оказывается, что для ЗКП, как и для ЗЛП, существуют конечные методы их решения, например, основанные на теории Куна-Таккера.
Пример 11.1.
![]()
![]()
![]()
![]()
![]() ,
,
где
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Пример 11.2.
![]()
![]()
![]()
,
где
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
так как в определении 11.1
,
так как в определении 11.1
![]() ,
то вместо
берем
,
то вместо
берем
![]() .
.